Blue Screen Matting
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Alpha and the History of Digital Compositing
Alpha and the History of Digital Compositing Technical Memo 7 Alvy Ray Smith August 15, 1995 Abstract The history of digital image compositing—other than simple digital imple- mentation of known film art—is essentially the history of the alpha channel. Dis- tinctions are drawn between digital printing and digital compositing, between matte creation and matte usage, and between (binary) masking and (subtle) mat- ting. The history of the integral alpha channel and premultiplied alpha ideas are pre- sented and their importance in the development of digital compositing in its cur- rent modern form is made clear. Basic Definitions Digital compositing is often confused with several related technologies. Here we distinguish compositing from printing and matte creation—eg, blue-screen matting. Printing v Compositing Digital film printing is the transfer, under digital computer control, of an im- age stored in digital form to standard chemical, analog movie film. It requires a sophisticated understanding of film characteristics, light source characteristics, precision film movements, film sizes, filter characteristics, precision scanning de- vices, and digital computer control. We had to solve all these for the Lucasfilm laser-based digital film printer—that happened to be a digital film input scanner too. My colleague David DiFrancesco was honored by the Academy of Motion Picture Art and Sciences last year with a technical award for his achievement on the scanning side at Lucasfilm (along with Gary Starkweather). Also honored was Gary Demos for his CRT-based digital film scanner (along with Dan Cam- eron). Digital printing is the generalization of this technology to other media, such as video and paper. -
Richer Worlds for Next Gen Games: Data Amplification Techniques Survey
Richer Worlds for Next Gen Games: Data Amplification Techniques Survey Natalya Tatarchuk 3D Application Research Group ATI Research, Inc. Overview • Defining the problem and motivation • Data Amplification • Procedural data generation • Geometry amplification • Data streaming • Data simplification • Conclusion Overview • Defining the problem and motivation • Data Amplification • Procedural data generation • Geometry amplification • Data streaming • Data simplification • Conclusion Games and Current Hardware • Games currently are CPU-limited – Tuned until they are not GPU-limited – CPU performance increases have slowed down (clock speed hit brick walls) – Multicore is used in limited ways Trends in Games Today • Market demands larger, more complex game worlds – Details, details, details • Existing games already see increase in game data – Data storage progression: Floppies → CDs → DVDs – HALO2.0 - 4.2GB – HD-DVD/Blueray → 20GB [David Blythe, MS Meltdown 2005] Motivation • GPU performance increased tremendously over the years – Parallel architecture allows consumption of ever increasing amounts of data and fast processing – Major architectural changes happen roughly every 2 years – 2x speed increase also every 2 years – Current games tend to be • Arithmetic limited (shader limited) • Memory limited • GPUs can consume ever increasing amounts of data, producing high fidelity images – GPU-based geometry generation is on the horizon – Next gen consoles Why Not Just Author A Ton of Assets? • Rising development cost – Content creation is the bottleneck -
Hereby the Screen Stands in For, and Thereby Occludes, the Deeper Workings of the Computer Itself
