Applications of Microfluidic Chips in Optical Manipulation Photoporation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Atmosphere Inside a Bag of Potato Chips.Pdf
THE A T M O S P H E R I C R E S E R V O I R Examining the Atmosphere and Atmospheric Resource Management The Atmosphere Inside a Bag of Potato Chips AIR By Mark D. Schneider Changes in atmospheric pressure occur all around us and in Potato Chips North Dakota our gusty winds are the most obvious example. When we fly in a commercial jet or drive over a mountain Potato Chips pass, our ears tell us about a pressure change by popping. Potato Chips Suppose that you’re a potato chip company wanting to distribute your product to many locations across the country. Some of these locations are at high altitudes which can cause your potato chip bags to expand and possibly burst open due During MAP, nitrogen gas is repeatedly injected and to a change in atmospheric pressure. How do you package removed from food packaging to eliminate oxygen. This and ship your chips without damaging them? Certainly process can reduce the oxygen content to 3% or less. The end climate-controlled trucks or containers are one part of the result is increased shelf-life with a longer expiration date for solution. By keeping your product at a constant temperature, consumers. you’re eliminating a change in pressure due to either heating or cooling. Once a bag of potato chips is opened, the inevitable mixing of outside air begins to oxidize the contents and degrade The initial packaging process before the potato chips are the freshness. The 21 percent oxygen gas now introduced shipped plays the largest role in successful distribution to the bag begins its work breaking down the oils that help though. -

NBC TICKET OPTIONS July 29Th – August 13Th 2016
NBC TICKET OPTIONS July 29th – August 13th 2016 Skybox Value # Allocated Min # Max # Ticket Includes All 16 Days $4,000 25 $1000 Food and Beverage Credit Included Friday-Saturday $750 25 $250 Food and Beverage Credit Included Sunday - Thursday $600 25 $200 Food and Beverage Credit Included Group Field Pass - Friday - Saturday $250 15 30 Adult Beverages and $50 Concession Credit Field Pass - Sunday - Thursday $200 15 30 Adult Beverages and $40 Concession Credit $40 Food and Adult Beverage, $30 Food Only, $20 3-12 years old. All you can Eat! Includes slow-smoked pulled pork, all beef hot dogs, brats, baked beans, kettle chips, popcorn, peanuts, soda, water, beer, and wine. Beer and Wine are limited. Includes a Party Deck (All Inclusive) $20-$40 20-70 20 70 reserved lower seat ticket. The Home Run - Includes all beef hot dogs, baked beans, kettle chips, soda & water. $15/person. Includes reserved lower seat ticket. The Grand Slam - Includes all beef hot dogs, cheeseburgers w/fixins, baked beans, kettle chips, soda & water. $20/person. Includes reserved lower seat ticket. Pre-game Picnic The "BBQ" Slam - Includes slow-smoked pulled pork, all beef hot dogs, baked beans, Hard Ball Café – 200 people Max kettle chips, soda, water, lemonade & tea. $22/person. Includes reserved lower seat Miller Lite Pavilion – 500 People Max $15,20,22 20 500 ticket. Individual Session Tickets—All Day Lower Box Seats (Lower Section) $11 Upper Box Seats & GA Bleachers (Upper Section) $7 Ticket Packages World Series Pass-Lower Box (Lower Section) $140 World Series -

Flavor Enhancement in Chips, Crisps & Savory Applications
Flavor enhancement in Chips, Crisps & Savory Applications Manufacturers of chips, crisps and savory foodstuffs are working hard to replace the old ingredients in their formulations by new and natural ones in order to respond to the consumers’ need for healthy and tasty snacks. Although snacks are inexpensive, tasty and easily available, they are known to have a negative impact on health due to the use of some harmful additives, such as BHA and BHT, or monosodium glutamate, used for flavor enhancement. Since consumers are now more and more health-aware, chips manufacturers must come up with healthier alternatives. Based on this particular need, Galactic has Advantages developed Galacid™ Powder 60, an effective solution that will make chips, ✓ Enhancement of meat salty biscuits, etc. both tasty and safer for flavors consumption. It consists of 60% free L(+) ✓ Enhance cheese and lactic acid and calcium lactate as carrier, herb flavors is highly stable and has a minimal hygroscopic behavior. The general ✓ Low hygroscopicity functionalities of lactic acid powder are pH regulator and flavor enhancer in ✓ various savory products. In snacks applications, Galacid™ Powder 60 enhances flavors such as meat, dairy and herbs. For example, barbecue flavor chips, cheese & onion flavors crisps, barbecue biscuits, etc. The calcium lactate contained in Galacid™ Powder 60 helps increase the crispiness and reduce the fat absorbed by the product if it is fried. RECOMMENDED USE AND FUNCTIONALITIES: Flavor enhancement by lactic acid Dosage range in finished product Functionality Savory (flavoring) by application Declaration Cheese Examples of dosage in Cream Galacid™ crisps flavorings: Pepper 1,0% - 4,0% E 327 (Calcium lactate) Tomato Powder 60 1-3% in cheese & onion E 270 (Lactic acid) Onion 2-4% in salt & vinegar Soy In general, 6% w/w of Chili flavoring Ginger Galactic Our FOOD Development team remains at your disposal for further trials, Innovation Campus information, training etc. -

Appendix A: Non-Executive Directors of Channel 4 1981–92
Appendix A: Non-Executive Directors of Channel 4 1981–92 The Rt. Hon. Edmund Dell (Chairman 1981–87) Sir Richard Attenborough (Deputy Chairman 1981–86) (Director 1987) (Chairman 1988–91) George Russell (Deputy Chairman 1 Jan 1987–88) Sir Brian Bailey (1 July 1985–89) (Deputy Chairman 1990) Sir Michael Bishop CBE (Deputy Chairman 1991) (Chairman 1992–) David Plowright (Deputy Chairman 1992–) Lord Blake (1 Sept 1983–87) William Brown (1981–85) Carmen Callil (1 July 1985–90) Jennifer d’Abo (1 April 1986–87) Richard Dunn (1 Jan 1989–90) Greg Dyke (11 April 1988–90) Paul Fox (1 July 1985–87) James Gatward (1 July 1984–89) John Gau (1 July 1984–88) Roger Graef (1981–85) Bert Hardy (1992–) Dr Glyn Tegai Hughes (1983–86) Eleri Wynne Jones (22 Jan 1987–90) Anne Lapping (1 Jan 1989–) Mary McAleese (1992–) David McCall (1981–85) John McGrath (1990–) The Hon. Mrs Sara Morrison (1983–85) Sir David Nicholas CBE (1992–) Anthony Pragnell (1 July 1983–88) Usha Prashar (1991–) Peter Rogers (1982–91) Michael Scott (1 July 1984–87) Anthony Smith (1981–84) Anne Sofer (1981–84) Brian Tesler (1981–85) Professor David Vines (1 Jan 1987–91) Joy Whitby (1981–84) 435 Appendix B: Channel 4 Major Programme Awards 1983–92 British Academy of Film and Television Arts (BAFTA) 1983: The Snowman – Best Children’s Programme – Drama 1984: Another Audience With Dame Edna – Best Light Entertainment 1987: Channel 4 News – Best News or Outside Broadcast Coverage 1987: The Lowest of the Low – Special Award for Foreign Documentary 1987: Network 7 – Special Award for Originality -
Molecular Cloning: a Laboratory Manual, 4Th Edition
This is a free sample of content from Molecular Cloning: A Laboratory Manual, 4th edition. Click here for more information or to buy the book. VOLUME 1 Molecular Cloning A LABORATORY MANUAL FOURTH EDITION © 2012 by Cold Spring Harbor Laboratory Press This is a free sample of content from Molecular Cloning: A Laboratory Manual, 4th edition. Click here for more information or to buy the book. OTHER TITLES FROM CSHL PRESS LABORATORY MANUALS Antibodies: A Laboratory Manual Imaging: A Laboratory Manual Live Cell Imaging: A Laboratory Manual, 2nd Edition Manipulating the Mouse Embryo: A Laboratory Manual, 3rd Edition RNA: A Laboratory Manual HANDBOOKS Lab Math: A Handbook of Measurements, Calculations, and Other Quantitative Skills for Use at the Bench Lab Ref, Volume 1: A Handbook of Recipes, Reagents, and Other Reference Tools for Use at the Bench Lab Ref, Volume 2: A Handbook of Recipes, Reagents, and Other Reference Tools for Use at the Bench Statistics at the Bench: A Step-by-Step Handbook for Biologists WEBSITES Molecular Cloning, A Laboratory Manual, 4th Edition, www.molecularcloning.org Cold Spring Harbor Protocols, www.cshprotocols.org © 2012 by Cold Spring Harbor Laboratory Press This is a free sample of content from Molecular Cloning: A Laboratory Manual, 4th edition. Click here for more information or to buy the book. VOLUME 1 Molecular Cloning A LABORATORY MANUAL FOURTH EDITION Michael R. Green Howard Hughes Medical Institute Programs in Gene Function and Expression and in Molecular Medicine University of Massachusetts Medical School Joseph Sambrook Peter MacCallum Cancer Centre and the Peter MacCallum Department of Oncology The University of Melbourne, Australia COLD SPRING HARBOR LABORATORY PRESS Cold Spring Harbor, New York † www.cshlpress.org © 2012 by Cold Spring Harbor Laboratory Press This is a free sample of content from Molecular Cloning: A Laboratory Manual, 4th edition. -
R-44 Instruct ID 08-01-04
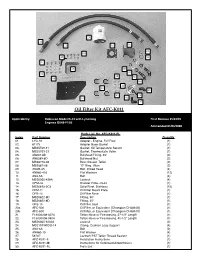
20 22 21 02 01 03 09 10 04 11 15 08 07 12 25 06 14 05 26 24 18 23 19 13 16 17 Oil Filter Kit AFC-K011 Applicability: Robinson Model R-44 with Lycoming First Release 05/24/95 Engines O540-F1B5 Ammended 01/08/2000 Parts List No. AFC-K011-PL Index Part Number Description Quantity 01. LYC-10 Adapter - Engine, Full Flow (1) 02. 61173 Adapter Base Gasket (1) 03. MS35769-11 Gasket, Oil Temperature Sensor (1) 04. MS35769-21 Gasket, Thermostatic Valve (1) 05. AN837-8D Bulkhead Fitting, 45° (2) 06. AN6289-8D Bulkhead Nut (2) 07. MS28773-08 Boss Gasket, Teflon (2) 08. MS9387-08 “O” Ring, Viton (2) 09. AN4H-4A Bolt, Drilled Head (4) 10. AN960-416 Flat Washers (12) 11. AN4-5A Bolt (4) 12. MS20365-428A Locknut (4) 13. OFM-16 Doubler Plate - R-44 (1) 14. MS20613-3C3 Solid Rivet, Stainless (15) 15. OFM-11 Oil FIlter Mount Plate (1) 16. OFB-10 Oil Filter Base (1) 17. MS20822-8D Fitting, 90° (1) 18. MS20823-8D Fitting, 45° (1) 19. OFS-10 Oil Filter Stud (1) 20a. AFC-500 Oil Filter, or Equivalent [Champion CH48108] (1) 20b. AFC-600 Oil Filter, or Equivalent [Champion CH48109] (1) 21. F13000008-0274 Teflon Hose w/ Firesleeving, 27-1/2" Length (1) 22. F13000008-0404 Teflon Hose w/ Firesleeving, 40-1/2" Length (1) 23. MS20365-1032A Locknut (2) 24. MS21919WDG-14 Clamp, Cushion Loop Support (4) 25. AN3-4A Bolt (2) 26. AN960-10 Flat Washer (4) 27. 56707 Loctite® PST Teflon Thread Sealant (1) 28. -

Northern Virginia (VSGA Northern Sections) Interclub "A" Team Matches 2019 Rules Sheet
Northern Virginia (VSGA Northern Sections) Interclub "A" Team Matches 2019 Rules Sheet Teams and Schedule: To be determined shortly after entries close on March 1st, 2019. Schedule will be posted to web site (www.vsgane.com) as well as e-mailed to contact points (A-Team captains and club professionals) at participating clubs. Matches are open to member clubs of the VSGA Northern Virginia Sections (Northeast, Northcentral, Northwest and Fredericksburg Sections). Starting Times: 11:30 a.m. Matches may begin as early as 11:00 a.m. or as late as 12:00 noon, provided that the visiting team is notified at least 72 hours in advance. Team captains are responsible for coordinating starting times for the matches. The captain of the team unable to start at 11:30 a.m. is responsible for contacting the captain of the opposing team. Please coordinate! Rules: Whether play is to be by summer or winter rules is to be determined by the host superintendent. One professional (head or staff) from each club will be eligible to play on the A-Team. Any member of the professional staff may participate and must play in the first group, either home or away. A professional does not have to play, but the opponent may still utilize a professional. The host (non-playing) professional will make any necessary rulings and will have the final word. Team captains are responsible for making their professionals aware of this task. Format: A twelve-member team plays three two-man matches at home and three two- man matches away. Each team competes in a better ball format (four-ball competition) at each club. -

Volkswagen Cabriolets on Television
