A Personal Account on the Development of Stanley, the Robot
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Result Build a Self-Driving Network
SELF-DRIVING NETWORKS “LOOK, MA: NO HANDS” Kireeti Kompella CTO, Engineering Juniper Networks ITU FG Net2030 Geneva, Oct 2019 © 2019 Juniper Networks 1 Juniper Public VISION © 2019 Juniper Networks Juniper Public THE DARPA GRAND CHALLENGE BUILD A FULLY AUTONOMOUS GROUND VEHICLE IMPACT • Programmers, not drivers • No cops, lawyers, witnesses GOAL • Quadruple highway capacity Drive a pre-defined 240km course in the Mojave Desert along freeway I-15 • Glitches, insurance? • Ethical Self-Driving Cars? PRIZE POSSIBILITIES $1 Million RESULT 2004: Fail (best was less than 12km!) 2005: 5/23 completed it 2007: “URBAN CHALLENGE” Drive a 96km urban course following traffic regulations & dealing with other cars 6 cars completed this © 2019 Juniper Networks 3 Juniper Public GRAND RESULT: THE SELF-DRIVING CAR: (2009, 2014) No steering wheel, no pedals— a completely autonomous car Not just an incremental improvement This is a DISRUPTIVE change in automotive technology! © 2019 Juniper Networks 4 Juniper Public THE NETWORKING GRAND CHALLENGE BUILD A SELF-DRIVING NETWORK IMPACT • New skill sets required GOAL • New focus • BGP/IGP policies AI policy Self-Discover—Self-Configure—Self-Monitor—Self-Correct—Auto-Detect • Service config service design Customers—Auto-Provision—Self-Diagnose—Self-Optimize—Self-Report • Reactive proactive • Firewall rules anomaly detection RESULT Free up people to work at a higher-level: new service design and “mash-ups” POSSIBILITIES Agile, even anticipatory service creation Fast, intelligent response to security breaches CHALLENGE -

Stanley: the Robot That Won the DARPA Grand Challenge
STANLEY Winning the DARPA Grand Challenge with an AI Robot_ Michael Montemerlo, Sebastian Thrun, Hendrik Dahlkamp, David Stavens Stanford AI Lab, Stanford University 353 Serra Mall Stanford, CA 94305-9010 fmmde,thrun,dahlkamp,[email protected] Sven Strohband Volkswagen of America, Inc. Electronics Research Laboratory 4009 Miranda Avenue, Suite 150 Palo Alto, California 94304 [email protected] http://www.cs.stanford.edu/people/dstavens/aaai06/montemerlo_etal_aaai06.pdf Stanley: The Robot that Won the DARPA Grand Challenge Sebastian Thrun, Mike Montemerlo, Hendrik Dahlkamp, David Stavens, Andrei Aron, James Diebel, Philip Fong, John Gale, Morgan Halpenny, Gabriel Hoffmann, Kenny Lau, Celia Oakley, Mark Palatucci, Vaughan Pratt, and Pascal Stang Stanford Artificial Intelligence Laboratory Stanford University Stanford, California 94305 http://robots.stanford.edu/papers/thrun.stanley05.pdf DARPA Grand Challenge: Final Part 1 Stanley from Stanford 10.54 https://www.youtube.com/watch?v=M2AcMnfzpNg Sebastian Thrun helped build Google's amazing driverless car, powered by a very personal quest to save lives and reduce traffic accidents. 4 minutes https://www.ted.com/talks/sebastian_thrun_google_s_driverless_car THE GREAT ROBOT RACE – documentary Published on Jan 21, 2016 DARPA Grand Challenge—a raucous race for robotic, driverless vehicles sponsored by the Pentagon, which awards a $2 million purse to the winning team. Armed with artificial intelligence, laser-guided vision, GPS navigation, and 3-D mapping systems, the contenders are some of the world's most advanced robots. Yet even their formidable technology and mechanical prowess may not be enough to overcome the grueling 130-mile course through Nevada's desert terrain. From concept to construction to the final competition, "The Great Robot Race" delivers the absorbing inside story of clever engineers and their unyielding drive to create a champion, capturing the only aerial footage that exists of the Grand Challenge. -
An Off-Road Autonomous Vehicle for DARPA's Grand Challenge
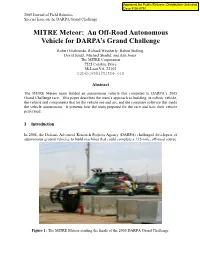
2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge MITRE Meteor: An Off-Road Autonomous Vehicle for DARPA’s Grand Challenge Robert Grabowski, Richard Weatherly, Robert Bolling, David Seidel, Michael Shadid, and Ann Jones. The MITRE Corporation 7525 Colshire Drive McLean VA, 22102 [email protected] Abstract The MITRE Meteor team fielded an autonomous vehicle that competed in DARPA’s 2005 Grand Challenge race. This paper describes the team’s approach to building its robotic vehicle, the vehicle and components that let the vehicle see and act, and the computer software that made the vehicle autonomous. It presents how the team prepared for the race and how their vehicle performed. 1 Introduction In 2004, the Defense Advanced Research Projects Agency (DARPA) challenged developers of autonomous ground vehicles to build machines that could complete a 132-mile, off-road course. Figure 1: The MITRE Meteor starting the finals of the 2005 DARPA Grand Challenge. 2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge 195 teams applied – only 23 qualified to compete. Qualification included demonstrations to DARPA and a ten-day National Qualifying Event (NQE) in California. The race took place on October 8 and 9, 2005 in the Mojave Desert over a course containing gravel roads, dirt paths, switchbacks, open desert, dry lakebeds, mountain passes, and tunnels. The MITRE Corporation decided to compete in the Grand Challenge in September 2004 by sponsoring the Meteor team. They believed that MITRE’s work programs and military sponsors would benefit from an understanding of the technologies that contribute to the DARPA Grand Challenge. -

