XGCC the Gnu C/C++ Language System for Embedded Development Revision: Beta 1, 1/23/2000 Copyright © 1999, 2000 by Embedded Support Tools Corporation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Executable Code Is Not the Proper Subject of Copyright Law a Retrospective Criticism of Technical and Legal Naivete in the Apple V
Executable Code is Not the Proper Subject of Copyright Law A retrospective criticism of technical and legal naivete in the Apple V. Franklin case Matthew M. Swann, Clark S. Turner, Ph.D., Department of Computer Science Cal Poly State University November 18, 2004 Abstract: Copyright was created by government for a purpose. Its purpose was to be an incentive to produce and disseminate new and useful knowledge to society. Source code is written to express its underlying ideas and is clearly included as a copyrightable artifact. However, since Apple v. Franklin, copyright has been extended to protect an opaque software executable that does not express its underlying ideas. Common commercial practice involves keeping the source code secret, hiding any innovative ideas expressed there, while copyrighting the executable, where the underlying ideas are not exposed. By examining copyright’s historical heritage we can determine whether software copyright for an opaque artifact upholds the bargain between authors and society as intended by our Founding Fathers. This paper first describes the origins of copyright, the nature of software, and the unique problems involved. It then determines whether current copyright protection for the opaque executable realizes the economic model underpinning copyright law. Having found the current legal interpretation insufficient to protect software without compromising its principles, we suggest new legislation which would respect the philosophy on which copyright in this nation was founded. Table of Contents INTRODUCTION................................................................................................. 1 THE ORIGIN OF COPYRIGHT ........................................................................... 1 The Idea is Born 1 A New Beginning 2 The Social Bargain 3 Copyright and the Constitution 4 THE BASICS OF SOFTWARE .......................................................................... -
Studying the Real World Today's Topics
Studying the real world Today's topics Free and open source software (FOSS) What is it, who uses it, history Making the most of other people's software Learning from, using, and contributing Learning about your own system Using tools to understand software without source Free and open source software Access to source code Free = freedom to use, modify, copy Some potential benefits Can build for different platforms and needs Development driven by community Different perspectives and ideas More people looking at the code for bugs/security issues Structure Volunteers, sponsored by companies Generally anyone can propose ideas and submit code Different structures in charge of what features/code gets in Free and open source software Tons of FOSS out there Nearly everything on myth Desktop applications (Firefox, Chromium, LibreOffice) Programming tools (compilers, libraries, IDEs) Servers (Apache web server, MySQL) Many companies contribute to FOSS Android core Apple Darwin Microsoft .NET A brief history of FOSS 1960s: Software distributed with hardware Source included, users could fix bugs 1970s: Start of software licensing 1974: Software is copyrightable 1975: First license for UNIX sold 1980s: Popularity of closed-source software Software valued independent of hardware Richard Stallman Started the free software movement (1983) The GNU project GNU = GNU's Not Unix An operating system with unix-like interface GNU General Public License Free software: users have access to source, can modify and redistribute Must share modifications under same -
Chapter 1 Introduction to Computers, Programs, and Java
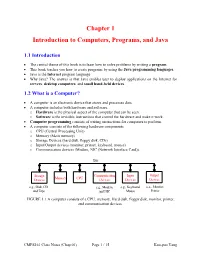
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -
Some Preliminary Implications of WTO Source Code Proposala INTRODUCTION
Some preliminary implications of WTO source code proposala INTRODUCTION ............................................................................................................................................... 1 HOW THIS IS TRIMS+ ....................................................................................................................................... 3 HOW THIS IS TRIPS+ ......................................................................................................................................... 3 WHY GOVERNMENTS MAY REQUIRE TRANSFER OF SOURCE CODE .................................................................. 4 TECHNOLOGY TRANSFER ........................................................................................................................................... 