A Theory of Catadioptric Image Formation * Simon Baker and Shree K
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A DESCRIPTION of FOUR FAST SLITLESS SPECTROGRAPHS by Gale A
A DESCRIPTION OF FOUR FAST SLITLESS SPECTROGRAPHS by Gale A. Hawey kngley Research Ceater Langley IStation, Hampton, Va. I .I NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTO 0CT.OBER 1967 , 8l .~ -. .y-; $. .Ir* *. r., \. ',r <'. /. ., ..., I 5,, 2 .,i c, . B TECH LIBRARY KAFB, NM . -- 0130742 NASA TN D-4145 A DESCRIPTION OF FOUR FAST SLITLESS SPECTROGRAPHS By Gale A. Harvey Langley Research Center Langley Station, Hampton, Va. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTl price $3.00 A DESCRIPTION OF FOUR FAST SLITLESS SPECTROGRAPHS By Gale A. Harvey Langley Research Center SUMMARY A description, comparison, and short discussion of four fast slitless spectrographs for use in low-light-level research are given. The spectrographs include three catadiop- tric systems, the Super Schmidt meteor camera, the Baby Schmidt, and the Maksutov and one refractive optical system, the Super Farron. The Baby Schmidt and the Maksutov systems have fused-silica transmission elements. Except for the Super Schmidt camera, which utilizes a light flint mosaic prism, all systems utilize objective transmission dif- fraction gratings. The four systems discussed have low-light-level spectroscopic recording capability, The Super Schmidt has the largest field, 57'; the Baby Schmidt and Maksutovs have the broadest effective spectral range (3200 angstroms to 9500 angstroms); and the Super Farron features the greatest versatility and portability. INTRODUCTION A spectrograph is an apparatus which effects dispersion of radiation for photo- graphic recording. A slitless spectrograph consists basically of a dispersion element, prism, or grating, placed over the entrance of a camera so that images or the radiation source rather than the entrance slit of the more customary slit spectrograph are formed. -

ALD13 Advanced Lens Design 13
Advanced Lens Design Lecture 13: Mirror systems 2013-01-21 Herbert Gross Winter term 2013 www.iap.uni-jena.de 2 Preliminary Schedule Paraxial optics, ideal lenses, optical systems, raytrace, 1 15.10. Introduction Zemax handling Basic principles, paraxial layout, thin lenses, transition to 2 22.10. Optimization I thick lenses, scaling, Delano diagram, bending 3 29.10. Optimization II merit function requirements, effectiveness of variables 4 05.11. Optimization III complex formulations, solves, hard and soft constraints zero operands, lens splitting, aspherization, cementing, lens 5 12.11. Structural modifications addition, lens removal Geometrical aberrations, wave aberrations, PSF, OTF, sine 6 19.11. Aberrations and performance condition, aplanatism, isoplanatism spherical correction with aspheres, Forbes approach, 7 26.11. Aspheres and freeforms distortion correction, freeform surfaces, optimal location of aspheres, several aspheres 8 03.12. Field flattening thick meniscus, plus-minus pairs, field lenses Achromatization, apochromatic correction, dialyt, Schupman 9 10.12. Chromatical correction principle, axial versus transversal, glass selection rules, burried surfaces 10 17.12. Special topics symmetry, sensitivity, anamorphotic lenses high NA systems, broken achromates, Merte surfaces, AC 11 07.01. Higher order aberrations meniscus lenses Advanced optimization local optimization, control of iteration, global approaches, 12 14.01. strategies growing requirements, AC-approach of Shafer 13 21.01. Mirror systems special aspects, bending of ray paths, catadioptric systems color correction, straylight suppression, third order 14 28.01. Diffractive elements aberrations 15 04.02. Tolerancing and adjustment tolerances, procedure, adjustment, compensators 3 Contents 1. General properties 2. Image orientation 3. Telescope systems 4. Further Examples 4 General Properties of Mirror Systems . -

Ritchey Chretien Telescope � Hyperbola Hyperbola
