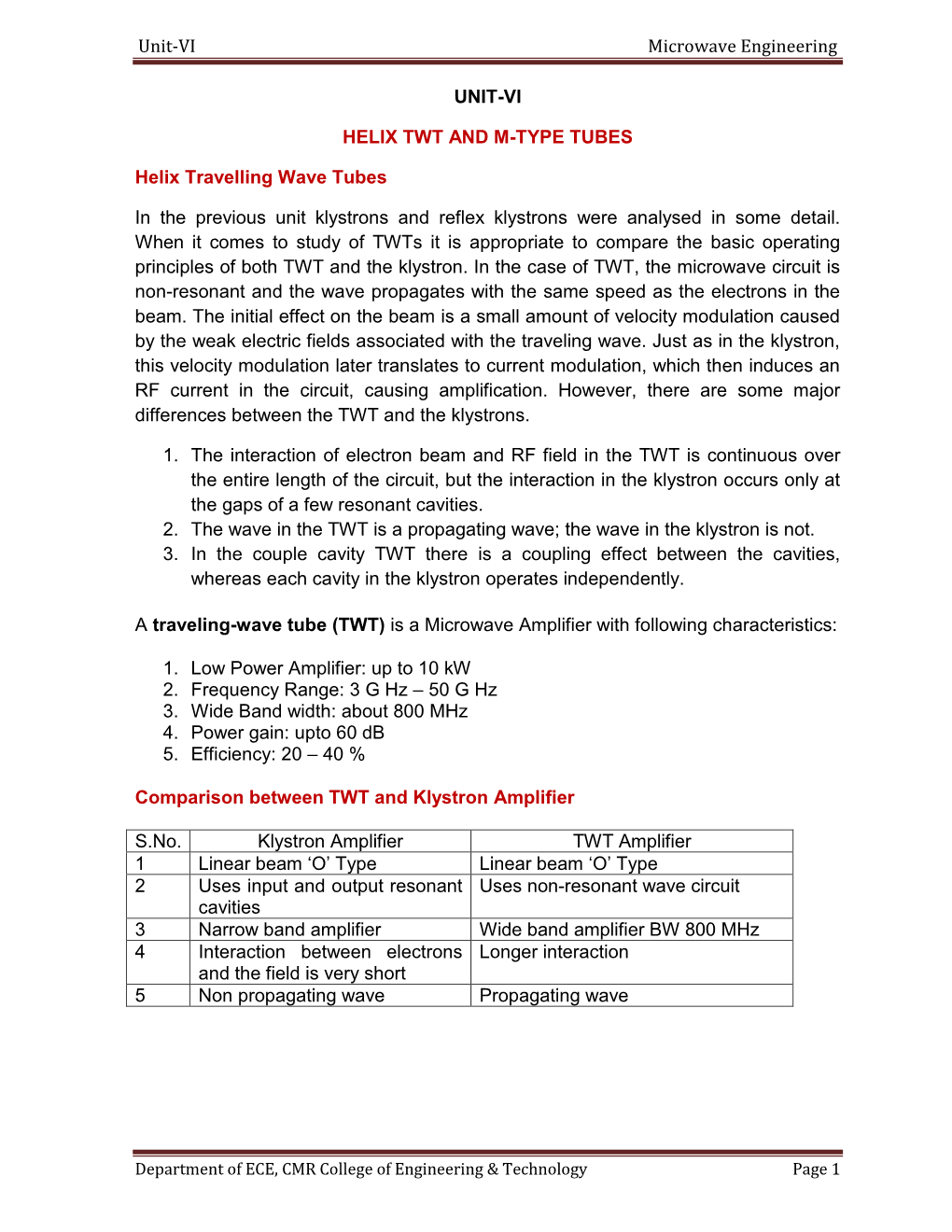
HELIX TWT and M-TYPE TUBES Helix Travelling Wave Tubes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Review of Power Sources
RF Power Generation With Klystrons amongst other things Dr. C Lingwood Includes slides by Professor R.G. Carter and A Dexter Engineering Department, Lancaster University, U.K. and The Cockcroft Institute of Accelerator Science and Technology • Basic Klystron Principals • Existing technology • Underrating • Modulation anodes • Other options – IOTS – Magnetrons June 2011 ESS Workshop June 2 IOT June 2011 ESS Workshop June 3 IOT Output gap June 2011 ESS Workshop June 4 Velocity modulation • An un-modulated electron beam passes through a cavity resonator with RF input • Electrons accelerated or retarded according to the phase of the gap voltage: Beam is velocity modulated: • As the beam drifts downstream bunches of electrons are formed as shown in the Applegate diagram • An output cavity placed downstream extracts RF power just as in an IOT • This is a simple 2-cavity klystron • Conduction angle = 180° (Class B) June 2010 CAS RF for Accelerators, Ebeltoft 5 Multi-cavity klystron • Additional cavities are used to increase gain, efficiency and bandwith • Bunches are formed by the first (N-1) cavities • Power is extracted by the Nth cavity • Electron gun is a space- charge limited diode with perveance given by I0 K 3 2 V0 • K × 106 is typically 0.5 - 2.0 • Beam is confined by an axial magnetic field Photo courtesy of Thales Electron Devices June 2010 CAS RF for Accelerators, Ebeltoft 6 Efficiency and Perveance • Second harmonic cavity used to increase bunching • Maximum possible efficiency with second harmonic cavity is approximately 6 e 0.85 -

5.1 Audio and Video System L T
5.1 AUDIO AND VIDEO SYSTEM L T P 4 - 4 Unit:- I (22 Periods) Audio System 1.1 Basics of Working Principle, Construction, polar pattern, frequency response & application of Carbon, moving coil, velocity, crystal, condenser & cordless microphones. 1.2 Basics of Working Principle, Construction, polar pattern, frequency response & application of direct radiating & horn Loud Speaker. Basic idea of woofer, tweeter, mid range, multi-speaker system, baffles and enclosures. crossover networks, Speakers column. UNIT: 2 (20 Periods) SOUND RECORDING:- 1- Fundamentals of Sound recording on Disc & magnetic tape. Brief principle of sound recording. Concept of tape transport mechanism 2- Digital sound recording on tape and disc. Brief concept of VCD, DVD and Video Camera. 3- Principle of video recording on CDs and DVDs. Recordable and Rewritable CDs. Idea of pre-amplifier, amplifier and equalizer system, stereo amplifiers. Unit:3 (12 Periods) ACOUSTIC REVERBERATION:- 1- Reverberation of sound. Absorption and Insulation of sound. Acoustics of auditorium sound in enclosures. Absorption coefficient of various acoustic materials. (No mathematical derivations). Unit 04 (10 Periods) VIDEO CAMERA:- 1- Main features, Working principle, Area of application, Identification of various stages and main components, of single tube camera, ENG camera. TEXT BOOKS 1. A. Sharma- Audio Video & TV Engineering- Danpat rai & Sons. 2. Benson & Whitaker - Television and Audio Handbook- McGrawHill Pub. LIST OF PRACTICAL’S 1- Study of different features and Measurement of directivity of various types of microphones and loudspeakers. (Approximate). 2- Draw the frequency response, bass and treble response of stereo amplifier. 3- Channel separation in stereo amplifier and measurement of its distortion. 4- Installation and operation of a stereo system amplifier. -

