A Theory of Catadioptric Image Formation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A DESCRIPTION of FOUR FAST SLITLESS SPECTROGRAPHS by Gale A
A DESCRIPTION OF FOUR FAST SLITLESS SPECTROGRAPHS by Gale A. Hawey kngley Research Ceater Langley IStation, Hampton, Va. I .I NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTO 0CT.OBER 1967 , 8l .~ -. .y-; $. .Ir* *. r., \. ',r <'. /. ., ..., I 5,, 2 .,i c, . B TECH LIBRARY KAFB, NM . -- 0130742 NASA TN D-4145 A DESCRIPTION OF FOUR FAST SLITLESS SPECTROGRAPHS By Gale A. Harvey Langley Research Center Langley Station, Hampton, Va. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTl price $3.00 A DESCRIPTION OF FOUR FAST SLITLESS SPECTROGRAPHS By Gale A. Harvey Langley Research Center SUMMARY A description, comparison, and short discussion of four fast slitless spectrographs for use in low-light-level research are given. The spectrographs include three catadiop- tric systems, the Super Schmidt meteor camera, the Baby Schmidt, and the Maksutov and one refractive optical system, the Super Farron. The Baby Schmidt and the Maksutov systems have fused-silica transmission elements. Except for the Super Schmidt camera, which utilizes a light flint mosaic prism, all systems utilize objective transmission dif- fraction gratings. The four systems discussed have low-light-level spectroscopic recording capability, The Super Schmidt has the largest field, 57'; the Baby Schmidt and Maksutovs have the broadest effective spectral range (3200 angstroms to 9500 angstroms); and the Super Farron features the greatest versatility and portability. INTRODUCTION A spectrograph is an apparatus which effects dispersion of radiation for photo- graphic recording. A slitless spectrograph consists basically of a dispersion element, prism, or grating, placed over the entrance of a camera so that images or the radiation source rather than the entrance slit of the more customary slit spectrograph are formed. -

A Theory of Catadioptric Image Formation * Simon Baker and Shree K
A Theory of Catadioptric Image Formation * Simon Baker and Shree K. Nayar Department of Computer Science Columbia University New York, NY 10027 Abstract able is that it permits the generation of geometrically Conventional video cameras have limited fields of correct perspective images from the image(s) captured view which make them restrictive for certain applica- by the catadioptric cameras. These perspective images tions in computational vision. A catadioptric sensor can subsequently be processed using the vast array of uses a combination of lenses and mirrors placed in techniques developed in the field of computational vi- a carefully arranged configuration to capture a much sion which assume perspective projection. Moreover, if wider field of view. When designing a catadioptric sen- the image is to be presented to a human, as in [Peri sor, the shape of the mirror.(s) should ideally be selected and Nayar, 19971, it needs to be a perspective image in to ensure that the complete catadioptric system has a order to not appear distorted. single effective viewpoint. In this paper, we derive the In this paper, we begin in Section 2 by deriving the complete class of single-lens single-mirror catadioptric entire class of catadioptric systems with a single effec- sensors which have a single viewpoint and an expres- tive viewpoint and which are constructed just using a sion for the spatial resolution of a catadioptric sensor single conventional lens and a single mirror. As we will in terms of the resolution of the camera used to con- show, the 2-parameter family of mirrors which can be struct it. -

ALD13 Advanced Lens Design 13