Last Lecture: Astronomical Optics ! 2. Fundamentals of Telescopes designs ! 2.1. Telescope types: refracting, reflecting ! OUTLINE: ! Shaping light into an image: first principles Telescopes for different wavelengths Telescope elements: lenses and mirrors ! Telescope types – refracting (lenses) – reflecting (mirrors) ! ! Keeping the image sharp on large telescopes: challenges !1 Astronomical Optics ! 2. Fundamentals of Telescope designs ! 2.2. Wide Field of View designs and aberration correction ! Outline, Key concepts: ! ! Importance of the location of focus and instruments ! Main reflecting telescope designs: – Newtonian (parabolic mirror) – Gregorian – Cassegrain – RC ! ! Wide field telescope designs, correctors ! Location of focus & instrument(s) is key to telescope design ! Telescopes are designed with instrument(s) in mind. ! Sometime, a specialized telescope + instrument are designed together. ! Subaru telescope (8.2m): location of the 4 telescope focii ! Location of focus & instrument ! A wide field of view requires a large beam, difficult to squeeze through relay optics (see Lagrange invariant) → prime focus is often preferred for wide field instruments, or very large central obstruction (OK if wide field is single purpose of telescope) Examples (next few slides): – PanSTARRS – LBT LBC – LSST ! Heavy large/heavy instruments, or instruments requiring outstanding stability cannot easily be mounted on the telescope tube → Nasmyth focus, or coude focus, preferred Examples: – Subaru HDS – HARPS (requires outstanding spectroscopic stability) ! IR instruments require minimal number of reflections to limit thermal emission from optics → Cassegrain focus is preferred Pan-STARRS : 1.8m diameter telescope, 3 deg. diameter FOV Large Binocular Telescope's wide field cameras 0.4 deg. on a side. If the cameras are the same for Pan-STARRS and LBC, which can form a deeper image? ! ! LBC requires (3/0.4)^2 pointings to survey the field Pan-STARRS gets in a single pointing. -
Telescope & Instrument Fundamentals
Telescope & Instrument Fundamentals Luc Simard Astronomy 511 Spring 2018 Outline • Apertures, surfaces, stops and pupils • Aberrations and telescope designs • Imaging • Spectroscopy • Observing Strategies and Calibrations • Data Reduction What makes a good telescope site? • Number of clear and photometric nights (> 300) • Larger isoplanatic angle • Longer coherence time • Low water vapor content • Small pressure broadening (mid-IR) Hawaii and Chile are considered to be the best sites on Earth thanks to a combination of geographical factors. Do you know what they are? (Hint: Proximity to a beach is not one of them.) Collecting Area of the Large Telescopes (GTC) All 4-meter class primary mirrors are monolithic 8-10-meter class primary mirrors are either monolithic or segmented - dividing line is between 8 and 10 meters. Primary Aperture - Monolithic Gemini Magellan 1+2/LBT1+2/GMT Thin meniscus (thickness = 20 cm) Honeycomb (thickness = 80-110 cm) D = 8.1m D = 8.4m 120 actuators 1750 alumina silica cores (D = 20 cm) Lower mass = lower thermal inertia Total mass = 15% mass of a solid blank Primary Aperture - Segmented Keck TMT 36 hexagonal segments 492 hexagonal segments Diameter = 1.8 m (82 distinct segments) Thickness = 75 mm Diameter = 1.44 m Weight = 400 kg Thickness = 45 mm Gap = 3 mm Primary Aperture - “Diluteness” PSF PSF Large Binocular Telescope Giant Magellan Telescope PSF Monolithic, unobscured, PSF circular aperture VLT Interferometer Secondary Aperture - Conventional Optical Reflector Gemini Secondary D = 1.023m Central Hole D -

Officina Stellare's Veloce RH200 Astrograph
S & T Test Report Dennis di Cicco Of!cina Stellare’s Veloce RH200 Astrograph WHAT WE LIKE: Ideal system for medium-field This 8-inch f/3 catadioptric system hits a lot of deep-sky imaging Superb image quality across sweet spots for today’s astrophotographers. large CCD chips Stable focus in changing tem- peratures The Veloce RH!""’s f/# focal ratio makes it a superb astrograph for imag- ing nebulae with narrowband filters. The author made this view of the WHAT WE DON’T LIKE: Rosette Nebula using SBIG’s new STT-$#"" camera; H-alpha, SII, and OIII Unusually heavy for its size; filters; and approximately ! hours of exposure through each filter. requires substantial mount ALL PHOTOS BY THE AUTHOR WITH ADDITIONAL IMAGE PROCESSING BY SEAN WALKER 60 April 2013 !"