Comparative Overview of Inductive Output Tubes
! ESS AD Technical Note ! ESS/AD/0033 ! ! ! ! ! ! !!!!!!!!!! ! !!!Accelerator Division ! ! ! ! ! ! ! ! ! ! Comparative Overview of Inductive Output Tubes Rihua Zeng, Anders J. Johansson, Karin Rathsman and Stephen Molloy Influence of the Droop and Ripple of Modulator onRebecca Klystron SeviourOutput June 2011 23 February 2012 I. Introduction An IOT is a beam driven vacuum electronic RF amplifier. This document represents a comparative overview of the Inductive Output Tube (IOT). Starting with an overview of the IOT, we progress to a comparative discussion of the IOT relative to other RF amplifiers, discussing the advantages and limitations within the frame work of the RF amplifier requirements for the ESS. A discussion on the current state of the art in IOTs is presented along with the status of research programmes to develop 352MHz and 704MHz IOT’s. II. Background The Inductive Output Tube (IOT) RF amplifier was first proposed by Haeff in 1938, but not really developed into a working technology until the 1980s. Although primarily developed for the television transmitters, IOTs have been, and currently are, used on a number of international high- powered particle accelerators, such as; Diamond, LANSCE, and CERN. This has created a precedence and expertise in their use for accelerator applications. IOTs are a modified form of conventional coaxial gridded tubes, similar to the tetrode, although modified towards a linear beam structure device, similar to a Klystron. This hybrid construct is sometimes described as a cross between a klystron and a triode, hence Eimacs trade name for IOTs, the Klystrode. A schematic of an IOT, taken from [1], is shown in Figure 1. -
Solid State Modulators – Efficiency Considerations Focussing on Sic Devices –
Eidgenössische Technische Hochschule Zürich Laboratory for High Swiss Federal Institute of Technology Zurich Power Electronic Systems Solid State Modulators – Efficiency Considerations focussing on SiC Devices – J. Biela, S. Stathis, M. Jaritz, and S. Blume www.hpe.ee.ethz.ch / [email protected] Typical Topology of Solid State Pulse Modulator Systems AC/DC rectifier unit DC/DC converter for charging C-bank / voltage adaption Pulse generation unit Load e.g. klystron Constant Power Pulsed Power AC DC Energy Storage Pulse Klystron Modulator Load DC DC Grid Medium Voltage ⎧⎪⎪⎪⎨⎪⎪⎪⎩ Sometimes integrated V V V V t Pulse t t t Pulse 400V or MV Intermediate Buffer Capacitor Bank Pulse Voltage High Power 2 33 Electronic Systems Typical Topology of Solid State Pulse Modulator Systems Grounded klystron load I Isolation with 50Hz transformer or I Isolated DC-DC converter Typical Isolation AC DC Energy Storage Pulse Klystron Modulator Load DC DC Grid Medium Voltage V V V V t Pulse t t t Pulse 400V or MV Intermediate Buffer Capacitor Bank Pulse Voltage High Power 3 33 Electronic Systems 29 MW(35MW)/140 µs Modulator for CLIC – System Efficiency – High Power Electronic Systems CLIC System Specifications Output voltage 150:::180 kV Settling time <8 µs Output power (pulsed) 29 MW (- 35 MW) Repetition rate 50 Hz Flat-top length 140 µs Average output power 203 kW (- 245 kW) Flat-top stability (FTS) <0.85 % Pulse to pulse repeatab. <100 ppm Rise time <3 µs 819 klystrons 819 klystrons 15 MW, 142 µs circumferences 15 MW, 142 µs delay loop 73 m drive beam -

