Review: Electrostatics and Magnetostatics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Electrostatics Vs Magnetostatics Electrostatics Magnetostatics
Electrostatics vs Magnetostatics Electrostatics Magnetostatics Stationary charges ⇒ Constant Electric Field Steady currents ⇒ Constant Magnetic Field Coulomb’s Law Biot-Savart’s Law 1 ̂ ̂ 4 4 (Inverse Square Law) (Inverse Square Law) Electric field is the negative gradient of the Magnetic field is the curl of magnetic vector electric scalar potential. potential. 1 ′ ′ ′ ′ 4 |′| 4 |′| Electric Scalar Potential Magnetic Vector Potential Three Poisson’s equations for solving Poisson’s equation for solving electric scalar magnetic vector potential potential. Discrete 2 Physical Dipole ′′′ Continuous Magnetic Dipole Moment Electric Dipole Moment 1 1 1 3 ∙̂̂ 3 ∙̂̂ 4 4 Electric field cause by an electric dipole Magnetic field cause by a magnetic dipole Torque on an electric dipole Torque on a magnetic dipole ∙ ∙ Electric force on an electric dipole Magnetic force on a magnetic dipole ∙ ∙ Electric Potential Energy Magnetic Potential Energy of an electric dipole of a magnetic dipole Electric Dipole Moment per unit volume Magnetic Dipole Moment per unit volume (Polarisation) (Magnetisation) ∙ Volume Bound Charge Density Volume Bound Current Density ∙ Surface Bound Charge Density Surface Bound Current Density Volume Charge Density Volume Current Density Net , Free , Bound Net , Free , Bound Volume Charge Volume Current Net , Free , Bound Net ,Free , Bound 1 = Electric field = Magnetic field = Electric Displacement = Auxiliary -