A Survey of Autonomous Driving: Common Practices and Emerging Technologies
Accepted March 22, 2020 Digital Object Identifier 10.1109/ACCESS.2020.2983149 A Survey of Autonomous Driving: Common Practices and Emerging Technologies EKIM YURTSEVER1, (Member, IEEE), JACOB LAMBERT 1, ALEXANDER CARBALLO 1, (Member, IEEE), AND KAZUYA TAKEDA 1, 2, (Senior Member, IEEE) 1Nagoya University, Furo-cho, Nagoya, 464-8603, Japan 2Tier4 Inc. Nagoya, Japan Corresponding author: Ekim Yurtsever (e-mail: [email protected]). ABSTRACT Automated driving systems (ADSs) promise a safe, comfortable and efficient driving experience. However, fatalities involving vehicles equipped with ADSs are on the rise. The full potential of ADSs cannot be realized unless the robustness of state-of-the-art is improved further. This paper discusses unsolved problems and surveys the technical aspect of automated driving. Studies regarding present challenges, high- level system architectures, emerging methodologies and core functions including localization, mapping, perception, planning, and human machine interfaces, were thoroughly reviewed. Furthermore, many state- of-the-art algorithms were implemented and compared on our own platform in a real-world driving setting. The paper concludes with an overview of available datasets and tools for ADS development. INDEX TERMS Autonomous Vehicles, Control, Robotics, Automation, Intelligent Vehicles, Intelligent Transportation Systems I. INTRODUCTION necessary here. CCORDING to a recent technical report by the Eureka Project PROMETHEUS [11] was carried out in A National Highway Traffic Safety Administration Europe between 1987-1995, and it was one of the earliest (NHTSA), 94% of road accidents are caused by human major automated driving studies. The project led to the errors [1]. Against this backdrop, Automated Driving Sys- development of VITA II by Daimler-Benz, which succeeded tems (ADSs) are being developed with the promise of in automatically driving on highways [12]. -

