Design of a Cryogenic Turbine for a Hybrid Cryocooler
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Analysis of the Brayton Cycle As a Cryogenic Refrigerator
jbrary, E-01 Admin. BJdg. OCT 7 1968 NBS 366 An Analysis of the Brayton Cycle As a Cryogenic Refrigerator ITATIONAL BURSAL' OF iTANDABD8 LIBRABT MAR 6 J973 V* 0F c J* 0a <5 Q \ v S. DEPARTMENT OF COMMERCE in Q National Bureau of Standards %. *^CAU 0? * : NATIONAL BUREAU OF STANDARDS The National Bureau of Standards 1 was established by an act of Congress March 3, 1901. Today, in addition to serving as the Nation's central measurement laboratory, the Bureau is a principal focal point in the Federal Government for assuring maxi- mum application of the physical and engineering sciences to the advancement of tech- nology in industry and commerce. To this end the Bureau conducts research and provides central national services in three broad program areas and provides cen- tral national services in a fourth. These are: (1) basic measurements and standards, (2) materials measurements and standards, (3) technological measurements and standards, and (4) transfer of technology. The Bureau comprises the Institute for Basic Standards, the Institute for Materials Research, the Institute for Applied Technology, and the Center for Radiation Research. THE INSTITUTE FOR BASIC STANDARDS provides the central basis within the United States of a complete and consistent system of physical measurement, coor- dinates that system with the measurement systems of other nations, and furnishes essential services leading to accurate and uniform physical measurements throughout the Nation's scientific community, industry, and commerce. The Institute consists of an Office of Standard Reference Data and a group of divisions organized by the following areas of science and engineering Applied Mathematics—Electricity—Metrology—Mechanics—Heat—Atomic Phys- 2 2 ics—Cryogenics-—Radio Physics-—Radio Engineering —Astrophysics —Time and Frequency. -

A Turbo-Brayton Cryocooler for Future European Observation Satellite Generation
C19_078 1 A Turbo-Brayton Cryocooler for Future European Observation Satellite Generation J. Tanchon1, J. Lacapere1, A. Molyneaux2, M. Harris2, S. Hill2, S.M. Abu-Sharkh2, T. Tirolien3 1Absolut System SAS, Seyssinet-Pariset, France 2Ofttech, Gloucester, United Kingdom 3European Space Agency, Noordwijk, The Netherlands ABSTRACT Several types of active cryocoolers have been developed for space and military applications in the last ten years. Performances and reliability continuously increase to follow the requirements evolution of new generations of satellite: less power consumption, more cooling capacity, increased life duration. However, in addition to this increase of performances and reliability, the microvibrations re- quirement becomes critical. In fact, with the development of vibration-free technologies, classical Earth Observation cryocoolers (Stirling, Pulse Tube) will become the main source of microvibra- tions on-board the satellite. A new generation cryocooler is being developed at Absolut System using very high speed turbomachines in order to avoid any generated perturbations below 1000 Hz. This development is performed in the frame of ESA Technical Research Program - 4000113495/15/NL/KML. This paper presents the status of this development project based on Reverse Brayton cycle with very high speed turbomachines. INTRODUCTION The space cryogenics sector is characterized by a large number of applications (detection, im- aging, sample conservation, propulsion, telecommunications etc.) that lead to various requirements (temperature range, microvibration, lifetime, power consumption etc.) that can be met by different solutions (Stirling or JT coolers, mechanical or sorption compressors etc.). The recent years saw, in Europe, the developments of coolers to meet Earth Observation mission UHTXLUHPHQWVWKDWDUHFDSDEOHWRSURYLGHVLJQL¿FDQWFRROLQJSRZHUDWDQRSHUDWLRQDOWHPSHUDWXUH around 50K (for IR detection). -

First and Second Law Evaluation of Combined Brayton-Organic Rankine Power Cycle