Volkswagen Cabriolets on Television (Separated by genre. Not in alphabetical order, so use Ctrl+F to find a specific title. Some have embedded links to external videos/photos. Key to star ratings is on last page. Made-for-TV movies are listed in the equivalent film document.) Genre: Documentary/Informational/News Motorweek 20 Cars That Changed The World What Would You Do? 1989 2001; Episode 3 ABC News Special Telemotor Autotest Telemotor Autotest 60 Jahre Volkswagen 1979/1980 ca. 1988 2009 Genre: Mini-series The Man Who Made Husbands Jealous Floodtide Un été de canicule 1997 1987; Episode: 1.03 2003; Episode: 3 Goltuppen Devices & Desires Den Svarta Cirkeln 1991; Episode: 3 1991; Episode: 2 1990; Episode: 1 © 2015 KamzKreationz 1 Cabriolets on TV Genre: Comedy/Sitcom/Dramedy Chuck Chuck Curb Your Enthusiasm 2007; Episode 1.07 2008; Episode 2.04 2004; Episode 4.08 Dharma & Greg Doogie Howser, M.D. 2001; Episode 5.04 1989; Episode 1.01 Grace Under Fire Hannah Montana Hannah Montana 1996; Episode 4.17 2006; Episode 1.02 2006; Episode 1.14 King of Queens King of Queens King of Queens 1998; Episode 1.__ 1999; Episode 2.09 2000; Episode 3.01 1999; Episode 2.22 2000; Episode 3.08 Malcolm In The Middle Malcolm In The Middle My Name Is Earl 2001; Episode 2.09 2001; Episode 2.01 2006; Episode 2.07 © 2015 KamzKreationz 2 Cabriolets on TV Reno 911! Saved By The Bell Seinfeld 2003; Episode 1.05 Seasons 3 & 4 DVD cover 1991; Episode 3.06 Seinfeld Seinfeld Step By Step 1992; Episode 4.22 1993; Episode 5.03 1991; Episode 1.16 That '70s Show The Big Bang -

Data Sheets PIN Diode Chips Supplied on Film Frame
DATA SHEET PIN Diode Chips Supplied on Film Frame Applications Switches Attenuators Features Preferred device for module applications PIN diodes supplied are 100% tested, saw cut, and mounted on film frame Description Low cost The PIN diodes that comprise this family of diodes supplied on film frames are designed for high-volume applications from 10 MHz to over 3 GHz. This family contains three groups of PIN diodes: Skyworks GreenTM products are compliant with 1. Low-capacitance, low-resistance PIN diodes designed primarily all applicable legislation and are halogen-free. for RF switching applications: For additional information, refer to Skyworks SMP1320-099 Definition of GreenTM, document number SMP1321-099 SQ04–0074. SMP1322-099 SMP1340-099 2. PIN diodes with mid-range I-layers and resistance designed for either RF switching or attenuator applications: SMP1302-099 SMP1331-099 SMP1353-099 3. PIN diodes with thick I-layers designed for low-distortion RF variable attenuator applications: SMP1304-099 SMP1307-099 These PIN diodes are provided as 100 percent tested, diced wafers mounted on film frames for optimal compatibility with high-volume pick-and-place assembly techniques. Absolute maximum ratings are provided in Table 1. Electrical specifications are provided in Table 2. Chip dimensions are shown in Table 3. Typical performance characteristics are illustrated in Figures 1 through 5. Figure 6 describes the wafer film frame. Skyworks Solutions, Inc. • Phone [781] 376-3000 • Fax [781] 376-3100 • [email protected] • www.skyworksinc.com 200140M • Skyworks Proprietary Information • Products and Product Information are Subject to Change Without Notice • June 24, 2016 1 DATA SHEET • PIN DIODE CHIPS SUPPLIED ON FILM FRAME Table 1. -

Thin Film Resistor Chips
Thin Film Resistor Chips Resistor Ordering System 4) Is the resistor value total % + tolerance See chart below 5) Is the 2nd resistor value total % ±tolerance (if applicable) Example 1 2 3 4 5 6 7 8 A + 0.5 Ohm F + 1% MTR - 2R2K - SR2 - K - NA - G - 1 - T B + 1.0 Ohm G + 2% C + 2.5 Ohm J + 5% D + .01% K + 10% E + .1% M + 20% 1) Is the three letter device type designation NA Not applicable A) On Dual Value Resistors, (MCR), this is the res. ratio of the 2nd resistor MTR Single Value through Chip Resistor (Resistance top to bottom) (Ratio Res.) To value of the 1st resistor (Prime Res.). B) On Multi Tap Resistors (MMR). This is the tolerance of each of the small value Resistor Taps. The large value Resistor Taps are called out on (4) MIR Single Value Pad to Pad Chip Resistor (Resistance Top pad to Top pad) MCR Dual Value Center Tap Ratio Chip Resistor (Res. #1 = Prime 6) Backing Value / Res. #2 = Ratio Value) G Solderable Gold MMR MultiTap Chip Resistor. GS Gold Silicon eutectic attachment B Bare XXX as needed. 7) The temperature coefficient (TCR) of the resistor, in PPM 2) Is the resistance value in ohms 0 + 150 PPM 1 + 100 PPM 2R2K 2,200 Ohms 2 + 50 PPM 200R 200 Ohms 3 + 10 PPM 20R 20 Ohms 2R2M 2,200,000 Ohms 8) Resistor Material 20R2K 20,200 Ohms 200RK 200,000 Ohms T Tantalum Nitride TaN (Self Passivating) 2R 2.0 Ohms N NiChrome NiCr 3) is the chip substrate material and Example: part no. -