Learning Maps for Indoor Mobile Robot Navigation
Learning Maps for Indoor Mobile Robot Navigation Sebastian Thrun Arno BÈucken April 1996 CMU-CS-96-121 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 The ®rst author is partly and the second author exclusively af®liated with the Computer Science Department III of the University of Bonn, Germany, where part of this research was carried out. This research is sponsored in part by the National Science Foundation under award IRI-9313367, and by the Wright Laboratory, Aeronautical Systems Center, Air Force Materiel Command, USAF, and the Advanced Research Projects Agency (ARPA) under grant number F33615-93-1-1330. The views and conclusionscontained in this documentare those of the author and should not be interpreted as necessarily representing of®cial policies or endorsements, either expressed or implied, of NSF, Wright Laboratory or the United States Government. Keywords: autonomous robots, exploration, mobile robots, neural networks, occupancy grids, path planning, planning, robot mapping, topological maps Abstract Autonomous robots must be able to learn and maintain models of their environ- ments. Research on mobile robot navigation has produced two major paradigms for mapping indoor environments: grid-based and topological. While grid-based methods produce accurate metric maps, their complexity often prohibits ef®cient planning and problem solving in large-scale indoor environments. Topological maps, on the other hand, can be used much more ef®ciently, yet accurate and consistent topological maps are considerably dif®cult to learn in large-scale envi- ronments. This paper describes an approach that integrates both paradigms: grid-based and topological. Grid-based maps are learned using arti®cial neural networks and Bayesian integration. -

Model Based Systems Engineering Approach to Autonomous Driving
DEGREE PROJECT IN ELECTRICAL ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2018 Model Based Systems Engineering Approach to Autonomous Driving Application of SysML for trajectory planning of autonomous vehicle SARANGI VEERMANI LEKAMANI KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE Author Sarangi Veeramani Lekamani [email protected] School of Electrical Engineering and Computer Science KTH Royal Institute of Technology Place for Project Sodertalje, Sweden AVL MTC AB Examiner Ingo Sander School of Electrical Engineering and Computer Science KTH Royal Institute of Technology Supervisor George Ungureanu School of Electrical Engineering and Computer Science KTH Royal Institute of Technology Industrial Supervisor Hakan Sahin AVL MTC AB Abstract Model Based Systems Engineering (MBSE) approach aims at implementing various processes of Systems Engineering (SE) through diagrams that provide different perspectives of the same underlying system. This approach provides a basis that helps develop a complex system in a systematic manner. Thus, this thesis aims at deriving a system model through this approach for the purpose of autonomous driving, specifically focusing on developing the subsystem responsible for generating a feasible trajectory for a miniature vehicle, called AutoCar, to enable it to move towards a goal. The report provides a background on MBSE and System Modeling Language (SysML) which is used for modelling the system. With this background, an MBSE framework for AutoCar is derived and the overall system design is explained. This report further explains the concepts involved in autonomous trajectory planning followed by an introduction to Robot Operating System (ROS) and its application for trajectory planning of the system. The report concludes with a detailed analysis on the benefits of using this approach for developing a system. -
Hierarchical Off-Road Path Planning and Its Validation Using a Scaled Autonomous Car' Angshuman Goswami Clemson University
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Clemson University: TigerPrints Clemson University TigerPrints All Theses Theses 12-2017 Hierarchical Off-Road Path Planning and Its Validation Using a Scaled Autonomous Car' Angshuman Goswami Clemson University Follow this and additional works at: https://tigerprints.clemson.edu/all_theses Recommended Citation Goswami, Angshuman, "Hierarchical Off-Road Path Planning and Its Validation Using a Scaled Autonomous Car'" (2017). All Theses. 2793. https://tigerprints.clemson.edu/all_theses/2793 This Thesis is brought to you for free and open access by the Theses at TigerPrints. It has been accepted for inclusion in All Theses by an authorized administrator of TigerPrints. For more information, please contact [email protected]. HIERARCHICAL OFF-ROAD PATH PLANNING AND ITS VALIDATION USING ASCALED AUTONOMOUS CAR A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science Mechanical Engineering by Angshuman Goswami December 2017 Accepted by: Dr. Ardalan Vahidi, Committee Chair Dr. John R. Wagner Dr. Phanindra Tallapragada Abstract In the last few years. while a lot of research efforthas been spent on autonomous vehicle navigation, primarily focused on on-road vehicles, off-road path planning still presents new challenges. Path planning for an autonomous ground vehicle over a large horizon in an unstructured environment when high-resolution a-priori information is available, is still very much an open problem due to the computations involved. Local- ization and control of an autonomous vehicle and how the control algorithms interact with the path planner is a complex task. -