# $ %&'&!()*& With its dew W)*+, -,.*,/*01 imaging equipment a cap retracted, few years ago, I envisioned an astronomical Rip Van Win- the RH!"" is kle awakening from his !"-year snooze to discover a world not much longer of astrophotography unlike anything that existed when he than it is wide. dozed off. Digital cameras, computerized image process- But the dew cap ing, and new telescopes made specifically for astropho- must be fully tography were just some of the wonders he’d encounter. extended (seen below) when the Well, it’s time to dust off that literary conceit for use astrograph is again, because today’s awakening Rip would have even used, since the more new wonders to behold. And one that would surely dew cap’s front boggle his mind is Officina Stellare’s new Veloce RH!"", aperture forms a Riccardi-Honders !""-mm (%-inch) f/& astrograph. -

Hatsouth: a Global Network of Fully Automated Identical Wide-Field Telescopes1
PUBLICATIONS OF THE ASTRONOMICAL SOCIETY OF THE PACIFIC, 125:154–182, 2013 February © 2013. The Astronomical Society of the Pacific. All rights reserved. Printed in U.S.A. HATSouth: A Global Network of Fully Automated Identical Wide-Field Telescopes1 G. Á. BAKOS,2,3,4 Z. CSUBRY,2,3 K. PENEV,2,3 D. BAYLISS,5 A. JORDÁN,6 C. AFONSO,7 J. D. HARTMAN,2,3 T. HENNING,7 G. KOVÁCS,8 R. W. NOYES,3 B. BÉKY,3 V. S UC,6 B. CSÁK,7 M. RABUS,6 J. LÁZÁR,9 I. PAPP,9 P. SÁRI,9 P. C ONROY,5 G. ZHOU,5 P. D. SACKETT,5 B. SCHMIDT,5 L. MANCINI,7 D. D. SASSELOV,3 AND K. UELTZHOEFFER10 Received 2012 June 06; accepted 2012 December 11; published 2013 January 17 ABSTRACT. HATSouth is the world’s first network of automated and homogeneous telescopes that is capable of year-round 24 hr monitoring of positions over an entire hemisphere of the sky. The primary scientific goal of the network is to discover and characterize a large number of transiting extrasolar planets, reaching out to long periods and down to small planetary radii. HATSouth achieves this by monitoring extended areas on the sky, deriving high precision light curves for a large number of stars, searching for the signature of planetary transits, and confirming planetary candidates with larger telescopes. HATSouth employs six telescope units spread over three prime loca- tions with large longitude separation in the southern hemisphere (Las Campanas Observatory, Chile; HESS site, Namibia; Siding Spring Observatory, Australia). -
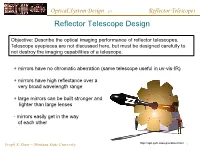
Optical System Design – S15 Reflector Telescopes Reflector Telescope Design
Optical System Design – S15 Reflector Telescopes Reflector Telescope Design Objective: Describe the optical imaging performance of reflector telescopes. Telescope eyepieces are not discussed here, but must be designed carefully to not destroy the imaging capabilities of a telescope. + mirrors have no chromatic aberration (same telescope useful in uv-vis-IR) + mirrors have high reflectance over a very broad wavelength range + large mirrors can be built stronger and lighter than large lenses - mirrors easily get in the way of each other Joseph A. Shaw – Montana State University http://ngst.gsfc.nasa.gov/about.html 1 Optical System Design – S15 Reflector Telescopes Surface sag “sag” is the optical term for the shape of a surface that deviates from flat. 휌 2 2 Sag = 푅 − 푅2 − 휌2 = 푅 − 푅 1 − 푅 R r 2 2 휌 휌 푅2 − 푦2 Sag ≅ 푅 − 푅 1 − = sag 2푅2 2푅 휌2 Sag ≅ 2푅 …parabolic approximation of the sag of a spherical surface… Joseph A. Shaw – Montana State University Refs: J. M. Geary, Intro to Lens Design with practical Zemax examples, pp. 22-23. 2 Optical System Design – S15 Reflector Telescopes Conic Sections Joseph A. Shaw – Montana State University 3 Optical System Design – S15 Reflector Telescopes Conics A conic is a surface of revolution formed by spinning a conic section around the axis. 2 2 Equation for a conic centered on the z axis: r 2 Rz (k 1)z 0 r = radial coordinate ( r 2 x 2 y 2 ) R = vertex radius of curvature, k = conic constant. All conics satisfy Fermat’s principle (that is, have perfect imaging) at 2 conjugate points. -

A Theory of Catadioptric Image Formation