Advanced Lens Design Lecture 13: Mirror systems 2013-01-21 Herbert Gross Winter term 2013 www.iap.uni-jena.de 2 Preliminary Schedule Paraxial optics, ideal lenses, optical systems, raytrace, 1 15.10. Introduction Zemax handling Basic principles, paraxial layout, thin lenses, transition to 2 22.10. Optimization I thick lenses, scaling, Delano diagram, bending 3 29.10. Optimization II merit function requirements, effectiveness of variables 4 05.11. Optimization III complex formulations, solves, hard and soft constraints zero operands, lens splitting, aspherization, cementing, lens 5 12.11. Structural modifications addition, lens removal Geometrical aberrations, wave aberrations, PSF, OTF, sine 6 19.11. Aberrations and performance condition, aplanatism, isoplanatism spherical correction with aspheres, Forbes approach, 7 26.11. Aspheres and freeforms distortion correction, freeform surfaces, optimal location of aspheres, several aspheres 8 03.12. Field flattening thick meniscus, plus-minus pairs, field lenses Achromatization, apochromatic correction, dialyt, Schupman 9 10.12. Chromatical correction principle, axial versus transversal, glass selection rules, burried surfaces 10 17.12. Special topics symmetry, sensitivity, anamorphotic lenses high NA systems, broken achromates, Merte surfaces, AC 11 07.01. Higher order aberrations meniscus lenses Advanced optimization local optimization, control of iteration, global approaches, 12 14.01. strategies growing requirements, AC-approach of Shafer 13 21.01. Mirror systems special aspects, bending of ray paths, catadioptric systems color correction, straylight suppression, third order 14 28.01. Diffractive elements aberrations 15 04.02. Tolerancing and adjustment tolerances, procedure, adjustment, compensators 3 Contents 1. General properties 2. Image orientation 3. Telescope systems 4. Further Examples 4 General Properties of Mirror Systems . -

Ritchey Chretien Telescope � Hyperbola Hyperbola
Last Lecture: Astronomical Optics ! 2. Fundamentals of Telescopes designs ! 2.1. Telescope types: refracting, reflecting ! OUTLINE: ! Shaping light into an image: first principles Telescopes for different wavelengths Telescope elements: lenses and mirrors ! Telescope types – refracting (lenses) – reflecting (mirrors) ! ! Keeping the image sharp on large telescopes: challenges !1 Astronomical Optics ! 2. Fundamentals of Telescope designs ! 2.2. Wide Field of View designs and aberration correction ! Outline, Key concepts: ! ! Importance of the location of focus and instruments ! Main reflecting telescope designs: – Newtonian (parabolic mirror) – Gregorian – Cassegrain – RC ! ! Wide field telescope designs, correctors ! Location of focus & instrument(s) is key to telescope design ! Telescopes are designed with instrument(s) in mind. ! Sometime, a specialized telescope + instrument are designed together. ! Subaru telescope (8.2m): location of the 4 telescope focii ! Location of focus & instrument ! A wide field of view requires a large beam, difficult to squeeze through relay optics (see Lagrange invariant) → prime focus is often preferred for wide field instruments, or very large central obstruction (OK if wide field is single purpose of telescope) Examples (next few slides): – PanSTARRS – LBT LBC – LSST ! Heavy large/heavy instruments, or instruments requiring outstanding stability cannot easily be mounted on the telescope tube → Nasmyth focus, or coude focus, preferred Examples: – Subaru HDS – HARPS (requires outstanding spectroscopic stability) ! IR instruments require minimal number of reflections to limit thermal emission from optics → Cassegrain focus is preferred Pan-STARRS : 1.8m diameter telescope, 3 deg. diameter FOV Large Binocular Telescope's wide field cameras 0.4 deg. on a side. If the cameras are the same for Pan-STARRS and LBC, which can form a deeper image? ! ! LBC requires (3/0.4)^2 pointings to survey the field Pan-STARRS gets in a single pointing. -

Atmospheric Refraction: a History
Atmospheric refraction: a history Waldemar H. Lehn and Siebren van der Werf We trace the history of atmospheric refraction from the ancient Greeks up to the time of Kepler. The concept that the atmosphere could refract light entered Western science in the second century B.C. Ptolemy, 300 years later, produced the first clearly defined atmospheric model, containing air of uniform density up to a sharp upper transition to the ether, at which the refraction occurred. Alhazen and Witelo transmitted his knowledge to medieval Europe. The first accurate measurements were made by Tycho Brahe in the 16th century. Finally, Kepler, who was aware of unusually strong refractions, used the Ptolemaic model to explain the first documented and recognized mirage (the Novaya Zemlya effect). © 2005 Optical Society of America OCIS codes: 000.2850, 010.4030. 