Journal of Thermal Engineering, Vol. 6, No. 4, pp. 577-591, July, 2020 Yildiz Technical University Press, Istanbul, Turkey FIRST AND SECOND LAW EVALUATION OF COMBINED BRAYTON-ORGANIC RANKINE POWER CYCLE Önder Kaşka1, Onur Bor2, Nehir Tokgöz3* Muhammed Murat Aksoy4 ABSTRACT In the present work, we have conducted thermodynamic analysis of an organic Rankine cycle (ORC) using waste heat from intercooler and regenerator in Brayton cycle with intercooling, reheating, and regeneration (BCIRR). First of all, the first law analysis is used in this combined cycle. Several outputs are revealed in this study such as the cycle efficiencies in Brayton cycle which is dependent on turbine inlet temperature, intercooler pressure ratios, and pinch point temperature difference. For all cycles, produced net power is increased because of increasing turbine inlet temperature. Since heat input to the cycles takes place at high temperatures, the produced net power is increased because of increasing turbine inlet temperature for all cycles. The thermal efficiency of combined cycle is higher about 11.7% than thermal efficiency of Brayton cycle alone. Moreover, the net power produced by ORC has contributed nearly 28650 kW. The percentage losses of exergy for pump, turbine, condenser, preheater I, preheater II, and evaporator are 0.33%, 33%, 22%, 23%, 6%, and16% respectively. The differences of pinch point temperature on ORC net power and efficiencies of ORC are investigated. In addition, exergy efficiencies of components with respect to intercooling pressure ratio and evaporator effectiveness is presented. Exergy destructions are calculated for all the components in ORC. Keywords: Brayton Cycle, Organic Rankine Cycle, Bottoming Cycle, Pinch Point Temperature, Waste Heat, Energy and Exergy Analysis INTRODUCTION Thermal energy systems as well as corresponding all parts have been challenged to improve overall efficiency due to lack of conventional fuels, reduce climate change and so on for recent years. -

Supercritical Carbon Dioxide(S-CO2) Power Cycle for Waste Heat Recovery: a Review from Thermodynamic Perspective
processes Review Supercritical Carbon Dioxide(s-CO2) Power Cycle for Waste Heat Recovery: A Review from Thermodynamic Perspective Liuchen Liu, Qiguo Yang and Guomin Cui * School of Energy and Power Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China; [email protected] (L.L.); [email protected] (Q.Y.) * Correspondence: [email protected] Received: 11 October 2020; Accepted: 13 November 2020; Published: 15 November 2020 Abstract: Supercritical CO2 power cycles have been deeply investigated in recent years. However, their potential in waste heat recovery is still largely unexplored. This paper presents a critical review of engineering background, technical challenges, and current advances of the s-CO2 cycle for waste heat recovery. Firstly, common barriers for the further promotion of waste heat recovery technology are discussed. Afterwards, the technical advantages of the s-CO2 cycle in solving the abovementioned problems are outlined by comparing several state-of-the-art thermodynamic cycles. On this basis, current research results in this field are reviewed for three main applications, namely the fuel cell, internal combustion engine, and gas turbine. For low temperature applications, the transcritical CO2 cycles can compete with other existing technologies, while supercritical CO2 cycles are more attractive for medium- and high temperature sources to replace steam Rankine cycles. Moreover, simple and regenerative configurations are more suitable for transcritical cycles, whereas various complex configurations have advantages for medium- and high temperature heat sources to form cogeneration system. Finally, from the viewpoints of in-depth research and engineering applications, several future development directions are put forward. This review hopes to promote the development of s-CO2 cycles for waste heat recovery. -

Thermodynamic Analysis of an Irreversible Maisotsenko Reciprocating Brayton Cycle
entropy Article Thermodynamic Analysis of an Irreversible Maisotsenko Reciprocating Brayton Cycle Fuli Zhu 1,2,3, Lingen Chen 1,2,3,* and Wenhua Wang 1,2,3 1 Institute of Thermal Science and Power Engineering, Naval University of Engineering, Wuhan 430033, China; [email protected] (F.Z.); [email protected] (W.W.) 2 Military Key Laboratory for Naval Ship Power Engineering, Naval University of Engineering, Wuhan 430033, China 3 College of Power Engineering, Naval University of Engineering, Wuhan 430033, China * Correspondence: [email protected] or [email protected]; Tel.: +86-27-8361-5046; Fax: +86-27-8363-8709 Received: 20 January 2018; Accepted: 2 March 2018; Published: 