Review of Electrostatics and Magenetostatics
Review of electrostatics and magenetostatics January 12, 2016 1 Electrostatics 1.1 Coulomb’s law and the electric field Starting from Coulomb’s law for the force produced by a charge Q at the origin on a charge q at x, qQ F (x) = 2 x^ 4π0 jxj where x^ is a unit vector pointing from Q toward q. We may generalize this to let the source charge Q be at an arbitrary postion x0 by writing the distance between the charges as jx − x0j and the unit vector from Qto q as x − x0 jx − x0j Then Coulomb’s law becomes qQ x − x0 x − x0 F (x) = 2 0 4π0 jx − xij jx − x j Define the electric field as the force per unit charge at any given position, F (x) E (x) ≡ q Q x − x0 = 3 4π0 jx − x0j We think of the electric field as existing at each point in space, so that any charge q placed at x experiences a force qE (x). Since Coulomb’s law is linear in the charges, the electric field for multiple charges is just the sum of the fields from each, n X qi x − xi E (x) = 4π 3 i=1 0 jx − xij Knowing the electric field is equivalent to knowing Coulomb’s law. To formulate the equivalent of Coulomb’s law for a continuous distribution of charge, we introduce the charge density, ρ (x). We can define this as the total charge per unit volume for a volume centered at the position x, in the limit as the volume becomes “small”. -
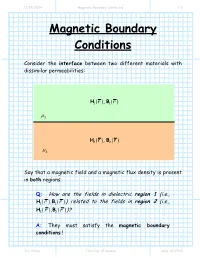
Magnetic Boundary Conditions 1/6
11/28/2004 Magnetic Boundary Conditions 1/6 Magnetic Boundary Conditions Consider the interface between two different materials with dissimilar permeabilities: HB11(r,) (r) µ1 HB22(r,) (r) µ2 Say that a magnetic field and a magnetic flux density is present in both regions. Q: How are the fields in dielectric region 1 (i.e., HB11()rr, ()) related to the fields in region 2 (i.e., HB22()rr, ())? A: They must satisfy the magnetic boundary conditions ! Jim Stiles The Univ. of Kansas Dept. of EECS 11/28/2004 Magnetic Boundary Conditions 2/6 First, let’s write the fields at the interface in terms of their normal (e.g.,Hn ()r ) and tangential (e.g.,Ht (r ) ) vector components: H r = H r + H r H1n ()r 1 ( ) 1t ( ) 1n () ˆan µ 1 H1t (r ) H2t (r ) H2n ()r H2 (r ) = H2t (r ) + H2n ()r µ 2 Our first boundary condition states that the tangential component of the magnetic field is continuous across a boundary. In other words: HH12tb(rr) = tb( ) where rb denotes to any point along the interface (e.g., material boundary). Jim Stiles The Univ. of Kansas Dept. of EECS 11/28/2004 Magnetic Boundary Conditions 3/6 The tangential component of the magnetic field on one side of the material boundary is equal to the tangential component on the other side ! We can likewise consider the magnetic flux densities on the material interface in terms of their normal and tangential components: BHrr= µ B1n ()r 111( ) ( ) ˆan µ 1 B1t (r ) B2t (r ) B2n ()r BH222(rr) = µ ( ) µ2 The second magnetic boundary condition states that the normal vector component of the magnetic flux density is continuous across the material boundary. -
Electro Magnetic Fields Lecture Notes B.Tech
ELECTRO MAGNETIC FIELDS LECTURE NOTES B.TECH (II YEAR – I SEM) (2019-20) Prepared by: M.KUMARA SWAMY., Asst.Prof Department of Electrical & Electronics Engineering MALLA REDDY COLLEGE OF ENGINEERING & TECHNOLOGY (Autonomous Institution – UGC, Govt. of India) Recognized under 2(f) and 12 (B) of UGC ACT 1956 (Affiliated to JNTUH, Hyderabad, Approved by AICTE - Accredited by NBA & NAAC – ‘A’ Grade - ISO 9001:2015 Certified) Maisammaguda, Dhulapally (Post Via. Kompally), Secunderabad – 500100, Telangana State, India ELECTRO MAGNETIC FIELDS Objectives: • To introduce the concepts of electric field, magnetic field. • Applications of electric and magnetic fields in the development of the theory for power transmission lines and electrical machines. UNIT – I Electrostatics: Electrostatic Fields – Coulomb’s Law – Electric Field Intensity (EFI) – EFI due to a line and a surface charge – Work done in moving a point charge in an electrostatic field – Electric Potential – Properties of potential function – Potential gradient – Gauss’s law – Application of Gauss’s Law – Maxwell’s first law, div ( D )=ρv – Laplace’s and Poison’s equations . Electric dipole – Dipole moment – potential and EFI due to an electric dipole. UNIT – II Dielectrics & Capacitance: Behavior of conductors in an electric field – Conductors and Insulators – Electric field inside a dielectric material – polarization – Dielectric – Conductor and Dielectric – Dielectric boundary conditions – Capacitance – Capacitance of parallel plates – spherical co‐axial capacitors. Current density – conduction and Convection current densities – Ohm’s law in point form – Equation of continuity UNIT – III Magneto Statics: Static magnetic fields – Biot‐Savart’s law – Magnetic field intensity (MFI) – MFI due to a straight current carrying filament – MFI due to circular, square and solenoid current Carrying wire – Relation between magnetic flux and magnetic flux density – Maxwell’s second Equation, div(B)=0, Ampere’s Law & Applications: Ampere’s circuital law and its applications viz. -

