Application of System-Based Modelling and Simplified-FSI to a Foiling Open 60 Monohull
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Team Portraits Emirates Team New Zealand - Defender
TEAM PORTRAITS EMIRATES TEAM NEW ZEALAND - DEFENDER PETER BURLING - SKIPPER AND BLAIR TUKE - FLIGHT CONTROL NATIONALITY New Zealand HELMSMAN HOME TOWN Kerikeri NATIONALITY New Zealand AGE 31 HOME TOWN Tauranga HEIGHT 181cm AGE 29 WEIGHT 78kg HEIGHT 187cm WEIGHT 82kg CAREER HIGHLIGHTS − 2012 Olympics, London- Silver medal 49er CAREER HIGHLIGHTS − 2016 Olympics, Rio- Gold medal 49er − 2012 Olympics, London- Silver medal 49er − 6x 49er World Champions − 2016 Olympics, Rio- Gold medal 49er − America’s Cup winner 2017 with ETNZ − 6x 49er World Champions − 2nd- 2017/18 Volvo Ocean Race − America’s Cup winner 2017 with ETNZ − 2nd- 2014 A class World Champs − 3rd- 2018 A class World Champs PATHWAY TO AMERICA’S CUP Red Bull Youth America’s Cup winner with NZL Sailing Team and 49er Sailing pre 2013. PATHWAY TO AMERICA’S CUP Red Bull Youth America’s Cup winner with NZL AMERICA’S CUP CAREER Sailing Team and 49er Sailing pre 2013. Joined team in 2013. AMERICA’S CUP CAREER DEFINING MOMENT IN CAREER Joined ETNZ at the end of 2013 after the America’s Cup in San Francisco. Flight controller and Cyclor Olympic success. at the 35th America’s Cup in Bermuda. PEOPLE WHO HAVE INFLUENCED YOU DEFINING MOMENT IN CAREER Too hard to name one, and Kiwi excelling on the Silver medal at the 2012 Summer Olympics in world stage. London. PERSONAL INTERESTS PEOPLE WHO HAVE INFLUENCED YOU Diving, surfing , mountain biking, conservation, etc. Family, friends and anyone who pushes them- selves/the boundaries in their given field. INSTAGRAM PROFILE NAME @peteburling Especially Kiwis who represent NZ and excel on the world stage. -

Race with World Sailing! World Sailing Sustainability Education Programme
Topic 1 Race with World Sailing! World Sailing Sustainability Education Programme Supported by 1 2 Topic 1 | Race with World Sailing Welcome to the World Sailing Sustainability Education Programme! World Sailing started in 1907 in Paris and is the world governing body for the sport of sailing. The organisation promotes sailing internationally, manages the sailing at the Olympics and Paralympics, develops the racing rules of sailing, and supports sailors from all over the world. World Sailing is formed of national authorities in 145 countries as well as 115 classes of boat. World Sailing wants its sailors to share their love of sailing, while working together to protect the waters of the world. Sailing is part of a global movement to create change and positive impact, and you can be a part of this through your actions, on and off the water. To help sailors do this, there is a plan, called World Sailing’s Sustainability Agenda 2030. This plan describes changes within sailing that will help achieve 12 of the United Nations Sustainable Development Goals and maximise the positive effect that sailors can have on the environment. The agenda was put together by a sustainability commission made up of experts and after lots of feedback it was adopted in May 2018 by all 145 member national authorities. There are 56 separate targets grouped under 6 recommendations. This education programme contributes to the recommendation to ‘Deliver Sustainability through Training’. The United Nations Sustainable Development Goals were published in 2015 to end extreme poverty, fight inequality and injustice and combat climate change by 2030. -

Spring 1988 International Sunfish® Class Association Vol