A Theory of Catadioptric Image Formation Shree K Nayar and Simon Baker Technical Rep ort CUCS Department of Computer Science Columbia University New York NY Email fnayarsimonbgcscolumbiaedu Abstract Conventional video cameras have limited elds of view whichmake them restrictive for certain applications in computational vision A catadioptric sensor uses acombination of lenses and mirrors placed in a carefully arranged conguration to capture a muchwider eld of view When designing a catadioptric sensor the shap e of the mirrors should ideally b e selected to ensure that the complete catadioptric system has a single eective viewp oint The reason a single viewp oint is so desirable is that it is a requirement for the generation of pure p ersp ective images from the sensed images In this pap er we derive and analyze the complete class of singlelens singlemirror catadioptric sensors which satisfy the xed viewp oint constraint Some of the solutions turn out to be degenerate with no practical value while other solutions lead to realizable sensors We also derive an expression for the spatial resolution of a catadioptric sensor and include a preliminary analysis of the defo cus blur caused by the use of a curved mirror Keywords Image formation sensor design sensor resolution defo cus blur Intro duction Many applications in computational vision require that a large eld of view is imaged Examples include surveillance teleconferencing and mo del acquisition for virtual reality Moreover a number of other applications such as egomotion estimation and -
ICSO 2006 Suited for the Production of Many Identical Mirrors
LARGE APERTURE AND WIDE FIELD OF VIEW SPACE TELESCOPE FOR THE DETECTION OF ULTRA HIGH ENERGY COSMIC RAYS AND NEUTRINOS Piero Mazzinghi(1), Vojko Bratina(1), Lisa Gambicorti(1,2), Francesca Simonetti(1), Alessandro Zuccaro Marchi(1) (1)National Institute of Applied Optics (INOA-CNR), Largo E. Fermi, 6 – 50125 Firenze, Italy (2)Dept. of Astronomy and Space Science, Florence University, Largo E. Fermi, 2 – 50125 Firenze, Italy Emails: [email protected], [email protected], [email protected], [email protected], [email protected] ABSTRACT deployed on the ground over many square kilometres [2] [3], observing a small portion of the sky. However, New technologies are proposed for large aperture and the flux of UHECRs above 1019 eV is low, and the rate wide Field of View (FOV) space telescopes dedicated of detectable neutrinos is far less. The ground-based to detection of Ultra High Energy Cosmic Rays and observatories have detected so far only a few dozens of Neutrinos flux, through observation of fluorescence events, representing a poor statistic. traces in atmosphere and diffused ýerenkov signals. Because of unforeseeable origin directions and faint The presented advanced detection system is a available signal, an EAS observatory would benefit if spaceborne LEO telescope, with better performance lifted to space, since it would allow an inspection of a than ground-based observatories, detecting up to 103- bigger atmospheric target, thus providing a wider 104 events/year. Different design approaches are statistic. Such a space-borne telescope must be ideated implemented, all with very large FOV and focal with new instrumentation providing large Field of surface detectors with sufficient segmentation and time View (FOV) and aperture in order to increase the resolution to allow precise reconstructions of the probability of detection. -
A Theory of Catadioptric Image Formation
A Theory of Catadioptric Image Formation Shree K. Nayar and Simon Baker Technical Rep ort CUCS-015-97 Department of Computer Science Columbia University New York, NY 10027 Email: fnayar,[email protected] Abstract Conventional video cameras have limited elds of view which make them restrictive for certain applications in computational vision. A catadioptric sensor uses a combination of lenses and mirrors placed in a carefully arranged con guration to capture a much wider eld of view. When designing a catadioptric sensor, the shap e of the mirrors should ideally b e selected to ensure that the complete catadioptric system has a