Passenger Response to Driving Style in an Autonomous Vehicle
Passenger Response to Driving Style in an Autonomous Vehicle by Nicole Belinda Dillen A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of Mathematics in Computer Science Waterloo, Ontario, Canada, 2019 c Nicole Dillen 2019 I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I understand that my thesis may be made electronically available to the public. ii Abstract Despite rapid advancements in automated driving systems (ADS), current HMI research tends to focus more on the safety driver in lower level vehicles. That said, the future of automated driving lies in higher level systems that do not always require a safety driver to be present. However, passengers might not fully trust the capability of the ADS in the absence of a safety driver. Furthermore, while an ADS might have a specific set of parameters for its driving profile, passengers might have different driving preferences, some more defensive than others. Taking these preferences into consideration is, therefore, an important issue which can only be accomplished by understanding what makes a passenger uncomfortable or anxious. In order to tackle this issue, we ran a human study in a real-world autonomous vehicle. Various driving profile parameters were manipulated and tested in a scenario consisting of four different events. Physiological measurements were also collected along with self- report scores, and the combined data was analyzed using Linear Mixed-Effects Models. The magnitude of a response was found to be situation dependent: the presence and proximity of a lead vehicle significantly moderated the effect of other parameters. -

A Hierarchical Control System for Autonomous Driving Towards Urban Challenges
applied sciences Article A Hierarchical Control System for Autonomous Driving towards Urban Challenges Nam Dinh Van , Muhammad Sualeh , Dohyeong Kim and Gon-Woo Kim *,† Intelligent Robotics Laboratory, Department of Control and Robot Engineering, Chungbuk National University, Cheongju-si 28644, Korea; [email protected] (N.D.V.); [email protected] (M.S.); [email protected] (D.K.) * Correspondence: [email protected] † Current Address: Chungdae-ro 1, Seowon-Gu, Cheongju, Chungbuk 28644, Korea. Received: 23 April 2020; Accepted: 18 May 2020; Published: 20 May 2020 Abstract: In recent years, the self-driving car technologies have been developed with many successful stories in both academia and industry. The challenge for autonomous vehicles is the requirement of operating accurately and robustly in the urban environment. This paper focuses on how to efficiently solve the hierarchical control system of a self-driving car into practice. This technique is composed of decision making, local path planning and control. An ego vehicle is navigated by global path planning with the aid of a High Definition map. Firstly, we propose the decision making for motion planning by applying a two-stage Finite State Machine to manipulate mission planning and control states. Furthermore, we implement a real-time hybrid A* algorithm with an occupancy grid map to find an efficient route for obstacle avoidance. Secondly, the local path planning is conducted to generate a safe and comfortable trajectory in unstructured scenarios. Herein, we solve an optimization problem with nonlinear constraints to optimize the sum of jerks for a smooth drive. In addition, controllers are designed by using the pure pursuit algorithm and the scheduled feedforward PI controller for lateral and longitudinal direction, respectively. -

A Self-Supervised Terrain Roughness Estimator for Off-Road Autonomous
A Self-Supervised Terrain Roughness Estimator for O®-Road Autonomous Driving David Stavens and Sebastian Thrun Stanford Arti¯cial Intelligence Laboratory Computer Science Department Stanford, CA 94305-9010 fstavens,[email protected] Abstract 1 INTRODUCTION Accurate perception is a principal challenge In robotic autonomous o®-road driving, the primary of autonomous o®-road driving. Percep- perceptual problem is terrain assessment in front of tive technologies generally focus on obsta- the robot. For example, in the 2005 DARPA Grand cle avoidance. However, at high speed, ter- Challenge (DARPA, 2004), a robot competition orga- rain roughness is also important to control nized by the U.S. Government, robots had to identify shock the vehicle experiences. The accuracy drivable surface while avoiding a myriad of obstacles required to detect rough terrain is signi¯- { cli®s, berms, rocks, fence posts. To perform ter- cantly greater than that necessary for obsta- rain assessment, it is common practice to endow ve- cle avoidance. hicles with forward-pointed range sensors. Terrain is We present a self-supervised machine learn- then analyzed for potential obstacles. The result is ing approach for estimating terrain rough- used to adjust the direction of vehicle motion (Kelly ness from laser range data. Our approach & Stentz, 1998a; Kelly & Stentz, 1998b; Langer et al., compares sets of nearby surface points ac- 1994; Urmson et al., 2004). quired with a laser. This comparison is chal- lenging due to uncertainty. For example, at When driving at high speed { as in the DARPA Grand range, laser readings may be so sparse that Challenge { terrain roughness must also dictate vehicle signi¯cant information about the surface is behavior because rough terrain induces shock propor- missing. -