4 AS A REMEDY FOR ANTICOMPETITIVE CONDUCT ............................................................................................................. 4 TAX LAW ............................................................................................................................................................... 5 IN GOVERNMENT PROCUREMENT ................................................................................................................................ 5 WHY GOVERNMENTS MAY REQUIRE ACCESS TO SOURCE CODE ...................................................................... 5 COMPETITION LAW ................................................................................................................................................. -

The Debian GNU/Linux
The Debian GNU/Linux FAQ translator: etony C.F.AN <[email protected]> Debian FAQ Authors version 5.0.1, 17 March 2012 XXX要要要 ,文cãT一些s于 Debian GNU/Linux 的8Á问题. HHHCCC声声声明明明 Copyright © 1996-2003 by Software in the Public Interest (u守v包+,文cHC声明的MÐ下, A¸6\和发布,文c的完t拷贝. (u守上述完t拷贝H,有sHC声明的MÐ下, A¸拷贝和发布ú于,文c完t拷贝的修9H,, v且, 发布@有通Ç修9 ,文c而得0的工\成果, {使(与,文c的¸可声明一致的¸可声明. (u守上述修9H,HC声明的MÐ下, A¸拷贝和发布,文cv它语言的û译H,, 如果,¸可声明有Ïê1o件ú金 会(Free Software Foundation)8Æ的S0化译,, 则uªS0化译,. i Contents 1 定定定II义与与与概概概述述述 1 1.1 什么/ Debian GNU/Linux?...............................................1 1.2 OK, 现(我知SDebian /. Linux/什么?!.......................................1 1.3 什么/ “Hurd”?.......................................................2 1.4 Debian GNU/Linux 与v他 Linux 发LH有什么不同? 为什么要选éDebian GNU/Linux?............2 1.5 Debian ¡划与ê1o件ú金会的GNU¡划 .......................................2 1.6 Debian 的发音Ê+I?...................................................2 2 Debian GNU/Linux 的的的···取取取与与与安安安ÅÅÅ 3 2.1 Debian 的最新H,/?...................................................3 2.2 如U得0 Debian 的安Å盘?................................................3 2.3 如UÎIq安Å Debian?..................................................3 2.4 我有;U:, 可以·取 Debian qÏ吗?..........................................3 2.5 可以o盘安Å吗?.......................................................3 2.6 可以Q络安Å吗?.......................................................4 3 |||¹¹¹'''问问问题题题 5 3.1 可以(什么7的l件û统上ÐL?.............................................5 3.2 与v他的linux发LH|¹L如U?.............................................5 3.3 Debian 源码与v他 -
Beginning Portable Shell Scripting from Novice to Professional
Beginning Portable Shell Scripting From Novice to Professional Peter Seebach 10436fmfinal 1 10/23/08 10:40:24 PM Beginning Portable Shell Scripting: From Novice to Professional Copyright © 2008 by Peter Seebach All rights reserved. No part of this work may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying, recording, or by any information storage or retrieval system, without the prior written permission of the copyright owner and the publisher. ISBN-13 (pbk): 978-1-4302-1043-6 ISBN-10 (pbk): 1-4302-1043-5 ISBN-13 (electronic): 978-1-4302-1044-3 ISBN-10 (electronic): 1-4302-1044-3 Printed and bound in the United States of America 9 8 7 6 5 4 3 2 1 Trademarked names may appear in this book. Rather than use a trademark symbol with every occurrence of a trademarked name, we use the names only in an editorial fashion and to the benefit of the trademark owner, with no intention of infringement of the trademark. Lead Editor: Frank Pohlmann Technical Reviewer: Gary V. Vaughan Editorial Board: Clay Andres, Steve Anglin, Ewan Buckingham, Tony Campbell, Gary Cornell, Jonathan Gennick, Michelle Lowman, Matthew Moodie, Jeffrey Pepper, Frank Pohlmann, Ben Renow-Clarke, Dominic Shakeshaft, Matt Wade, Tom Welsh Project Manager: Richard Dal Porto Copy Editor: Kim Benbow Associate Production Director: Kari Brooks-Copony Production Editor: Katie Stence Compositor: Linda Weidemann, Wolf Creek Press Proofreader: Dan Shaw Indexer: Broccoli Information Management Cover Designer: Kurt Krames Manufacturing Director: Tom Debolski Distributed to the book trade worldwide by Springer-Verlag New York, Inc., 233 Spring Street, 6th Floor, New York, NY 10013. -

Clangjit: Enhancing C++ with Just-In-Time Compilation
ClangJIT: Enhancing C++ with Just-in-Time Compilation Hal Finkel David Poliakoff David F. Richards Lead, Compiler Technology and Lawrence Livermore National Lawrence Livermore National Programming Languages Laboratory Laboratory Leadership Computing Facility Livermore, CA, USA Livermore, CA, USA Argonne National Laboratory [email protected] [email protected] Lemont, IL, USA [email protected] ABSTRACT body of C++ code, but critically, defer the generation and optimiza- The C++ programming language is not only a keystone of the tion of template specializations until runtime using a relatively- high-performance-computing ecosystem but has proven to be a natural extension to the core C++ programming language. successful base for portable parallel-programming