Gan Or Gaas, TWT Or Klystron - Testing High Power Amplifiers for RADAR Signals Using Peak Power Meters
Application Note GaN or GaAs, TWT or Klystron - Testing High Power Amplifiers for RADAR Signals using Peak Power Meters Vitali Penso Applications Engineer, Boonton Electronics Abstract Measuring and characterizing pulsed RF signals used in radar applications present unique challenges. Unlike communication signals, pulsed radar signals are “on” for a short time followed by a long “off” period, during “on” time the system transmits anywhere from kilowatts to megawatts of power. The high power pulsing can stress the power amplifier (PA) in a number of ways both during the on/off transitions and during prolonged “on” periods. As new PA device technologies are introduced, latest one being GaN, the behavior of the amplifier needs to be thoroughly tested and evaluated. Given the time domain nature of the pulsed RF signal, the best way to observe the performance of the amplifier is through time domain signal analysis. This article explains why the peak power meter is a must have test instrument for characterizing the behavior of pulsed RF power amplifiers (PA) used in radar systems. Radar Power Amplifier Technology Overview Peak Power Meter for Pulsed RADAR Measurements Before we look at the peak power meter and its capabilities, let’s The most critical analysis of the pulsed RF signal takes place in the look at different technologies used in high power amplifiers (HPA) time domain. Since peak power meters measure, analyze and dis- for RADAR systems, particularly GaN on SiC, and why it has grabbed play the power envelope of a RF signal in the time domain, they the attention over the past decade. -

Numerical Studies and Optimization of Magnetron with Diffraction Output (MDO) Using Particle-In-Cell Simulations
Old Dominion University ODU Digital Commons Electrical & Computer Engineering Theses & Dissertations Electrical & Computer Engineering Fall 2015 Numerical Studies and Optimization of Magnetron with Diffraction Output (MDO) Using Particle-in-Cell Simulations Alireza Majzoobi Old Dominion University Follow this and additional works at: https://digitalcommons.odu.edu/ece_etds Part of the Electromagnetics and Photonics Commons, and the Physics Commons Recommended Citation Majzoobi, Alireza. "Numerical Studies and Optimization of Magnetron with Diffraction Output (MDO) Using Particle-in-Cell Simulations" (2015). Master of Science (MS), Thesis, Electrical & Computer Engineering, Old Dominion University, DOI: 10.25777/f6se-9e02 https://digitalcommons.odu.edu/ece_etds/1 This Thesis is brought to you for free and open access by the Electrical & Computer Engineering at ODU Digital Commons. It has been accepted for inclusion in Electrical & Computer Engineering Theses & Dissertations by an authorized administrator of ODU Digital Commons. For more information, please contact [email protected]. NUMERICAL STUDIES AND OPTIMIZATION OF MAGNETRON WITH DIFFRACTION OUTPUT (MDO) USING PARTICLE-IN-CELL SIMULATIONS by Alireza Majzoobi B.Sc. September 2007, Sharif University of Technology, Iran M.Sc. October 2011, University of Tehran, Iran A Thesis Submitted to the Faculty of Old Dominion University in Partial Fulfillment of the Requirements for the Degree of MASTER OF SCIENCE ELECTRICAL AND COMPUTER ENGINEERING OLD DOMINION UNIVERSITY December 2015 Approved by: Ravindra P. Joshi (Director) Linda Vahala (Member) Shu Xiao (Member) ABSTRACT NUMERICAL STUDIES AND OPTIMIZATION OF MAGNETRON WITH DIFFRACTION OUTPUT (MDO) USING PARTICLE-IN-CELL SIMULATIONS Alireza Majzoobi Old Dominion University, 2015 Director: Dr. Ravindra P. Joshi The first magnetron as a vacuum-tube device, capable of generating microwaves, was invented in 1913. -