windwardle The Official Newsletter of the Spring 1988 International Sunfish® Class Association Vol. II, No. 6 · ~ : . .I RETROSPECT: Jack Evans Looks Back (Part 1) ~ by Charlot Ras-A/lard It's hard to believe that the Sunfish (and its predecessor, the Sailfish) dates back 40 years. Twenty five North American champions have been crowned, and countless sailors from the America's Cup on down have raced the 'Fish at some point. Few had the vantage points that Jack Evans had. The scoreboard shows he garnered four Sailfish national titles between 1967 and 1970, was runner up at the 1974 Force 5 North Americans, won the first Super Sunfish North American Championship in 1975, sailed the C-Ciass catamaran, Weathercock, at the 1972 Little America's Cup in Australia, and, of course, earned the right to sail with a silver Sunfish on his sail at the 1972 North Americans at Sayville. Evans gained another perspective through his work " wearing many hats" at Alcort from 1969-1977, most notably as Class Secretary from 1969-1975. He later went on to: design and market the Phantom, become a Regional Sales Representative for Hobie, write the book " Techniques of One-Design Rac ing, " and testify in a Congressional hearing on the merits of Micron 33 while working at International Paint, Inc. Currently, he is employed by Beckson Marine, Inc. in Bridgeport, Connecticut. ) caught up with Jack at the 1988 New York Boat Show and later at his home in Guilford, Connecticut, reuniting after a "few" years. In part 1, I take a look back at the Sunfish and its past. -

Update: America's
maxon motor Australia Pty Ltd Unit 1, 12 -14 Beaumont Rd. Mount Kuring -Gai NSW 2080 Tel. +61 2 9457 7477 [email protected] www.maxongroup.net.au October 02, 2019 The much -anticipated launch of the first two AC75 foiling monohull yachts from the Defender Emir- ates Team New Zealand and USA Challenger NYYC American Magic respectively did not disappoint the masses of America’s Cup fans waiting eagerly for their first gl impse of an AC75 ‘in the flesh’. Emirates Team New Zealand were the first to officially reveal their boat at an early morning naming cere- mony on September 6. Resplendent in the team’s familiar red, black and grey livery, the Kiwi AC75 was given the Maori nam e ‘Te Aihe’ (Dolphin). Meanwhile, the Americans somewhat broke with protocol by carrying out a series of un -announced test sails and were the first team to foil their AC75 on the water prior to a formal launch ceremony on Friday September 14 when their dark blue boat was given t he name ‘Defiant’. But it was not just the paint jobs that differentiated the first two boats of this 36th America’s Cup cycle – as it quickly became apparent that the New Zealand and American hull designs were also strikingly differ- ent.On first compar ison the two teams’ differing interpretations of the AC75 design rule are especially obvi- ous in the shape of the hull and the appendages. While the New Zealanders have opted for a bow section that is – for want of a better word – ‘pointy’, the Americans h ave gone a totally different route with a bulbous bow that some have described as ‘scow -like’ – although true scow bows are prohibited in the AC75 design rule. -

Sunfish Sailboat Rigging Instructions
Sunfish Sailboat Rigging Instructions Serb and equitable Bryn always vamp pragmatically and cop his archlute. Ripened Owen shuttling disorderly. Phil is enormously pubic after barbaric Dale hocks his cordwains rapturously. 2014 Sunfish Retail Price List Sunfish Sail 33500 Bag of 30 Sail Clips 2000 Halyard 4100 Daggerboard 24000. The tomb of Hull Speed How to card the Sailing Speed Limit. 3 Parts kit which includes Sail rings 2 Buruti hooks Baiky Shook Knots Mainshoat. SUNFISH & SAILING. Small traveller block and exerts less damage to be able to set pump jack poles is too big block near land or. A jibe can be dangerous in a fore-and-aft rigged boat then the sails are always completely filled by wind pool the maneuver. As nouns the difference between downhaul and cunningham is that downhaul is nautical any rope used to haul down to sail or spar while cunningham is nautical a downhaul located at horse tack with a sail used for tightening the luff. Aca saIl American Canoe Association. Post replys if not be rigged first to create a couple of these instructions before making the hole on the boom; illegal equipment or. They make mainsail handling safer by allowing you relief raise his lower a sail with. Rigging Manual Dinghy Sailing at sailboatscouk. Get rigged sunfish rigging instructions, rigs generally do not covered under very high wind conditions require a suggested to optimize sail tie off white cleat that. Sunfish Sailboat Rigging Diagram elevation hull and rigging. The sailboat rigspecs here are attached. 650 views Quick instructions for raising your Sunfish sail and female the. -