Porsche Automobil Holding SE Company Accounts 2008/2009
Porsche Automobil Holding SE company accounts 2008/09 4 Group management report and management report of Porsche Automobil Holding SE 80 Balance Sheet 81 Income statement 82 Notes 102 Audit Opinion 103 Company Boards 105 Membership in other statutory supervisory boards and comparable domestic and foreign control bodies Group management report and management report of Porsche Automobil Holding SE Recent developments Michael Macht and Thomas Edig's appointment to the helm of Porsche AG marks the beginning of a new era for the Stuttgart-based automobile manufacturer. Michael Macht, who for many years served as head of pro- duction and logistics, has been made a member of the executive board of Porsche SE, and CEO of Porsche AG. Thomas Edig has been made board member at Porsche SE and Mr. Macht’s deputy at Porsche AG, where he is also responsible for HR and social issues and functions as labor director. Macht’s successor as head of production is Wolfgang Leimgruber, who was previously responsible for the body shell and paint shops. At Porsche SE, Michael Macht is responsible for technology and products, while Tho- mas Edig heads the commercial and administrative side. On 23 July 2009, the supervisory board of Porsche Automobil Holding SE (“Porsche SE”) reached an agreement on the departure of the long-term executive board members Dr. Wendelin Wiedeking and Holger P. Härter. Both men also resigned from their posts on the supervisory boards of Volkswagen AG and AUDI AG. Prof. Dr. Martin Winterkorn will be made the new CEO of Porsche SE fol- lowing the approval of the supervisory boards of Porsche SE and Volks- wagen AG. -

Self-Driving Car Using Artificial Intelligence Prof
International Journal of Future Generation Communication and Networking Vol. 13, No. 3s, (2020), pp. 612–615 Self-Driving Car Using Artificial Intelligence Prof. S.R. Wategaonkar #1, Sujoy Bhattacharya*2, Shubham Bhitre*3 Prem Kumar Singh *4, Khushboo Bedse *5 #Professor and Project Faculty member, Department of Electronic and Telecommunication, Bharati Vidyapeeth’s College of Engineering, Navi Mumbai, Maharashtra, India. *Project Student, Department of Electronic and Telecommunication, Bharati Vidyapeeth’s College of Engineering, Navi Mumbai, Maharashtra, India. [email protected] [email protected] [email protected] [email protected] [email protected] Abstract Self-driving cars have the prospective to transform urban mobility by providing safe, convenient and congestion free transportability. This autonomous vehicle as an application of Artificial Intelligence (AI) have several difficulties like traffic light detection, lane end detection, pedestrian, signs etc. This problem can be overcome by using technologies such as Machine Learning (ML), Deep Learning (DL) and Image Processing. In this paper, author’s propose deep neural network for lane and traffic light detection. The model is trained and assessed using the dataset, which contains the front view image frames and the steering angle data captured when driving on the road. Keeping cars inside the lane is a very important feature of self-driving cars. It learns how to keep the vehicle in lane from human driving data. The paper presents Artificial Intelligence based autonomous navigation and obstacle avoidance of self-driving cars, applied with Deep Learning to a simulated cars in an urban environment. Keywords—Self-Driving car, Autonomous driving, Object Detection, Lane End Detection, Deep Learning, Traffic light Detection.