Arecibo 430 Mhz Radar System
file: 430txman 12-98 draft Aug. 31, 2005 Arecibo 430 MHz Radar System Operation and Maintenance Manual Written by Jon Hagen April 2001, 2nd ed. May 2005 1 NOTE With its high-voltage and high-power, and high places, this transmitter is potentially lethal. Proper precautions must be taken to avoid electrical shock, RF exposure, and X-ray exposure. (See Section 22). Emergency Procedure: ELECTRIC SHOCK Neutralize power 1. De-energize the circuit by means of switch or circuit breaker or cut the line by an insulated cutter. 2. Safely remove the victim from contact with the energy source by using dry wood stick, plastic rope, leather belt, blanket or any other non-conductive materials. Call for help 1. Others can help you administer first aid 2. Others can call professional medical help and/or arrange transfer facilities Cardio Pulmonary Resuscitation (CPR) 1. Check victim's ABC A - airway: Clear and open airway by head tilt - chin lift maneuver B - breathing: Check and restore breathing by rescue breathing C- circulation: Check and restore circulation by external chest compression 2. If pulse is present, but not breathing, maintain one rescue breathing (mouth to mouth resuscitation) as long as necessary. 3. If pulse and breathing are absent, give external chest compressions (CPR). 4. If pulse and breathing are present, stop CPR, stabilize the victim. 5. Caution: Only properly trained personnel should administer CPR to avoid further harm to 2 the victim. Administer first aid for shock 1. Keep the victim lying down, warm and comfortable to maintain body heat until medical assistance arrive. -

Design and Simulation of 8-Cavity-Hole- Slot Type Magnetron on Cst-Particle Studio
DESIGN AND SIMULATION OF 8-CAVITY-HOLE- SLOT TYPE MAGNETRON ON CST-PARTICLE STUDIO A Dissertation Submitted in Partial Fulfillment of the Requirement for the Award of the Degree of MASTER OF ENGINEERING In Wireless Communication Submitted By SALMA KHATOON 801563022 Under Supervision of Dr. Rana Pratap Yadav Assistant professor, ECED ELECTRONICS AND COMMUNICATION ENGINEERING DEPARTMENT THAPAR UNIVERSITY, PATIALA, PUNJAB JULY, 2017 ii ACKNOWLEDGEMENT I would like to express my profound exaltation and gratitude to my mentor Dr. Rana Pratap Yadav for his candidate guidance, constructive propositions and over whelming inspiration in the nurturing work. It has been a blessing for me to spend many opportune moments under the guidance of the perfectionist at the acme of professionalism. The present work is testimony to his activity, inspiration and ardent personal interest, taken by him during the course of his work in its present form. I am also thankful to Dr. Alpana Agarwal, Head of Department, ECED & our P.G coordinator Dr. Ashutosh Kumar Singh Associate Professor. I would like to thank entire faculty members and staff of Electronics and Communication Engineering Department who devoted their valuable time and helped me in all possible ways towards successful completion of this work. I am also grateful to all the friends and colleagues who supported me throughout, I thankful all those who have contributed directly or indirectly to this work. I would like to express my sincere gratitude to all. Salma Khatoon ME (801563022) iii ABSTRACT In wireless communication technologies, three types of modulation have been used in modern radar systems commonly – pulse (as a particular type of amplitude); frequency; and phase modulation respectively. -