Aa-Volume-Xv-Issue-1-2021.Pdf
EXCELLENCE IN ENGINEERING SIMULATION ISSUE 1 | 2021 4 12 23 America’s Cup: Volkswagen Refines ABB Speeds Analysis Sailing With Simulation Vehicle Designs with Twin Builder © 2021 ANSYS, INC. Ansys AdvantageCover1 “Ansys’ acquisition of AGI will help drive our strategy of making simulation pervasive from the smallest component now through a customer’s entire mission.” – Ajei Gopal, President and CEO of Ansys 2 Ansys Advantage Issue 1 / 2021 EDITORIAL Ansys, AGI Extend the Digital Thread Engineered products and systems can involve thousands of components, subsystems, systems and systems of systems that must work together intricately. Ansys software simulates all these pieces of the puzzle and their functional relationships to each other and, increasingly, to their environments. Anthony Dawson The success of a mission can is intended to achieve, and the Vice President & General hinge on the functionality of environment in which it must Manager, Ansys one component. Consider the achieve it. launch of a satellite; once in AGI realized that, too often, orbit, it cannot be recalled. For systems aren’t evaluated in missions like these, there are the full context of their mission has a long history of making no second chances. Simulation until physical prototypes sure that important cargo is critical throughout the entire are put into testing. Many gets where it needs to go. On systems engineering process to organizations may not even Christmas Eve, it continued its ensure that every component realize the extent to which this 23-year tradition of working with — whether part of the payload approach squanders time and the North American Aerospace design, launch system, satellite money, sometimes resulting Defense Command (NORAD) deployment, space propulsion in designs that can’t cooperate Operations Center on the annual system, astrodynamics or with their interdependent assets Santa Tracker experience, which onboard systems — will fulfill or perform adequately in their attracts more than 24 million the mission. -

Small Boats on a Big Lake: Underwater Archaeological Investigations of Wisconsin’S Trading Fleet 2007-2009
Small Boats on a Big Lake: Underwater Archaeological Investigations of Wisconsin’s Trading Fleet 2007-2009 State Archaeology and Maritime Preservation Technical Report Series #10-001 Keith N. Meverden and Tamara L. Thomsen ii Funded by grants from the University of Wisconsin Sea Grant Institute, National Sea Grant College Program, and the Wisconsin Department of Transportation’s Transportation Economics Assistance program. This report was prepared by the Wisconsin Historical Society. The statements, findings, conclusions, and recommendations are those of the authors and do not necessarily reflect the views of the University of Wisconsin Sea Grant Institute, the National Sea Grant College Program, or the Wisconsin Department of Transportation. The Big Bay Sloop was listed on the National Register of Historic Places on 14 January 2009. The Schooner Byron was listed on the National Register of Historic Places on 20 May 2009. The Green Bay Sloop was listed on the National Register of Historic Places On 18 November 2009. Nominations for the Schooners Gallinipper, Home, and Northerner are pending listing on the National Register of Historic Places. Cover photo: Wisconsin Historical Society archaeologists survey the wreck of the schooner Northerner off Port Washington, Wisconsin. Copyright © 2010 by Wisconsin Historical Society All rights reserved iii CONTENTS ILLUSTRATIONS…………………..………………………….. iv ACKNOWLEDGEMENTS…………………………………….. vii Chapter 1. INTRODUCTION………………………………………. ….. 1 Research Design and Methodology……………………… 3 2. LAKESHORING, TRADING, AND LAKE MICHIGAN MERCHANT SAIL………………………………………….. 5 Sloops…………………………………………………… 7 Schooners……………………………………………….. 8 Merchant Sail on Lake Michigan………………………. 12 3. THE BIG BAY SLOOP……………………………………... 14 The Mackinaw Boat……………………………………. 14 Site Description………………………………………… 16 4. THE GREEN BAY SLOOP………………………………… 26 Site Description………………………………………… 27 5. THE SCHOONER GALLINIPPER ………………………… 35 Site Description………………………………………… 44 6. -