Magnetism Known to the Early Chinese in 12Th Century, and In
Magnetism Known to the early Chinese in 12th century, and in some detail by ancient Greeks who observed that certain stones “lodestones” attracted pieces of iron. Lodestones were found in the coastal area of “Magnesia” in Thessaly at the beginning of the modern era. The name of magnetism derives from magnesia. William Gilbert, physician to Elizabeth 1, made magnets by rubbing Fe against lodestones and was first to recognize the Earth was a large magnet and that lodestones always pointed north-south. Hence the use of magnetic compasses. Book “De Magnete” 1600. The English word "electricity" was first used in 1646 by Sir Thomas Browne, derived from Gilbert's 1600 New Latin electricus, meaning "like amber". Gilbert demonstrates a “lodestone” compass to ER 1. Painting by Auckland Hunt. John Mitchell (1750) found that like electric forces magnetic forces decrease with separation (conformed by Coulomb). Link between electricity and magnetism discovered by Hans Christian Oersted (1820) who noted a wire carrying an electric current affected a magnetic compass. Conformed by Andre Marie Ampere who shoes electric currents were source of magnetic phenomena. Force fields emanating from a bar magnet, showing Nth and Sth poles (credit: Justscience 2017) Showing magnetic force fields with Fe filings (Wikipedia.org.) Earth’s magnetic field (protects from damaging charged particles emanating from sun. (Credit: livescience.com) Magnetic field around wire carrying a current (stackexchnage.com) Right hand rule gives the right sign of the force (stackexchnage.com) Magnetic field generated by a solenoid (miniphyiscs.com) Van Allen radiation belts. Energetic charged particles travel along B lines Electric currents (moving charges) generate magnetic fields but can magnetic fields generate electric currents. -

F = BIL (F=Force, B=Magnetic Field, I=Current, L=Length of Conductor)
Magnetism Joanna Radov Vocab: -Armature- is the power producing part of a motor -Domain- is a region in which the magnetic field of atoms are grouped together and aligned -Electric Motor- converts electrical energy into mechanical energy -Electromagnet- is a type of magnet whose magnetic field is produced by an electric current -First Right-Hand Rule (delete) -Fixed Magnet- is an object made from a magnetic material and creates a persistent magnetic field -Galvanometer- type of ammeter- detects and measures electric current -Magnetic Field- is a field of force produced by moving electric charges, by electric fields that vary in time, and by the 'intrinsic' magnetic field of elementary particles associated with the spin of the particle. -Magnetic Flux- is a measure of the amount of magnetic B field passing through a given surface -Polarized- when a magnet is permanently charged -Second Hand-Right Rule- (delete) -Solenoid- is a coil wound into a tightly packed helix -Third Right-Hand Rule- (delete) Major Points: -Similar magnetic poles repel each other, whereas opposite poles attract each other -Magnets exert a force on current-carrying wires -An electric charge produces an electric field in the region of space around the charge and that this field exerts a force on other electric charges placed in the field -The source of a magnetic field is moving charge, and the effect of a magnetic field is to exert a force on other moving charge placed in the field -The magnetic field is a vector quantity -We denote the magnetic field by the symbol B and represent it graphically by field lines -These lines are drawn ⊥ to their entry and exit points -They travel from N to S -If a stationary test charge is placed in a magnetic field, then the charge experiences no force. -

Magnetic Flux and Flux Linkage
Magnetic Flux and Flux Linkage To be able to calculate and explain the magnetic flux through a coil of wire To be able to calculate the magnetic flux linkage of a coil of wire To be able to calculate the magnetic flux linkage of a rotating coil Magnetic Flux, Magnetic flux is a measure of how many magnetic field lines are passing through an area of A m2. The magnetic flux through an area A in a magnetic field of flux density B is given by: BA This is when B is perpendicular to A, so the normal to the area is in the same direction as the field lines. Magnetic Flux is measured in Webers, Wb The more field pass through area A, the greater the concentration and the stronger magnetic field. This is why a magnet is strongest at its poles; there is a high concentration of field lines. We can see that the amount of flux flowing through a loop of wire depends on the angle it makes with the field lines. The amount of flux passing through the loop is given by: θ is the angle that the normal to the loop makes with the field lines. Magnetic Flux Density We can now see why B is called the magnetic flux density. If we rearrange the top equation for B we get: B So B is a measure of how many flux lines (field lines) passes through each unit area (per m2). A A flux density of 1 Tesla is when an area of 1 metre squared has a flux of 1 Weber. -