Gene Transfer Methods • the Delivery of DNA Into the Host Is Required for Generation of Genetically Modified Organism
Gene Transfer Methods • The delivery of DNA into the host is required for generation of genetically modified organism. • DNA delivery to host is a 3 stage process, DNA sticking to the host cell, internalization and release into the host cell. • As a result, it depends on 2 parameters- • Surface chemistry of host cell-Host cell surface charges either will attract or repel DNA as a result of opposite or similar charges. Presence of cell wall (in the case of bacteria, fungus and plant) causes additional physical barrier to the uptake and entry of DNA. • Charges on DNA-Negative charge on DNA modulates interaction with the host cell especially cell surface. DNA transfer by natural methods 1. Conjugation 2. Bacterial transformation 3. Retroviral transduction 4. Agrobacterium mediated transfer Conjugation • Requires the presence of a special plasmid called the F plasmid. • Bacteria that have a F plasmid are referred to as as F+ or male. Those that do not have an F plasmid are F- or female. • The F plasmid consists of 25 genes that mostly code for production of sex pilli. • A conjugation event occurs when the male cell extends its sex pilli and one attaches to the female. • This attached pilus is a temporary cytoplasmic bridge through which a replicating F plasmid is transferred from the male to the female. • When transfer is complete, the result is two male cells. • When the F+ plasmid is integrated within the bacterial chromosome, the cell is called an Hfr cell (high frequency of recombination cell). TRANSFORMATION • Transformation is the direct uptake of exogenous DNA from its surroundings and taken up through the cell membrane . -

Software-Aided Automatic Laser Optoporation and Transfection of Cells
www.nature.com/scientificreports OPEN Software-aided automatic laser optoporation and transfection of cells Received: 19 November 2014 1,2 1,2 1 1,2 Accepted: 05 May 2015 Hans Georg Breunig , Aisada Uchugonova , Ana Batista & Karsten König Published: 08 June 2015 Optoporation, the permeabilization of a cell membrane by laser pulses, has emerged as a powerful non-invasive and highly efficient technique to induce transfection of cells. However, the usual tedious manual targeting of individual cells significantly limits the addressable cell number. To overcome this limitation, we present an experimental setup with custom-made software control, for computer-automated cell optoporation. The software evaluates the image contrast of cell contours, automatically designates cell locations for laser illumination, centres those locations in the laser focus, and executes the illumination. By software-controlled meandering of the sample stage, in principle all cells in a typical cell culture dish can be targeted without further user interaction. The automation allows for a significant increase in the number of treatable cells compared to a manual approach. For a laser illumination duration of 100 ms, 7-8 positions on different cells can be targeted every second inside the area of the microscope field of view. The experimental capabilities of the setup are illustrated in experiments with Chinese hamster ovary cells. Furthermore, the influence of laser power is discussed, with mention on post-treatment cell survival and optoporation-efficiency rates. Introducing foreign (genetic) material into targeted cells has become an indispensable technique in bio- medical research1–3. Particular interesting is the possibility to transfect cells, i.e.