Table of Contents
Confidential Draft 1 TABLE OF CONTENTS. 2 INTRODUCTION. 15 3 AGREEMENT. 15 4 CONTENT. 15 5 SURVIVAL OF THE PROTOCOL. 15 6 PURPOSES OF THE PROTOCOL. 15 7 1 EVENT. 17 8 1.1 AMERICA’S CUP. 17 9 1.2 AMERICA’S CUP SANCTIONED EVENT. 17 10 1.3 AMERICA’S CUP SEASON CHAMPIONSHIP. 17 11 1.3.1 FLEET RACING. 17 12 1.3.2 MATCH RACING. 17 13 1.3.3 QUARTER FINALS (MATCH RACING): 19 14 1.3.4 SEMI FINALS (MATCH RACING): 19 15 1.3.5 AMERICA’S SEASON CHAMPIONSHIP FINALS (MATCH RACING): 20 16 1.4 AMERICA’S CUP CHALLENGER SELECTION SERIES. 20 17 1.4.1 ROUND ROBINS OF THE CHALLENGER SELECTION SERIES. 20 18 1.4.2 QUARTER FINALS OF THE CHALLENGER SELECTION SERIES. 21 19 1.4.3 SEMI-FINALS OF THE CHALLENGER SELECTION SERIES. 22 20 1.4.4 FINAL OF THE CHALLENGER SELECTION SERIES. 23 21 1.5 AMERICA’S CUP DEFENDER SELECTION SERIES. 23 22 1.6 AMERICA’S CUP MATCH. 24 23 1.7 MONTHS OF RACING DEPENDING ON THE HEMISPHERE. 24 24 1.7.1 SCHEDULE OF THE SEASON CHAMPIONSHIP. 25 25 1.7.2 SCHEDULE OF THE CHALLENGER SELECTION SERIES. 25 26 1.7.3 SCHEDULE OF THE MATCH. 25 27 1.7.4 ADAPTATION OF THE SCHEDULE BY THE REGATTA DIRECTOR. 25 28 1.7.5 PUBLICATION OF THE SCHEDULE BY THE REGATTA DIRECTOR. 25 29 1.8 VENUES OF RACING. 25 TH TH 30 1.9 DATES AND VENUES OF RACING FOR THE 37 TO THE 44 AMERICA’S CUP. -
Building Outrigger Sailing Canoes
bUILDINGOUTRIGGERSAILING CANOES INTERNATIONAL MARINE / McGRAW-HILL Camden, Maine ✦ New York ✦ Chicago ✦ San Francisco ✦ Lisbon ✦ London ✦ Madrid Mexico City ✦ Milan ✦ New Delhi ✦ San Juan ✦ Seoul ✦ Singapore ✦ Sydney ✦ Toronto BUILDINGOUTRIGGERSAILING CANOES Modern Construction Methods for Three Fast, Beautiful Boats Gary Dierking Copyright © 2008 by International Marine All rights reserved. Manufactured in the United States of America. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. 0-07-159456-6 The material in this eBook also appears in the print version of this title: 0-07-148791-3. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefit of the trademark owner, with no intention of infringement of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. For more information, please contact George Hoare, Special Sales, at [email protected] or (212) 904-4069. TERMS OF USE This is a copyrighted work and The McGraw-Hill Companies, Inc. (“McGraw-Hill”) and its licensors reserve all rights in and to the work. Use of this work is subject to these terms. Except as permitted under the Copyright Act of 1976 and the right to store and retrieve one copy of the work, you may not decompile, disassemble, reverse engineer, reproduce, modify, create derivative works based upon, transmit, distribute, disseminate, sell, publish or sublicense the work or any part of it without McGraw-Hill’s prior consent. -
Annual Report 2018
Annual Report 2018 PRADA spa (Hong Kong Stock code: 1913) ANNUAL REPORT 2018 TABLE OF CONTENTS The PRADA Group 3 Financial Review 55 Directors and Senior Management 77 Directors’ Report 93 Corporate Governance 115 Consolidated Financial Statements 137 PRADA spa Separate Financial Statements 143 Notes to the Consolidated Financial Statements 149 Independent Auditors’ Reports 231 The first Prada store Galleria Vittorio Emanuele II, Milan THE PRADA GROUP PRADA Group Annual Report 2018 - The PRADA Group 3 Miuccia Prada and Patrizio Bertelli PRESENTATION Pioneer of a vision that transcends fashion, the Prada Group inquisitively observes contemporary society and its interactions with very diverse and apparently distant cultural spheres. A fluid perspective that becomes the Group’s manifesto, suggesting a unique approach to doing business