Magnetostatics: Part 1 We Present Magnetostatics in Comparison with Electrostatics
Magnetostatics: Part 1 We present magnetostatics in comparison with electrostatics. Sources of the fields: Electric field E: Coulomb’s law Magnetic field B: Biot-Savart law Forces exerted by the fields: Electric: F = qE Mind the notations, both Magnetic: F = qvB printed and hand‐written Does the magnetic force do any work to the charge? F B, F v Positive charge moving at v B Negative charge moving at v B Steady state: E = vB By measuring the polarity of the induced voltage, we can determine the sign of the moving charge. If the moving charge carriers is in a perfect conductor, then we can have an electric field inside the perfect conductor. Does this contradict what we have learned in electrostatics? Notice that the direction of the magnetic force is the same for both positive and negative charge carriers. Magnetic force on a current carrying wire The magnetic force is in the same direction regardless of the charge carrier sign. If the charge carrier is negative Carrier density Charge of each carrier For a small piece of the wire dl scalar Notice that v // dl A current-carrying wire in an external magnetic field feels the force exerted by the field. If the wire is not fixed, it will be moved by the magnetic force. Some work must be done. Does this contradict what we just said? For a wire from point A to point B, For a wire loop, If B is a constant all along the loop, because Let’s look at a rectangular wire loop in a uniform magnetic field B. -

Lecture 8: Magnets and Magnetism Magnets
Lecture 8: Magnets and Magnetism Magnets •Materials that attract other metals •Three classes: natural, artificial and electromagnets •Permanent or Temporary •CRITICAL to electric systems: – Generation of electricity – Operation of motors – Operation of relays Magnets •Laws of magnetic attraction and repulsion –Like magnetic poles repel each other –Unlike magnetic poles attract each other –Closer together, greater the force Magnetic Fields and Forces •Magnetic lines of force – Lines indicating magnetic field – Direction from N to S – Density indicates strength •Magnetic field is region where force exists Magnetic Theories Molecular theory of magnetism Magnets can be split into two magnets Magnetic Theories Molecular theory of magnetism Split down to molecular level When unmagnetized, randomness, fields cancel When magnetized, order, fields combine Magnetic Theories Electron theory of magnetism •Electrons spin as they orbit (similar to earth) •Spin produces magnetic field •Magnetic direction depends on direction of rotation •Non-magnets → equal number of electrons spinning in opposite direction •Magnets → more spin one way than other Electromagnetism •Movement of electric charge induces magnetic field •Strength of magnetic field increases as current increases and vice versa Right Hand Rule (Conductor) •Determines direction of magnetic field •Imagine grasping conductor with right hand •Thumb in direction of current flow (not electron flow) •Fingers curl in the direction of magnetic field DO NOT USE LEFT HAND RULE IN BOOK Example Draw magnetic field lines around conduction path E (V) R Another Example •Draw magnetic field lines around conductors Conductor Conductor current into page current out of page Conductor coils •Single conductor not very useful •Multiple winds of a conductor required for most applications, – e.g. -

Modeling of Ferrofluid Passive Cooling System
Excerpt from the Proceedings of the COMSOL Conference 2010 Boston Modeling of Ferrofluid Passive Cooling System Mengfei Yang*,1,2, Robert O’Handley2 and Zhao Fang2,3 1M.I.T., 2Ferro Solutions, Inc, 3Penn. State Univ. *500 Memorial Dr, Cambridge, MA 02139, [email protected] Abstract: The simplicity of a ferrofluid-based was to develop a model that supports results passive cooling system makes it an appealing from experiments conducted on a cylindrical option for devices with limited space or other container of ferrofluid with a heat source and physical constraints. The cooling system sink [Figure 1]. consists of a permanent magnet and a ferrofluid. The experiments involved changing the Ferrofluids are composed of nanoscale volume of the ferrofluid and moving the magnet ferromagnetic particles with a temperature- to different positions outside the ferrofluid dependant magnetization suspended in a liquid container. These experiments tested 1) the effect solvent. The cool, magnetic ferrofluid near the of bringing the heat source and heat sink closer heat sink is attracted toward a magnet positioned together and using less ferrofluid, and 2) the near the heat source, thereby displacing the hot, optimal position for the permanent magnet paramagnetic ferrofluid near the heat source and between the heat source and sink. In the model, setting up convective cooling. This paper temperature-dependent magnetic properties were explores how COMSOL Multiphysics can be incorporated into the force component of the used to model a simple cylinder representation of momentum equation, which was coupled to the such a cooling system. Numerical results from heat transfer module. The model was compared the model displayed the same trends as empirical with experimental results for steady-state data from experiments conducted on the cylinder temperature trends and for appropriate velocity cooling system. -