John Warnock and an IDI graphical display unit, University of Utah, 1968. Courtesy Salt Lake City Deseret News . 24 doi:10.1162/GREY_a_00233 Downloaded from http://www.mitpressjournals.org/doi/pdf/10.1162/GREY_a_00233 by guest on 27 September 2021 The Random-Access Image: Memory and the History of the Computer Screen JACOB GABOURY A memory is a means for displacing in time various events which depend upon the same information. —J. Presper Eckert Jr. 1 When we speak of graphics, we think of images. Be it the windowed interface of a personal computer, the tactile swipe of icons across a mobile device, or the surreal effects of computer-enhanced film and video games—all are graphics. Understandably, then, computer graphics are most often understood as the images displayed on a computer screen. This pairing of the image and the screen is so natural that we rarely theorize the screen as a medium itself, one with a heterogeneous history that develops in parallel with other visual and computa - tional forms. 2 What then, of the screen? To be sure, the computer screen follows in the tradition of the visual frame that delimits, contains, and produces the image. 3 It is also the skin of the interface that allows us to engage with, augment, and relate to technical things. 4 But the computer screen was also a cathode ray tube (CRT) phosphorescing in response to an electron beam, modified by a grid of randomly accessible memory that stores, maps, and transforms thousands of bits in real time. The screen is not simply an enduring technique or evocative metaphor; it is a hardware object whose transformations have shaped the ma - terial conditions of our visual culture. -
Castle in the Sky: Dynamic Sky Replacement and Harmonization in Videos
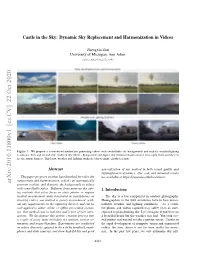
Castle in the Sky: Dynamic Sky Replacement and Harmonization in Videos Zhengxia Zou University of Michigan, Ann Arbor [email protected] Figure 1: We propose a vision-based method for generating videos with controllable sky backgrounds and realistic weather/lighting conditions. First and second row: rendered sky videos - flying castle and Jupiter sky (leftmost shows a frame from input video and the rest are the output frames). Third row: weather and lighting synthesis (day to night, cloudy to rainy). Abstract generalization of our method in both visual quality and lighting/motion dynamics. Our code and animated results This paper proposes a vision-based method for video sky are available at https://jiupinjia.github.io/skyar/. replacement and harmonization, which can automatically arXiv:2010.11800v1 [cs.CV] 22 Oct 2020 generate realistic and dramatic sky backgrounds in videos with controllable styles. Different from previous sky edit- 1. Introduction ing methods that either focus on static photos or require inertial measurement units integrated in smartphones on The sky is a key component in outdoor photography. shooting videos, our method is purely vision-based, with- Photographers in the wild sometimes have to face uncon- out any requirements on the capturing devices, and can be trollable weather and lighting conditions. As a result, well applied to either online or offline processing scenar- the photos and videos captured may suffer from an over- ios. Our method runs in real-time and is free of user inter- exposed or plain-looking sky. Let’s imagine if you were on actions. We decompose this artistic creation process into a beautiful beach but the weather was bad. -

Meiermovies Short Films A-Z
MeierMovies Short Films A-Z Theatrically released motion pictures of 40 minutes or less Before perusing this list, I suggest reading my introduction to short films at the beginning of my By Star Rating list. That introduction will help explain my star choices and criteria. For a guide to colors and symbols, see Key. Movie Stars Location seen (if known) Year Director A A.D. 1363, The End of Chivalry 2 Florida Film Festival 2015 2015 Jake Mahaffy A la Francaise 3 Enzian (Oscar Shorts) 2013 Hazebroucq/Leleu/Boyer/Hsien/Lorton The Aaron Case 3 Enzian (FilmSlam 5/16) 2015 Sarah Peterson Aashpordha (Audacity) FL 2 Enzian (South Asian FF) 2011 Anirban Roy Abandoned Love 2 Enzian (Brouhaha 2014) 2014 Sarah Allsup ABC FL 1 Florida Film Festival 2014 2014 Nanna Huolman Abnie Oberfork: A Tale of Self-Preservation 0 Florida Film Festival 2018 2017 Shannon Fleming Abortion Helpline, This Is Lisa 3 Florida Film Festival 2020 2019 Barbara Attie/Janet Goldwater/Mike Attie Abiogenesis 2 Enzian (Oscar Shorts) 2012 Richard Mans The Absence of Eddy Table 4 Florida Film Festival 2017 2016 Rune Spaans Acabo de Tener un Sueño (I’ve Just Had a Dream) FL 3 Love Your Shorts 2016 2014 Javi Navarro Accidents, Blunders and Calamities 1 Florida Film Festival 2016 2015 James Cunningham Accordion Player Sl 1 1888 Louis Le Prince The Accountant 0 Enzian (FilmSlam 10/15) 2015 Stephen Morgan/Alex Couch Achoo 2 Oscar Shorts 2018 2018 L. Boutrot/E. Carret/M. Creantor Acide FL 2 Orlando International FF 2020 2018 Just Philippot Acoustic Ninja 2 Enzian (Brouhaha 2016) 2016 Robert Bevis Ace in the Hole 0 Orlando Film Festival 2013 2013 Wesley T. -