1. Introduction the term catoptrics became reserved for reflection Atmospheric refraction, which is responsible for both only, and the term dioptrics was adopted to describe astronomical refraction and mirages, is a subject that the study of refraction.2 The latter name was still in is widely dispersed through the literature, with very use in Kepler’s time. few works dedicated entirely to its exposition. The same must be said for the history of refraction. Ele- ments of the history are scattered throughout numer- 2. Early Greek Theories ous references, many of which are obscure and not Aristotle (384–322 BC) was one of the first philoso- readily available. It is our objective to summarize in phers to write about vision. He considered that a one place the development of the concept of atmo- transparent medium such as air or water was essen- spheric refraction from Greek antiquity to the time of tial to transmit information to the eye, and that vi- Kepler, and its use to explain the first widely known sion in a vacuum would be impossible. -
Telescope & Instrument Fundamentals
Telescope & Instrument Fundamentals Luc Simard Astronomy 511 Spring 2018 Outline • Apertures, surfaces, stops and pupils • Aberrations and telescope designs • Imaging • Spectroscopy • Observing Strategies and Calibrations • Data Reduction What makes a good telescope site? • Number of clear and photometric nights (> 300) • Larger isoplanatic angle • Longer coherence time • Low water vapor content • Small pressure broadening (mid-IR) Hawaii and Chile are considered to be the best sites on Earth thanks to a combination of geographical factors. Do you know what they are? (Hint: Proximity to a beach is not one of them.) Collecting Area of the Large Telescopes (GTC) All 4-meter class primary mirrors are monolithic 8-10-meter class primary mirrors are either monolithic or segmented - dividing line is between 8 and 10 meters. Primary Aperture - Monolithic Gemini Magellan 1+2/LBT1+2/GMT Thin meniscus (thickness = 20 cm) Honeycomb (thickness = 80-110 cm) D = 8.1m D = 8.4m 120 actuators 1750 alumina silica cores (D = 20 cm) Lower mass = lower thermal inertia Total mass = 15% mass of a solid blank Primary Aperture - Segmented Keck TMT 36 hexagonal segments 492 hexagonal segments Diameter = 1.8 m (82 distinct segments) Thickness = 75 mm Diameter = 1.44 m Weight = 400 kg Thickness = 45 mm Gap = 3 mm Primary Aperture - “Diluteness” PSF PSF Large Binocular Telescope Giant Magellan Telescope PSF Monolithic, unobscured, PSF circular aperture VLT Interferometer Secondary Aperture - Conventional Optical Reflector Gemini Secondary D = 1.023m Central Hole D -
A Guide to Telescopes
A Guide to Telescopes How to choose the right telescope for you Telescopes What is a Telescope? A Telescope is an instrument that aids in the observation of remote objects by collecting electromagnetic radiation (such as visible light). The word "telescope" (from the Greek τῆλε, tele "far" and σκοπεῖν, skopein "to look or see"; τηλεσκόπος, teleskopos "far-seeing") was coined in 1611 by the Greek mathematician Giovanni Demisiani for one of Galileo Galilei’s instruments presented at a banquet at the Accademia dei Lincei Galileo had used the term "perspicillum". Optical Telescopes. An optical Telescope gathers and focuses light mainly from the visible part of the electromagnetic spectrum (although some work in the infrared and ultraviolet). Types of Optical Telescopes Refracting Telescopes (Dioptrics): Achromatic Apochromatic Binoculars Copyscope Galileoscope Monocular Non-Achromatic Superachromat Varifocal gas lens telescope Reflecting Telescopes (Catoptrics): Cassegrain telescope Gregorian telescope Herrig telescope Herschelian telescope Large liquid mirror telescope Newtonian o Dobsonian telescope Pfund telescope Schiefspiegler Stevick-Paul telescope Toroidal reflector / Yolo telescope Catadioptric Telescopes: Argunov-Cassegrain Catadioptric dialytes Klevzov-cassegrain telescope Lurie-Houghton telescope Maksutov telescope o Maksutov camera o Maksutov-Cassegrain telescope o Maksutov Newtonian telescope Modified Dall-Kirkham telescope Schmidt camera Refracting Telescopes: All refracting telescopes use the same principles. The combination of an objective lens 1 and some type of eyepiece 2 is used to gather more light than the human eye could collect on its own, focus it 5, and present the viewer with a brighter, clearer, and magnified virtual image 6. The objective in a refracting The objective in a refracting telescope refracts or bends light. -