A Brief History of Microwave Engineering
A BRIEF HISTORY OF MICROWAVE ENGINEERING S.N. SINHA PROFESSOR DEPT. OF ELECTRONICS & COMPUTER ENGINEERING IIT ROORKEE Multiple Name Symbol Multiple Name Symbol 100 hertz Hz 101 decahertz daHz 10–1 decihertz dHz 102 hectohertz hHz 10–2 centihertz cHz 103 kilohertz kHz 10–3 millihertz mHz 106 megahertz MHz 10–6 microhertz µHz 109 gigahertz GHz 10–9 nanohertz nHz 1012 terahertz THz 10–12 picohertz pHz 1015 petahertz PHz 10–15 femtohertz fHz 1018 exahertz EHz 10–18 attohertz aHz 1021 zettahertz ZHz 10–21 zeptohertz zHz 1024 yottahertz YHz 10–24 yoctohertz yHz • John Napier, born in 1550 • Developed the theory of John Napier logarithms, in order to eliminate the frustration of hand calculations of division, multiplication, squares, etc. • We use logarithms every day in microwaves when we refer to the decibel • The Neper, a unitless quantity for dealing with ratios, is named after John Napier Laurent Cassegrain • Not much is known about Laurent Cassegrain, a Catholic Priest in Chartre, France, who in 1672 reportedly submitted a manuscript on a new type of reflecting telescope that bears his name. • The Cassegrain antenna is an an adaptation of the telescope • Hans Christian Oersted, one of the leading scientists of the Hans Christian Oersted nineteenth century, played a crucial role in understanding electromagnetism • He showed that electricity and magnetism were related phenomena, a finding that laid the foundation for the theory of electromagnetism and for the research that later created such technologies as radio, television and fiber optics • The unit of magnetic field strength was named the Oersted in his honor. -
The Radio Amateurs Microwave Communications Handbook.Pdf
1594 THE RADIO AMATEUR'S COM ' · CA 10 S HANDBOOK DAVE INGRAM, K4TWJ THE RADIO AMATEUR'S - MICROWAVE COMMUNICATIONS · HANDBOOK DAVE INGRAM, K4TWJ ITABI TAB BOOKS Inc. Blue Ridge Summit, PA 17214 Other TAB Books by the Author No. 1120 OSCAR: The Ham Radio Satellites No. 1258 Electronics Projects for Hams, SWLs, CSers & Radio Ex perimenters No. 1259 Secrets of Ham Radio DXing No. 1474 Video Electronics Technology FIRST EDITION FIRST PRINTING Copyright © 1985 by TAB BOOKS Inc. Printed in the United States of America Reproduction or publication of the content in any manner, without express permission of the publisher, is prohibited. No liability is assumed with respect to the use of the information herein. Library of Congress Cataloging in Publication Data Ingram, Dave. The radio amateur's microwave communications handbook. Includes index. 1. Microwave communication systems-Amateurs' manuals. I. Title. TK9957.154 1985 621.38'0413 85-22184 ISBN 0-8306-0194-5 ISBN 0-8306-0594-0 (pbk.) Contents Acknowledgments v Introduction vi 1 The Amateur 's Microwave Spectrum 1 The Early Days and Gear for Microwaves- The Microwave Spectrum- Microwavesand EME-Microwavesand the Am- ateur Satellite Program 2 Microwave Electronic Theory 17 Electronic Techniques for hf/vhf Ranges- Electronic Tech- niques for Microwaves-Klystron Operation-Magnetron Operation-Gunn Diode Theory 3 Popular Microwave Bands 29 Circuit and Antennas for the 13-cm Band-Designs for 13-cm Equipment 4 Communications Equipment for 1.2 GHz 42 23-cm Band Plan-Available Equipment- 23-cm OX 5 -