Introduction to Renderman 1977: Star Wars IV: a New Hope
1 History of RenderMan, I 2 Introduction to RenderMan 1977: Star Wars IV: A New Hope Mike Bailey [email protected] Oregon State University 1979: Ed Catmull, Alvy Ray Smith, and others leave NYIT to form the Computer Division of Lucasfilm This work is licensed under a Creative Image Digital Editing Effects Image/Volume Commons Attribution-NonCommercial- NoDerivatives 4.0 International License Processing and Compositing Rendering Hardware 1984: John Lassiter leaves Disney Animation to join Pixar Oregon State University Oregon State University Computer Graphics Computer Graphics IntroToRenderMan.pptx mjb – December 26, 2016 mjb – December 26, 2016 History of RenderMan, II 3 History of RenderMan, III 4 Pixar Animation Image/Volume Studios Rendering Hardware 1986: Steve Jobs buys Pixar for $10M Pixar Image Rendering Steve Jobs adds another $60M to keep Pixar running Computer Software 1986: Luxo Jr.– Nominated for an Academy Award Star Trek II (1982) Young Sherlock Holmes (1985) 1988: Tin Toy – won Academy Award for Best Animated Short REYES 1993: RenderMan wins a Technical Academy Award 1995: Toy Story RenderMan 1984 (1984) Pixar Animation 1995: Pixar IPO -- Steve Jobs’s stake is now worth $1.2B Studios RIB Shade Trees 2004: Pixar bought by Disney for $7B, making Steve Jobs’s stake now worth $3.5B Steve Jobs is now Disney’s largest shareholder (7%) – Oregon State University Oregon State University Computer Graphics prman Computer Graphicsway ahead of even Roy Disney (1%) mjb – December 26, 2016 mjb – December 26, 2016 5 6 Toy Story 2, -

Alvy Ray Smith Co-Founder of Pixar
Alvy Ray Smith Co-founder of Pixar Dr Alvy Ray Smith is the co-founder of two successful startups: Pixar, an animation studio which was sold to Disney, and Altamira, a software company which was sold to Microsoft. Smith also co-founded the Lucas film Computer Division which developed computer graphics software including early renderer technology. As director of the Computer Graphics Project, he created and directed the "Genesis Demo" in The Wrath of Khan, and conceived and directed the short animated film The Adventures of Andre and Wally B., starring the animator John Lasseter. He proposed and negotiated the Academy-Award winning Disney computer animation production system, CAPS. Smith was an original member of the Computer Graphics Lab of the New York Institute of Technology and was the First Graphics Fellow at Microsoft. While at Xerox PARC, he witnessed the birth of the personal computer and received two technical Academy Awards, for the alpha channel and digital paint systems. He invented the first full-colour paint program, the HSV (or HSB) colour transform, and the alpha channel. Smith was instrumental, as a Regent, in initiating the Visible Human Project of the National Library of Medicine and was a star witness in a trial that successfully invalidated five patents that threatened Adobe Photoshop. He was also active in the development of the HDTV standard. Smith holds a Ph.D. from Stanford University and an honorary doctorate from New Mexico State University. He is a member of the National Academy of Engineering, a Fellow of the American Association for the Advancement of Science, and a Fellow of the American Society of Genealogists. -

How to Innovate Like Walt Disney and the Pixarians Bill Capodagli