single e ective viewp oint. The reason a single viewp oint is so desirable is that it is a requirement for the generation of pure p ersp ective images from the sensed images. In this pap er, we derive and analyze the complete class of single-lens single-mirror catadioptric sensors which satisfy the xed viewp oint constraint. Some of the solutions turn out to be degenerate with no practical value, while other solutions lead to realizable sensors. We also derive an expression for the spatial resolution of a catadioptric sensor, and include a preliminary analysis of the defo cus blur caused by the use of a curved mirror. Keywords: Image formation, sensor design, sensor resolution, defo cus blur. 1 Intro duction Many applications in computational vision require that a large eld of view is imaged. Examples include surveillance, teleconferencing, and mo del acquisition for virtual reality. Moreover, a number of other applications, such as ego-motion estimation and tracking, could b ene t from enhanced elds of view. -
A Buyer's and User's Guide to Astronomical Telescopes And
James Mullaney A Buyer’s and User’s Guide to Astronomical Telescopes and Binoculars Second Edition The Patrick Moore The Patrick Moore Practical Astronomy Series For further volumes: http://www.springer.com/series/3192 A Buyer’s and User’s Guide to Astronomical Telescopes and Binoculars James Mullaney Second Edition James Mullaney, F.R.A.S. Rehoboth Beach , DE , USA ISSN 1431-9756 ISBN 978-1-4614-8732-6 ISBN 978-1-4614-8733-3 (eBook) DOI 10.1007/978-1-4614-8733-3 Springer New York Heidelberg Dordrecht London Library of Congress Control Number: 2013949156 1st edition: © Springer-Verlag London Limited 2007 2nd edition: © Springer Science+Business Media New York 2014 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, speci fi cally the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on micro fi lms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied speci fi cally for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this publication or parts thereof is permitted only under the provisions of the Copyright Law of the Publisher’s location, in its current version, and permission for use must always be obtained from Springer. Permissions for use may be obtained through RightsLink at the Copyright Clearance Center. -

Choosing a Telescope
CHOOSING A TELESCOPE There was a time when the choice among telescopes was simple, even if the instruments themselves were heavy and awkward to use. Today the conflicting claims of the manufacturers of so many different telescopes make it difficult to discriminate among them. In this paper we discuss the chief types of commercially available telescopes and suggest why the Questar® is a unique solution to this opportunity of choice. REFRACTING TELESCOPES Refracting optical systems are either achromatic or apochromatic; the first brings two colors to a common focal plane and the second brings three. The major weaknesses of refracting telescopes are the result of their long destabilizing barrel length and their significant chromatic aberration. Both achromatic and apochromatic optical systems have a destructive effect on the ability to create images of high quality. The classic solution is to increase the focal length in order to reduce secondary color. This is a poor solution for the amateur astronomer; it increases the barrel length, which, in turn, demands a heavy and expensive mounting. Therefore, it is difficult to transport and assemble. In the past few years advances in materials technology with the development of low dispersion and fluorite glasses allow manufactures to improve chromatic aberration to about one eighth (⅛th) the aberration of an achromat and, at the same time, reduce the barrel length by about one half (½). The materials used in a modern apochromat optical system are very fragile. Fluorite has a crystalline structure which is prone to fracture. Such material cannot be heated to the temperatures required to deposit magnesium fluoride or dielectric coatings, and, instead, is "cold-coated" with a far less permanent result or even left uncoated as the interior surfaces often are.