We Continue to Compare the Electrostatic and Magnetostatic Fields. the Electrostatic Field Is Conservative
We continue to compare the electrostatic and magnetostatic fields. The electrostatic field is conservative: This allows us to define the potential V: dl because a b is independent of the path. If a vector field has no curl (i.e., is conservative), it must be something's gradient. Gravity is conservative. Therefore you do see water flowing in such a loop without a pump in the physical world. For the magnetic field, If a vector field has no divergence (i.e., is solenoidal), it must be something's curl. In other words, the curl of a vector field has zero divergence. Let’s use another physical context to help you understand this math: Ampère’s law J ds 0 Kirchhoff's current law (KCL) S Since , we can define a vector field A such that Notice that for a given B, A is not unique. For example, if then , because Similarly, for the electrostatic field, the scalar potential V is not unique: If then You have the freedom to choose the reference (Ampère’s law) Going through the math, you will get Here is what means: Just notation. Notice that is a vector. Still remember what means for a scalar field? From a previous lecture: Recall that the choice for A is not unique. It turns out that we can always choose A such that (Ampère’s law) The choice for A is not unique. We choose A such that Here is what means: Notice that is a vector. Thus this is actually three equations: Recall the definition of for a scalar field from a previous lecture: Poisson’s equation for the magnetic field is actually three equations: Compare Poisson’s equation for the magnetic field with that for the electrostatic field: Given J, you can solve A, from which you get B by Given , you can solve V, from which you get E by Exams (Test 2 & Final) problems will not involve the vector potential. -

Juan Alberto Garcia the University of Texas at El Paso
Juan Alberto Garcia The University of Texas at El Paso Is that all there is about E&M then??? F*@# no!! Electricity and Magnetism… no more! Electromagnetism!! • Hans Christian Ørsted ‐ Professor at Copenhagen ‐ Discovered (in 1820) one connection!! ‐ This one ‐ Well actually.. • One problem… he didn’t follow his experiment, but he published it tough. ! =D • Meanwhile in the Faraday world.. Devy kept Faraday performing tasks that were not desired by him.. • 1821 Ampère published his research…. Ampère • Force between two wires with electricity • They attract or repel each other .. Depending on the direction of the current!! • Led to the foundation of Electrodynamics • It was not until 1831 that Faraday finally started working in E&M and explained… • .. • Induction!!!! But First!!, Flux • Magnetic Flux A A B B Induction • Explained by Faraday! (this guy) • That is faraday’s law… well the easy form.. • It means the following…. • Well this is better… Lenz’s Law • Corollary of Faraday’s Law and Ohm’s Law • The emf induced in an electric circuit always acts in such a direction that the current it drives around the circuit opposes the change in magnetic flux which produces the emf. Maxwell • And then.. There was Maxwell • On Physical Lines of Force, March 1861 , Published 20 equations with 20 variables which were a compilation of what was know at the time. • Then on A Treatise on Electricity and Magnetism in 1873 he published what are known as the Maxwell’s Equations. Maxwell’s Equations • 4 PDE’s that describe the “Fields.” • They are in descending order (in free space): • Gauss’s law for E‐fields • Gauss’s law for B‐fields • Faraday’s Law • Ampère’s Law And then, there was light… • Turns out Maxwell’s Equations describe fields that Oscillate through space.