Dreams and Dreamers How to Innovate Like Walt Disney and the Pixarians Bill Capodagli www.capojac.com Why Pixar? • 1995 • Corporate Playground • Toy Story, Looking at the World Through the Eyes of a Child Through the Eyes of a Child “As naïve as it may sound, making Toy Story felt like an extension of school, we were just making a film we wanted to make for us and our friends to enjoy.” Pete Docter Goals • Paint a picture of Pixar’s magical playground • Inspire you to create your own playground where collective creativity abounds. • Provide ideas for addressing key issues in your own organizations Key Issues • Teamwork • Turnover/Maintaining Talent • Do More with Less • Speed of Innovation The Dreamers • Walt Disney • Ed Catmull • Alvy Ray Smith • John Lasseter •Dream Like a Child •Believe in Your Playmates •Dare to Jump in the Water and Make Waves •Do Unleash Your Childlike Potential Dream Like a Child Where did the Creativity Go? • First-mover advantage not always the case • 1912 White Castle – 1961 McDonalds • 1871 Woolworth – 1962 Wal-Mart • 1919 Felix the Cat – 1928 Mickey Mouse Short-Term Stupidity • “It is never about cheaper faster. It’s creating for the long-term. People here love the characters and they are aware these films, if done correctly are living things.” Brad Bird Hey Kids, Let’s Put on a Show! • “What makes a movie successful is not only the technology but the story that brings people to see it over and over–it’s got to be heartfelt and warm.” Andrew Slabin, entertainment analyst Hey Kids, Let’s Put on a Show! • Toy Story 2 (1999) “direct to video” • “These were the people that put out Cinderella II. -

Der Computeranimierte Spielfilm
Klaus Kohlmann Der computeranimierte Spielfilm Klaus Kohlmann (Dr. phil.) arbeitet als 3-D-Artist für mehrere Agen- turen sowie als Autor für Fachmagazine. Er ist Universitätslehrbe- auftragter für 3-D-Computergrafik. (www.klauskohlmann.de) Klaus Kohlmann Der computeranimierte Spielfilm. Forschungen zur Inszenierung und Klassifizierung des 3-D-Computer-Trickfilms Das Buch ist eine von der Philosophischen Fakultät der Universität zu Köln angenommene Dissertation zur Erlangung des Doktorgrades Bibliografische Information der Deutschen Bibliothek Die Deutsche Bibliothek verzeichnet diese Publikation in der Deutschen Nationalbibliografie; detaillierte bibliografische Daten sind im Internet über http://dnb.ddb.de abrufbar. © 2007 transcript Verlag, Bielefeld This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 3.0 License. Umschlaggestaltung & Innenlayout: Kordula Röckenhaus, Bielefeld Lektorat & Satz: Klaus Kohlmann Druck: Majuskel Medienproduktion GmbH, Wetzlar ISBN 978-3-89942-635-9 Gedruckt auf alterungsbeständigem Papier mit chlorfrei gebleichtem Zellstoff. Besuchen Sie uns im Internet: http://www.transcript-verlag.de Bitte fordern Sie unser Gesamtverzeichnis und andere Broschüren an unter: [email protected] INHALT Einleitung 13 1. Portrait des konventionellen Trickfilms 21 1.1 Ausprägungen und Gattungen 22 1.2 Anfänge der Animation 25 1.3 Stationen des Zeichentrickfilms 26 1.4 Inszenierungsforschung des konventionellen Trickfilms 29 1.5 Der Puppentrickfilm 33 2. Historie und Disposition der 3-D-computerbasierten Bilderzeugung 37 2.1 Computergrafik 37 2.2 3-D-Computergrafik 38 2.3 3-D-Computeranimation 44 2.4 Entwicklungsgeschichtlicher Zusammenhang von Film und Computer 45 2.5 Der vollständig computergenerierte Trickfilm 52 2.6 Der abendfüllende computergenerierte Spielfilm 55 3. Disposition des Computers in der Trickfilmproduktion 57 3.1 CGI im filmwissenschaftlichen Diskurs 57 3.2 Algorithmisierung 58 3.3 Stationen der CG-Produktionslinie 61 3.4 Exkurs: Die 3-D-Applikation 3ds max 71 4. -

Icon Steve Jobs
iCon Steve Jobs The Greatest Second Act in the History of Business by Jeffrey S. Young and William L. Simon John Wiley & Sons © 2005 368 pages Focus Take-Aways Leadership & Mgt. • Steven Jobs has always had charisma and inspirational talent, but his early career Strategy was marked by manipulative, dishonest, boorish behavior. Sales & Marketing • Ever since he co-founded Apple Computer, Inc., Jobs has had a fl air for attractive, Corporate Finance user-friendly industrial design and excellent user interfaces. Human Resources • Many of Jobs' blunders came from trusting his own instincts above everything else. Technology & Production Small Business • Jobs' ventures after Apple were marked by product failures and enormous losses. Economics & Politics • Jobs' road back to success began when he let go of his obsession with hardware, Industries & Regions