5 March 2018 Abstract: An irreversible Maisotsenko reciprocating Brayton cycle (MRBC) model is established using the finite time thermodynamic (FTT) theory and taking the heat transfer loss (HTL), piston friction loss (PFL), and internal irreversible losses (IILs) into consideration in this paper. A calculation flowchart of the power output (P) and efficiency (η) of the cycle is provided, and the effects of the mass flow rate (MFR) of the injection of water to the cycle and some other design parameters on the performance of cycle are analyzed by detailed numerical examples. Furthermore, the superiority of irreversible MRBC is verified as the cycle and is compared with the traditional irreversible reciprocating Brayton cycle (RBC). The results can provide certain theoretical guiding significance for the optimal design of practical Maisotsenko reciprocating gas turbine plants. Keywords: finite-time thermodynamics; irreversible Maisotsenko reciprocating Brayton cycle; power output; efficiency 1. Introduction The revolutionary Maisotsenko cycle (M-cycle), utilizing the psychrometric renewable energy from the latent heat of water evaporating, was firstly provided by Maisotsenko in 1976. -
Gas Power Cycles
Week 11 Gas Power Cycles ME 300 Thermodynamics II 1 Today’s Outline • Gas turbine engines • Brayton cycle • Analysis • Example ME 300 Thermodynamics II 2 Gas Turbine Engine • Produces shaft power by GE H series power generation gas turbine. This 480-megawatt unit has a rated thermal expanding high enthalpy gas efficiency of 60% in combined cycle through a turbine configurations. • A compressor and a combustor produce the enthalpy increasing pressure and temperature, resp. • The spinning turbine rotates a shaft which drives the compressor • Remaining enthalpy can be used to drive a generator or can be expanded in a nozzle producing kinetic energy e.g. thrust ME 300 Thermodynamics II 3 Enthalpy Generation and Conversion Turbine Fuel converts enthalpy Generator to shaft power for Compressor Combustor electricity increases increases pressure Temperature Air (pv) (u) Nozzle converts enthalpy into kinetic energy ME 300 Thermodynamics II 4 Gas Turbine Engine Components http://www.stanford.edu/group/ctr/ResBriefs/temp05/schluter2.pdf www.aem.umn.edu/research/Images/pw_GasTurbine.gif ME 300 Thermodynamics II 5 Combustor Simulations ME 300 Thermodynamics II 6 Schematic • Fresh air enters compressors ~constant pressure • Air compressed to high pressure in compressor e.g. 23:1 • High pressure air is mixed with injected fuel spray in combustor raising temperatures • High enthalpy product gases expand in turbine producing shaft work to run compressor or Open cycle generator ME 300 Thermodynamics II 7 Air Standard Brayton Cycle • Model as closed cycle -

Mathematical Analysis of Pulse Tube Cryocoolers Technology
Global Journal of researches in engineering Electrical and electronics engineering Volume 12 Issue 6 Version 1.0 May 2012 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Inc. (USA) Online ISSN: 2249-4596 & Print ISSN: 0975-5861 Mathematical Analysis of Pulse Tube Cryocoolers Technology By Shashank Kumar Kushwaha , Amit medhavi & Ravi Prakash Vishvakarma K.N.I.T Sultanpur Abstract - The cryocoolers are being developed for use in space and in terrestrial applications where combinations of long lifetime, high efficiency, compactness, low mass, low vibration, flexible interfacing, load variability, and reliability are essential. Pulse tube cryocoolers are now being used or considered for use in cooling infrared detectors for many space applications. In the development of these systems, as presented in this paper, first the system is analyzed theoretically. Based on the conservation of mass, the equation of motion, the conservation of energy, and the equation of state of a real gas a general model of the pulse tube refrigerator is made. The use of the harmonic approximation simplifies the differential equations of the model, as the time dependency can be solved explicitly and separately from the other dependencies. The model applies only to systems in the steady state. Time dependent effects, such as the cool down, are not described. From the relations the system performance is analyzed. And also we are describing pulse tube refrigeration mathematical models. There are three mathematical order models: first is analyzed enthalpy flow model and heat pumping flow model, second is analyzed adiabatic and isothermal model and third is flow chart of the computer program for numerical simulation. -