Officina Stellare's Veloce RH200 Astrograph
S & T Test Report Dennis di Cicco Of!cina Stellare’s Veloce RH200 Astrograph WHAT WE LIKE: Ideal system for medium-field This 8-inch f/3 catadioptric system hits a lot of deep-sky imaging Superb image quality across sweet spots for today’s astrophotographers. large CCD chips Stable focus in changing tem- peratures The Veloce RH!""’s f/# focal ratio makes it a superb astrograph for imag- ing nebulae with narrowband filters. The author made this view of the WHAT WE DON’T LIKE: Rosette Nebula using SBIG’s new STT-$#"" camera; H-alpha, SII, and OIII Unusually heavy for its size; filters; and approximately ! hours of exposure through each filter. requires substantial mount ALL PHOTOS BY THE AUTHOR WITH ADDITIONAL IMAGE PROCESSING BY SEAN WALKER 60 April 2013 !"# $ %&'&!()*& With its dew W)*+, -,.*,/*01 imaging equipment a cap retracted, few years ago, I envisioned an astronomical Rip Van Win- the RH!"" is kle awakening from his !"-year snooze to discover a world not much longer of astrophotography unlike anything that existed when he than it is wide. dozed off. Digital cameras, computerized image process- But the dew cap ing, and new telescopes made specifically for astropho- must be fully tography were just some of the wonders he’d encounter. extended (seen below) when the Well, it’s time to dust off that literary conceit for use astrograph is again, because today’s awakening Rip would have even used, since the more new wonders to behold. And one that would surely dew cap’s front boggle his mind is Officina Stellare’s new Veloce RH!"", aperture forms a Riccardi-Honders !""-mm (%-inch) f/& astrograph. -

Hatsouth: a Global Network of Fully Automated Identical Wide-Field Telescopes1
PUBLICATIONS OF THE ASTRONOMICAL SOCIETY OF THE PACIFIC, 125:154–182, 2013 February © 2013. The Astronomical Society of the Pacific. All rights reserved. Printed in U.S.A. HATSouth: A Global Network of Fully Automated Identical Wide-Field Telescopes1 G. Á. BAKOS,2,3,4 Z. CSUBRY,2,3 K. PENEV,2,3 D. BAYLISS,5 A. JORDÁN,6 C. AFONSO,7 J. D. HARTMAN,2,3 T. HENNING,7 G. KOVÁCS,8 R. W. NOYES,3 B. BÉKY,3 V. S UC,6 B. CSÁK,7 M. RABUS,6 J. LÁZÁR,9 I. PAPP,9 P. SÁRI,9 P. C ONROY,5 G. ZHOU,5 P. D. SACKETT,5 B. SCHMIDT,5 L. MANCINI,7 D. D. SASSELOV,3 AND K. UELTZHOEFFER10 Received 2012 June 06; accepted 2012 December 11; published 2013 January 17 ABSTRACT. HATSouth is the world’s first network of automated and homogeneous telescopes that is capable of year-round 24 hr monitoring of positions over an entire hemisphere of the sky. The primary scientific goal of the network is to discover and characterize a large number of transiting extrasolar planets, reaching out to long periods and down to small planetary radii. HATSouth achieves this by monitoring extended areas on the sky, deriving high precision light curves for a large number of stars, searching for the signature of planetary transits, and confirming planetary candidates with larger telescopes. HATSouth employs six telescope units spread over three prime loca- tions with large longitude separation in the southern hemisphere (Las Campanas Observatory, Chile; HESS site, Namibia; Siding Spring Observatory, Australia). -

Design and Construction of a Refracting Telescope C
31102 C. I. Onah and C. M. Ogudo/ Elixir Materials Science 80 (2015) 31102-31108 Available online at www.elixirpublishers.com (Elixir International Journal) Materials Science Elixir Materials Science 80 (2015) 31102-31108 Design and construction of a refracting telescope C. I. Onah * and C. M. Ogudo Department of Physics, Federal University of Technology, Owerri, Nigeria. ARTICLE INFO ABSTRACT Article history: Most people see the telescope as the things for the movies, the science geeks and the rich Received: 29 August 2014; and affluent, but are these feelings for real? This paper on the design and construction of an Received in revised form: optical refracting telescope which is aimed at producing a low cost and portable telescope 28 February 