and focused instead on software and content. Career Development • As CEO, Jobs stuck with Pixar Animation Studios – pouring in millions of dollars for Personal Finance no return – until he and the studio became major forces in Hollywood. Concepts & Trends • Jobs is the only CEO who mastered – and inspired – Apple's renegade culture. • Combined, the iPod, iTunes and iTunes Music Store transformed the music industry. • Under Jobs, Apple has positioned itself carefully for an assault on Microsoft's dom- inance in computers. • At 50, Jobs has learned from his past, is a better man and is tackling new chal- lenges. Rating (10 is best) Overall Applicability Innovation Style 9 7 8 10 To purchase abstracts, personal subscriptions or corporate solutions, please visit our Web site at www.getAbstract.com or call us at our U.S. -

Digital Paint Systems: an Anecdotal and Historical Overview
Digital Paint Systems: An Anecdotal and Historical Overview Alvy Ray Smith The history of digital paint systems derives from many things— chance meetings, coincidences and boredom, artistic license, brilliant researchers, a wealthy benefactor, and, of course, lawsuits. Alvy Ray Smith tells the fascinating story—facts first, then anecdotes—in his own words. This article is based on a talk presented in tal 2D (two-dimensional) and 3D modeling and January 2000 at an evening hosted by the animation, film recording, video editing, and Computer History Museum on Moffatt Field, audio synthesis. An excellent rendering of my near Palo Alto, California. I shared the floor time with Dick Shoup (sounds like “shout,” not with longtime colleague Richard G. “Dick” like “hoop”) in the early days at Xerox PARC Shoup who figures highly in what follows. It is (Palo Alto Research Center) can be found in the also based on a document I submitted to the recent book Dealers of Lightning: Xerox PARC Academy of Motion Picture Arts and Sciences and the Dawn of the Computer Age.4 For other (AMPAS) in 1997 in answer to a call from them PARC references, see Lavendel,5 Pake,6 Perry,7 for information about early paint programs and and Smith.8 their contribution to the film business.1 The time frame dates from the late 1960s to Definitions the early 1980s, from the beginnings of the A digital paint program and a digital paint technology of digital painting up to the first system are distinguished by their functions. A consumer products that implemented it. -

Theatrical Shorts Home Entertainment Shorts Sparkshorts Toy Story Toons Disney + Cars Toons
Documento número 1 THEATRICAL SHORTS HOME ENTERTAINMENT SHORTS SPARKSHORTS TOY STORY TOONS DISNEY + CARS TOONS 35 Las aventuras de André y Wally B. Luxo Jr. Año 1984 Año 1986 Duración 2 minutos Duración 92 segundos Dirección Alvy Ray Smith Dirección John Lasseter El Sueño de Red Tin Toy Año 1987 Año 1988 Duración 4 minutos Duración 5 minutos Dirección John Lasseter Dirección John Lasseter 36 La Destreza de Knick Geri’s game Año 1989 Año 1997 Duración 4 minutos Duración 5 minutos Dirección John Lasseter Dirección Jan Pinkava Vuelo de Pájaros Boundin’ Año 2000 Año 2003 Duración 3 minutos y 27 Duración 5 minutos segundos Dirección Ralph Eggleston Dirección Bud Luckey 37 El hombre orquesta Lifted Año 2006 Año 2007 Duración 4 minutos y 33 Duración 5 minutos segundos Dirección Andrew Jimenez Dirección Gary Rydstrom Presto Parcialmente nublado Año 2008 Año 2009 Duración 5 minutos y 17 Duración 5 minutos y 45 segundos segundos Dirección Doug Sweetland Dirección Peter Sohn 38 Día & Noche La Luna Año 2010 Año 2012 Duración 5 minutos y 57 Duración 7 minutos segundos Dirección Teddy Newton Dirección Enrico Casarosa Party central Azulado Año 2014 Año 2013 Duración 6 minutos Duración 7 minutos Dirección Kelsey Mann Dirección Saschka Unseld 39 Lava Sanjay’s Super Team Año 2015 Año 2015 Duración 7 minutos Duración 7 minutos Dirección James Ford Murphy Dirección Sanjay Patel Piper: Esperando la Marea Lou Año 2016 Año 2017 Duración 6 minutos Duración 6 minutos Dirección Alan Barillaro Dirección Dave Mullins 40 Bao Mike’s New Car Año 2018 Año 2002 Duración 8 minutos Duración 4 minutos Dirección Domee Shi Dirección Pete Docter Roger L.