frameworks. As A significant design requirement for ClangJIT is that the runtime- is well known, C++ programmers use templates to specialize al- compilation process not explicitly access the file system - only gorithms, thus allowing the compiler to generate highly-efficient loading data from the running binary is permitted - which allows code for specific parameters, data structures, and so on. This capa- for deployment within environments where file-system access is bility has been limited to those specializations that can be identi- either unavailable or prohibitively expensive. In addition, this re- fied when the application is compiled, and in many critical cases, quirement maintains the redistributibility of the binaries using the compiling all potentially-relevant specializations is not practical. JIT-compilation features (i.e., they can run on systems where the ClangJIT provides a well-integrated C++ language extension allow- source code is unavailable). For example, on large HPC deploy- ing template-based specialization to occur during program execu- ments, especially on supercomputers with distributed file systems, tion. -
Computer Architectures
Computer Architectures Motorola 68000, 683xx a ColdFire – CISC CPU Principles Demonstrated Czech Technical University in Prague, Faculty of Electrical Engineering AE0B36APO Computer Architectures Ver.1.10 1 Original Desktop/Workstation 680X0 Feature 68000 'EC000 68010 68020 68030 68040 68060 Data bus 16 8/16 16 8/16/32 8/16/32 32 32 Addr bus 23 23 23 32 32 32 32 Misaligned Addr - - - Yes Yes Yes Yes Virtual memory - - Yes Yes Yes Yes Yes Instruct Cache - - 3 256 256 4096 8192 Data Cache - - - - 256 4096 8192 Memory manager 68451 or 68851 68851 Yes Yes Yes ATC entries - - - - 22 64/64 64/64 FPU interface - - - 68881 or 68882 Internal FPU built-in FPU - - - - - Yes Yes Burst Memory - - - - Yes Yes Yes Bus Cycle type asynchronous both synchronous Data Bus Sizing - - - Yes Yes use 68150 Power (watts) 1.2 0.13-0.26 0.13 1.75 2.6 4-6 3.9-4.9 at frequency of 8.0 8-16 8 16-25 16-50 25-40 50-66 MIPS/kDhryst. 1.2/2.1 2.5/4.3 6.5/11 14/23 35/60 100/300 Transistors 68k 84k 190k 273k 1,170k 2,500k Introduction 1979 1982 1984 1987 1991 1994 AE0B36APO Computer Architectures 2 M68xxx/CPU32/ColdFire – Basic Registers Set 31 16 15 8 7 0 User programming D0 D1 model registers D2 D3 DATA REGISTERS D4 D5 D6 D7 16 15 0 A0 A1 A2 A3 ADDRESS REGISTERS A4 A5 A6 16 15 0 A7 (USP) USER STACK POINTER 0 PC PROGRAM COUNTER 15 8 7 0 0 CCR CONDITION CODE REGISTER 31 16 15 0 A7# (SSP) SUPERVISOR STACK Supervisor/system POINTER 15 8 7 0 programing model (CCR) SR STATUS REGISTER 31 0 basic registers VBR VECTOR BASE REGISTER 31 3 2 0 SFC ALTERNATE FUNCTION DFC CODE REGISTERS AE0B36APO Computer Architectures 3 Status Register – Conditional Code Part USER BYTE SYSTEM BYTE (CONDITION CODE REGISTER) 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 T1 T0 S 0 0 I2 I1 I0 0 0 0 X N Z V C TRACE INTERRUPT EXTEND ENABLE PRIORITY MASK NEGATIVE SUPERVISOR/USER ZERO STATE OVERFLOW CARRY ● N – negative .. -

GNU Guix Cookbook Tutorials and Examples for Using the GNU Guix Functional Package Manager
GNU Guix Cookbook Tutorials and examples for using the GNU Guix Functional Package Manager The GNU Guix Developers Copyright c 2019 Ricardo Wurmus Copyright c 2019 Efraim Flashner Copyright c 2019 Pierre Neidhardt Copyright c 2020 Oleg Pykhalov Copyright c 2020 Matthew Brooks Copyright c 2020 Marcin Karpezo Copyright c 2020 Brice Waegeneire Copyright c 2020 Andr´eBatista Copyright c 2020 Christine Lemmer-Webber Copyright c 2021 Joshua Branson Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.3 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled \GNU Free Documentation License". i Table of Contents GNU Guix Cookbook ::::::::::::::::::::::::::::::: 1 1 Scheme tutorials ::::::::::::::::::::::::::::::::: 2 1.1 A Scheme Crash Course :::::::::::::::::::::::::::::::::::::::: 2 2 Packaging :::::::::::::::::::::::::::::::::::::::: 5 2.1 Packaging Tutorial:::::::::::::::::::::::::::::::::::::::::::::: 5 2.1.1 A \Hello World" package :::::::::::::::::::::::::::::::::: 5 2.1.2 Setup:::::::::::::::::::::::::::::::::::::::::::::::::::::: 8 2.1.2.1 Local file ::::::::::::::::::::::::::::::::::::::::::::: 8 2.1.2.2 `GUIX_PACKAGE_PATH' ::::::::::::::::::::::::::::::::: 9 2.1.2.3 Guix channels ::::::::::::::::::::::::::::::::::::::: 10 2.1.2.4 Direct checkout hacking:::::::::::::::::::::::::::::: 10 2.1.3 Extended example :::::::::::::::::::::::::::::::::::::::: -

Strict Protection for Virtual Function Calls in COTS C++ Binaries