Lecture Note Thermodynamics Gas Power Cycle
Gas Power Cycles Our study of gas power cycles will involve the study of those heat engines in which the working fluid remains in the gaseous state throughout the cycle. We often study the ideal cycle in which internal irreversibilities and complexities (the actual intake of air and fuel, the actual combustion process, and the exhaust of products of combustion among others) are removed. We will be concerned with how the major parameters of the cycle affect the performance of heat engines. The performance is often measured in terms of the cycle efficiency. Wnet th = Qin Carnot Cycle The Carnot cycle was introduced in Chapter 5 as the most efficient heat engine that can operate between two fixed temperatures TH and TL. The Carnot cycle is described by the following four processes. Carnot Cycle Process Description 1-2 Isothermal heat addition 2-3 Isentropic expansion 3-4 Isothermal heat rejection 4-1 Isentropic compression Note the processes on both the P-v and T-s diagrams. The areas under the process curves on the P-v diagram represent the work done for closed systems. The net cycle work done is the area enclosed by the cycle on the P-v diagram. The areas under the process curves on the T-s diagram represent the heat transfer for the processes. The net heat added to the cycle is the area that is enclosed by the cycle on the T-s diagram. For a cycle we know Wnet = Qnet; therefore, the areas enclosed on the P-v and T-s diagrams are equal. -

Investigation of Various Novel Air-Breathing Propulsion Systems
Investigation of Various Novel Air-Breathing Propulsion Systems A thesis submitted to the Graduate School of the University of Cincinnati in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE in the Department of Aerospace Engineering & Engineering Mechanics of the College of Engineering and Applied Science 2016 by Jarred M. Wilhite B.S. Aerospace Engineering & Engineering Mechanics University of Cincinnati 2016 Committee Chair: Dr. Ephraim Gutmark Committee Members: Dr. Paul Orkwis & Dr. Mark Turner Abstract The current research investigates the operation and performance of various air-breathing propulsion systems, which are capable of utilizing different types of fuel. This study first focuses on a modular RDE configuration, which was mainly studied to determine which conditions yield stable, continuous rotating detonation for an ethylene-air mixture. The performance of this RDE was analyzed by studying various parameters such as mass flow rate, equivalence ratios, wave speed and cell size. For relatively low mass flow rates near stoichiometric conditions, a rotating detonation wave is observed for an ethylene-RDE, but at speeds less than an ideal detonation wave. The current research also involves investigating the newly designed, Twin Oxidizer Injection Capable (TOXIC) RDE. Mixtures of hydrogen and air were utilized for this configuration, resulting in sustained rotating detonation for various mass flow rates and equivalence ratios. A thrust stand was also developed to observe and further measure the performance of the TOXIC RDE. Further analysis was conducted to accurately model and simulate the response of thrust stand during operation of the RDE. Also included in this research are findings and analysis of a propulsion system capable of operating on the Inverse Brayton Cycle. -

4R Supercritical Carbon Dioxide Brayton Cycle
Clean Power Quadrennial Technology Review 2015 Chapter 4: Advancing Clean Electric Power Technologies Technology Assessments Advanced Plant Technologies Biopower Clean Power Carbon Dioxide Capture and Storage Value-Added Options Carbon Dioxide Capture for Natural Gas and Industrial Applications Carbon Dioxide Capture Technologies Carbon Dioxide Storage Technologies Crosscutting Technologies in Carbon Dioxide Capture and Storage Fast-spectrum Reactors Geothermal Power High Temperature Reactors Hybrid Nuclear-Renewable Energy Systems Hydropower Light Water Reactors Marine and Hydrokinetic Power Nuclear Fuel Cycles Solar Power Stationary Fuel Cells U.S. DEPARTMENT OF Supercritical Carbon Dioxide Brayton Cycle ENERGY Wind Power Clean Power Quadrennial Technology Review 2015 Supercritical Carbon Dioxide Brayton Cycle Chapter 4: Technology Assessments Introduction The vast majority of electric power generation for the grid is accomplished by coupling a thermal power cycle to a heat source. The nature and configuration of the thermal power cycle is designed so as to give as efficient power production as is economically attractive. Much of the DOE R&D portfolio is focused on improving the overall efficiency and economics of electric power generation. To that end, there are three primary areas of focus for R&D to improve electric power generation efficiency: (1) increasing the fraction of the energy in the heat source that can be harvested for use in the thermal power cycle; (2) increasing the intrinsic efficiency of the thermal power cycle; and (3) decreasing the parasitic power requirement for the balance of plant (BOP). As will be discussed further below, the first two focus areas cannot be pursued in isolation as they are often antagonistic. -
Modeling and Analysis of a Hybrid Solar-Dish Brayton Engine
Modeling and Analysis of a Hybrid Solar-Dish Brayton Engine Sara Ghaem Sigarchian MasterSara Ghaemof Science Sigarchian Thesis KTH School of Industrial Engineering and Management EnergySemi Technology Final Report EGI - 2012Draft-Fe b Division of HPT SE-100 44 STOCKHOLM Master of Science Thesis EGI 2012:HPT Modeling and Analysis of a Hybrid Solar-Dish Brayton Engine Sara Ghaem Sigarchian Approved Examiner Supervisors Date Prof. Torsten Fransson Anders Malmquist , Torsten Strand Commissioner Contact person ABSTRACT The negative environmental impacts of fossil-fuel electricity production emphasize on using more renewable energy sources in power generation. Electricity production using solar energy is well known as one of the promising solutions for ever-growing problems of global warming and limited supply of fossil fuels. It is well known that dish-engine systems demonstrate the highest solar-to-electric efficiencies, compared to other solar technologies [1, 2]. High efficiency, hybridization potential, modularity and low cost potential make them excellent candidates for small-scale decentralized power generation [1, 2]. A number of units can be grouped together to form a dish-engine farm and produces the desired electrical output [1] In most contemporary dish-engine systems, Stirling engines [3] have been used as the power conversion unit; however, small-scale externally-fired, recuperated gas turbines (EFGT) would appear to have considerable potential to be used in solar-fossil fuel hybrid dish systems. An EFGT integrated with a solar receiver is known as a dish-Brayton. They show a number of advantages when compared with Stirling engine systems, chief amongst them a significant reduction in O&M costs and simplified hybridization schemes. -
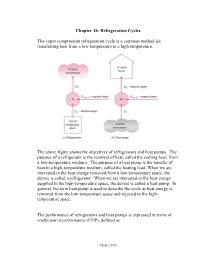
Chapter 10: Refrigeration Cycles
Chapter 10: Refrigeration Cycles The vapor compression refrigeration cycle is a common method for transferring heat from a low temperature to a high temperature. The above figure shows the objectives of refrigerators and heat pumps. The purpose of a refrigerator is the removal of heat, called the cooling load, from a low-temperature medium. The purpose of a heat pump is the transfer of heat to a high-temperature medium, called the heating load. When we are interested in the heat energy removed from a low-temperature space, the device is called a refrigerator. When we are interested in the heat energy supplied to the high-temperature space, the device is called a heat pump. In general, the term heat pump is used to describe the cycle as heat energy is removed from the low-temperature space and rejected to the high- temperature space. The performance of refrigerators and heat pumps is expressed in terms of coefficient of performance (COP), defined as Chapter 10-1 Desired output Cooling effect QL COPR === Required input Work input Wnet, in Desired output Heating effect QH COPHP === Required input Work input Wnet, in Both COPR and COPHP can be larger than 1. Under the same operating conditions, the COPs are related by COPHP=+ COP R 1 Can you show this to be true? Refrigerators, air conditioners, and heat pumps are rated with a SEER number or seasonal adjusted energy efficiency ratio. The SEER is defined as the Btu/hr of heat transferred per watt of work energy input. The Btu is the British thermal unit and is equivalent to 778 ft-lbf of work (1 W = 3.4122 Btu/hr).