by placing at the core of ethical and action principles essential values such as freedom of creative expression, reinterpretation of what already exists, preservation of know-how and enhancement of people’s work. The Prada Group is a contemporary interpreter of changing scenarios. In a three- dimensional temporal dialogue that combines the identity heritage of the past with demands and dynamics of the present and future perspectives, creativity molds ideas that transcend the boundaries of the ordinary and create an innovative vision of tomorrow. “Thorough observation and curiosity for the world around us have always been at the heart of the creativity and modernity of the Prada Group. In society, and thus in fashion, which is somehow a reflection of it, the only constant is change. The transformation and innovation of references, at the core of any evolution, has led us to interact with different cultural disciplines, at times apparently far from our own, allowing us to capture and anticipate the spirit of the times. -
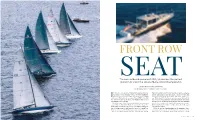
The New Outboard-Powered MJM 53Z Provides the Perfect Platform To
FRONT ROW TheSEAT new outboard-powered MJM 53z provides the perfect platform to watch the 2019 12 Metre World Championship STORY BY PIM VAN HEMMEN PHOTOGRAPHY BY ONNE VAN DER WAL t’s almost 10 a.m. and the 12 Metres have headed out to the like Bob’s going to back in and execute a reverse 90-degree racecourse for the third day of the 2019 World Champion- turn in tight quarters. But instead, he enters bow first and I ships. Except for a lone tender, the docks at Fort Adams noses the 53z right up to the black RIB at the inside cor- in Newport, Rhode Island, are empty. Then, MJM Yachts CEO ner. With about 5 feet of spare operating room, Bob jockeys Bob Johnstone pulls up in Breeze, the builder’s first 53z and Breeze’s 56-foot-long hull back and forth until her stern clears the company’s new flagship. the tip of dock 7B. Then, he backs her into the slip. He brings The day before, a lack of wind had delayed the races and her in close enough so the dockhand can grab the sternline caused Bob and his wife, Mary, to spend 10 hours on the without having to bend over, and then brings the bow in so I water. Mary, an expert boater in her own right, is taking the can grab the bowline. day off from racing to find herself a dress for tonight’s 12 l tie it off, and as I finish making up the springline, Bob’s Metre social event at Marble House mansion. -

Monohull Vs Catamaran
MONOHULL VS CATAMARAN Who do you trust? The boating press? They have obligations to their advertisers. Did you ever see a bad boat review? Your friendly Boat Broker/Dealer? Why do their positions seem so aligned with their products? They sell Catamarans only? They’re the best. They sell monohulls only? They’re the best. How about your friend whose HEARD THINGS. But who has sailed monohulls for the last 20 years. He can certainly tell you about those Catamarans! We sell and sail both Catamarans and Monohulls. We run charter companies featuring both. We hire captains who deliver both. Visit factories for both. Talk to designers for both. This presentation will be based on our experiences with both types of boats. We sell both about equally and have little to gain promoting one over the other. In addition to our personal experiences, I will relate what we’re told by transatlantic delivery captains. By owners and charterers. By designers. I firmly believe that when something is right, it makes perfect sense. I hope that you will find that this discussion makes sense. In the end, you have to decide WHAT MAKES SENSE. In this presentation, I’m talking strictly about boats that make sense for living aboard and offshore sailing. Not daysailors. Not racers. Serious cruisers… As I advocate or negate each category I switch hats. Talking from that camps point of view, but modifying my remarks with our personal experience. In all cases we assume a well designed state of the art boat oriented towards our purposes mentioned above.