Ampleon Company Presentation
Microwave Journal Educational Webinar Ampleon Brings RF Power Innovations towards Industrial Heating Market Gerrit Huisman Robin Wesson Klaus Werner Nov, 17, 2016 Amplify the future | 1 Ampleon at a Glance Our Company Our Businesses • European Company / Headquarters in • Building transistors and other RF Power products Nijmegen/Netherlands for over 50 years • 1,250 employees globally in 18 sites • Industry Leader for 35 years, addressing • Worldwide Sales, Application and R&D – Mobile Broadband – Broadcast • Own manufacturing facility – Aerospace & Defense • Partnering with leading external manufacturers – ISM – RF Energy Technologies & Products Customers • Broad LDMOSTaco and GaN technology portfolio Reinier Zwemstra Beltman • Comprehensive package line-up • Chief Operations Head of Sales OutstandingOfficer product consistency Amplify the future | 2 Ampleon and RF Energy • Recognized as thought leader • Co-founder of RF Energy Alliance • Working with the leaders in new application domains Amplify the future | 3 RF Power Industrial market dominated by vacuum tubes • Current solutions mainly based on ‘old’ vacuum tube principles • Somewhat fragmented market with large and many small vendors – TWT (Traveling Wave Tubes) – Klystron – Magnetrons – CFA (Crossed Field Amplifiers) – Gyrotrons Amplify the future | 4 2020 TAM VED’s about ~$1B $1.2B in 2014 TAM VEDS Source ABI research TWT 63% Klystron 17% Gyrotron 3% magnetron Cross Field 15% 2% Not included: domestic magnetrons, Aerospace market Amplify the future | 5 Solid state penetrates the -

Klystron Gun Arcing and Modulator Protection
SLAC-PUB-10435 KLYSTRON GUN ARCING AND MODULATOR PROTECTION S.L. Gold Stanford Linear Accelerator Center (SLAC), Menlo Park, CA USA Abstract The demand for 500 kV and 265 amperes peak to power an X-Band klystron brings up protection issues for klystron faults and the energy dumped into the arc from the modulator. This situation is made worse when more than one klystron will be driven from a single modulator, such as the existing schemes for running two and eight klystrons. High power pulsed klystrons have traditionally be powered by line type modulators which match the driving impedance with the load impedance and therefore current limit at twice the operating current. Multiple klystrons have the added problems of a lower modulator source impedance and added stray capacitance, which converts into appreciable energy at high voltages like 500kV. SLAC has measured the energy dumped into klystron arcs in a single and dual klystron configuration at the 400 to 450kV level and found interesting characteristics in the arc formation. The author will present measured data from klystron arcs powered from line-type modulators in several configurations. The questions arise as to how the newly designed solid-state modulators, running multiple tubes, will react to a klystron arc and how much energy will be dumped into the arc. 1. INTRODUCTION The amount of protection required for a gun arc or a defocused beam in a microwave tube is a continual source of controversy and debate. Historically, tube companies have set protection requirements by their own experience in test. Body current interception was thought to be limited to 10 joules maximum and shutdown within 10 microseconds.