2015; with less or no aberration effects using the materials we see around us every day goes a long Accepted: 14 March 2015; way to answer the question that the telescope is for everybody that loves astronomy. Overall implementation of this work involves knowledge of the physics of optics; lenses to be Keywords precise. As a case study I used a double convex lens and the eyepiece of a microscope for Telescope, the construction of the mini refractor telescope, my hypothesis is that using a double convex Astronomy and General Physics. is better than using a Plano-convex because the two curved surfaces will cancel out the aberration effect of the individual sides. The resultant telescope was tested during the night and during the day and was used to focus objects at a distance of about 50m from the person with less aberration effect. -
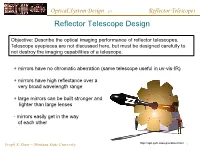
Optical System Design – S15 Reflector Telescopes Reflector Telescope Design
Optical System Design – S15 Reflector Telescopes Reflector Telescope Design Objective: Describe the optical imaging performance of reflector telescopes. Telescope eyepieces are not discussed here, but must be designed carefully to not destroy the imaging capabilities of a telescope. + mirrors have no chromatic aberration (same telescope useful in uv-vis-IR) + mirrors have high reflectance over a very broad wavelength range + large mirrors can be built stronger and lighter than large lenses - mirrors easily get in the way of each other Joseph A. Shaw – Montana State University http://ngst.gsfc.nasa.gov/about.html 1 Optical System Design – S15 Reflector Telescopes Surface sag “sag” is the optical term for the shape of a surface that deviates from flat. 휌 2 2 Sag = 푅 − 푅2 − 휌2 = 푅 − 푅 1 − 푅 R r 2 2 휌 휌 푅2 − 푦2 Sag ≅ 푅 − 푅 1 − = sag 2푅2 2푅 휌2 Sag ≅ 2푅 …parabolic approximation of the sag of a spherical surface… Joseph A. Shaw – Montana State University Refs: J. M. Geary, Intro to Lens Design with practical Zemax examples, pp. 22-23. 2 Optical System Design – S15 Reflector Telescopes Conic Sections Joseph A. Shaw – Montana State University 3 Optical System Design – S15 Reflector Telescopes Conics A conic is a surface of revolution formed by spinning a conic section around the axis. 2 2 Equation for a conic centered on the z axis: r 2 Rz (k 1)z 0 r = radial coordinate ( r 2 x 2 y 2 ) R = vertex radius of curvature, k = conic constant. All conics satisfy Fermat’s principle (that is, have perfect imaging) at 2 conjugate points. -
Loose, Patrice Koelsch All Rights Reserved ROGER BACON on PERCEPTION: a RECONSTRUCTION
INFORMATION TO USERS This was produced from a copy of a document sent to us for microfilming. While the most advanced technological means to photograph and reproduce this document have been used, the quality is heavily dependent upon the quality of the material subm itted. The following explanation of techniques is provided to help you understand markings or notations which may appear on this reproduction. 1. The sign or “target” for pages apparently lacking from the document photographed is “Missing Page(s)”. If it was possible to obtain the missing page(s) or section, they are spliced into the film along with adjacent pages. This may have necessitated cutting through an image and duplicating adjacent pages to assure you of complete continuity. 2. When an image on the film is obliterated with a round black mark it is an indication that the film inspector noticed either blurred copy because of movement during exposure, or duplicate copy. Unless we meant to delete copyrighted materials that should not have been filmed, you will find a good image of the page in the adjacent frame. 3. When a map, drawing or chart, etc., is part of the material being photo graphed the photographer has followed a definite method in “sectioning” the material. It is customary to begin filming at the upper left hand corner of a large sheet and to continue from left to right in equal sections with small overlaps. If necessary, sectioning is continued again—beginning below the first row and continuing on until complete. 4. For any illustrations that cannot be reproduced satisfactorily by xerography, photographic prints can be purchased at additional cost and tipped into your xerographic copy.