vfGuard: Strict Protection for Virtual Function Calls in COTS C++ Binaries Aravind Prakash Xunchao Hu Heng Yin Department of EECS Department of EECS Department of EECS Syracuse University Syracuse University Syracuse University [email protected] [email protected] [email protected] Abstract—Control-Flow Integrity (CFI) is an important se- these binary-only solutions are unfortunately coarse-grained curity property that needs to be enforced to prevent control- and permissive. flow hijacking attacks. Recent attacks have demonstrated that existing CFI protections for COTS binaries are too permissive, While coarse-grained CFI solutions have significantly re- and vulnerable to sophisticated code reusing attacks. Accounting duced the attack surface, recent efforts by Goktas¸¨ et al. [9] for control flow restrictions imposed at higher levels of semantics and Carlini [10] have demonstrated that coarse-grained CFI is key to increasing CFI precision. In this paper, we aim to provide solutions are too permissive, and can be bypassed by reusing more stringent protection for virtual function calls in COTS large gadgets whose starting addresses are allowed by these C++ binaries by recovering C++ level semantics. To achieve this solutions. The primary reason for such permissiveness is the goal, we recover C++ semantics, including VTables and virtual lack of higher level program semantics that introduce certain callsites. With the extracted C++ semantics, we construct a sound mandates on the control flow. For example, given a class CFI policy and further improve the policy precision by devising two filters, namely “Nested Call Filter” and “Calling Convention inheritance, target of a virtual function dispatch in C++ must Filter”. -

Overview of LLVM Architecture of LLVM
Overview of LLVM Architecture of LLVM Front-end: high-level programming language => LLVM IR Optimizer: optimize/analyze/secure the program in the IR form Back-end: LLVM IR => machine code Optimizer The optimizer’s job: analyze/optimize/secure programs. Optimizations are implemented as passes that traverse some portion of a program to either collect information or transform the program. A pass is an operation on a unit of IR code. Pass is an important concept in LLVM. LLVM IR - A low-level strongly-typed language-independent, SSA-based representation. - Tailored for static analyses and optimization purposes. Part 1 Part 1 has two kinds of passes: - Analysis pass (section 1): only analyze code statically - Transformation pass (section 2 & 3): insert code into the program Analysis pass (Section 1) Void foo (uint32_t int, uint32_t * p) { LLVM IR ... Clang opt } test.c test.bc stderr mypass.so Transformation pass (Section 2 & 3) mypass.so Void foo (uint32_t int, uint32_t * p) { ... LLVM IR opt LLVM IR } test.cpp Int main () { test.bc test-ins.bc ... Clang++ foo () ... LLVM IR } Clang++ main.cpp main.bc LLVM IR lib.cpp Executable lib.bc Section 1 Challenges: - How to traverse instructions in a function http://releases.llvm.org/3.9.1/docs/ProgrammersManual.html#iterating-over-the-instruction-in-a-function - How to print to stderr Section 2 & 3 Challenges: 1. How to traverse basic blocks in a function and instructions in a basic block 2. How to insert function calls to the runtime library a. Add the function signature to the symbol table of the module Section 2 & 3 Challenges: 1. -
Tricore Architecture Manual for a Detailed Discussion of Instruction Set Encoding and Semantics
User’s Manual, v2.3, Feb. 2007 TriCore 32-bit Unified Processor Core Embedded Applications Binary Interface (EABI) Microcontrollers Edition 2007-02 Published by Infineon Technologies AG 81726 München, Germany © Infineon Technologies AG 2007. All Rights Reserved. Legal Disclaimer The information given in this document shall in no event be regarded as a guarantee of conditions or characteristics (“Beschaffenheitsgarantie”). With respect to any examples or hints given herein, any typical values stated herein and/or any information regarding the application of the device, Infineon Technologies hereby disclaims any and all warranties and liabilities of any kind, including without limitation warranties of non- infringement of intellectual property rights of any third party. Information For further information on technology, delivery terms and conditions and prices please contact your nearest Infineon Technologies Office (www.infineon.com). Warnings Due to technical requirements components may contain dangerous substances. For information on the types in question please contact your nearest Infineon Technologies Office. Infineon Technologies Components may only be used in life-support devices or systems with the express written approval of Infineon Technologies, if a failure of such components can reasonably be expected to cause the failure of that life-support device or system, or to affect the safety or effectiveness of that device or system. Life support devices or systems are intended to be implanted in the human body, or to support and/or maintain and sustain and/or protect human life. If they fail, it is reasonable to assume that the health of the user or other persons may be endangered. User’s Manual, v2.3, Feb.