Real-Time Operating Systems: Problems and Novel Solutions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Also Includes Slides and Contents From
The Compilation Toolchain Cross-Compilation for Embedded Systems Prof. Andrea Marongiu ([email protected]) Toolchain The toolchain is a set of development tools used in association with source code or binaries generated from the source code • Enables development in a programming language (e.g., C/C++) • It is used for a lot of operations such as a) Compilation b) Preparing Libraries Most common toolchain is the c) Reading a binary file (or part of it) GNU toolchain which is part of d) Debugging the GNU project • Normally it contains a) Compiler : Generate object files from source code files b) Linker: Link object files together to build a binary file c) Library Archiver: To group a set of object files into a library file d) Debugger: To debug the binary file while running e) And other tools The GNU Toolchain GNU (GNU’s Not Unix) The GNU toolchain has played a vital role in the development of the Linux kernel, BSD, and software for embedded systems. The GNU project produced a set of programming tools. Parts of the toolchain we will use are: -gcc: (GNU Compiler Collection): suite of compilers for many programming languages -binutils: Suite of tools including linker (ld), assembler (gas) -gdb: Code debugging tool -libc: Subset of standard C library (assuming a C compiler). -bash: free Unix shell (Bourne-again shell). Default shell on GNU/Linux systems and Mac OSX. Also ported to Microsoft Windows. -make: automation tool for compilation and build Program development tools The process of converting source code to an executable binary image requires several steps, each with its own tool. -

Computer Architecture and Assembly Language
Computer Architecture and Assembly Language Gabriel Laskar EPITA 2015 License I Copyright c 2004-2005, ACU, Benoit Perrot I Copyright c 2004-2008, Alexandre Becoulet I Copyright c 2009-2013, Nicolas Pouillon I Copyright c 2014, Joël Porquet I Copyright c 2015, Gabriel Laskar Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation; with the Invariant Sections being just ‘‘Copying this document’’, no Front-Cover Texts, and no Back-Cover Texts. Introduction Part I Introduction Gabriel Laskar (EPITA) CAAL 2015 3 / 378 Introduction Problem definition 1: Introduction Problem definition Outline Gabriel Laskar (EPITA) CAAL 2015 4 / 378 Introduction Problem definition What are we trying to learn? Computer Architecture What is in the hardware? I A bit of history of computers, current machines I Concepts and conventions: processing, memory, communication, optimization How does a machine run code? I Program execution model I Memory mapping, OS support Gabriel Laskar (EPITA) CAAL 2015 5 / 378 Introduction Problem definition What are we trying to learn? Assembly Language How to “talk” with the machine directly? I Mechanisms involved I Assembly language structure and usage I Low-level assembly language features I C inline assembly Gabriel Laskar (EPITA) CAAL 2015 6 / 378 I Programmers I Wise managers Introduction Problem definition Who do I talk to? I System gurus I Low-level enthusiasts Gabriel Laskar (EPITA) CAAL -

Compiler Construction
Compiler Construction Chapter 11 Compiler Construction Compiler Construction 1 A New Compiler • Perhaps a new source language • Perhaps a new target for an existing compiler • Perhaps both Compiler Construction Compiler Construction 2 Source Language • Larger, more complex languages generally require larger, more complex compilers • Is the source language expected to evolve? – E.g., Java 1.0 ! Java 1.1 ! . – A brand new language may undergo considerable change early on – A small working prototype may be in order – Compiler writers must anticipate some amount of change and their design must therefore be flexible – Lexer and parser generators (like Lex and Yacc) are therefore better than hand- coding the lexer and parser when change is inevitable Compiler Construction Compiler Construction 3 Target Language • The nature of the target language and run-time environment influence compiler construction considerably • A new processor and/or its assembler may be buggy Buggy targets make it difficult to debug compilers for that target! • A successful source language will persist over several target generations – E.g., 386 ! 486 ! Pentium ! . – Thus the design of the IR is important – Modularization of machine-specific details is also important Compiler Construction Compiler Construction 4 Compiler Performance Issues • Compiler speed • Generated code quality • Error diagnostics • Portability • Maintainability Compiler Construction Compiler Construction 5 Compiler Speed • Reduce the number of modules • Reduce the number of passes Perhaps generate machine -

Concurrent Objects and Linearizability Concurrent Computaton
Concurrent Objects and Concurrent Computaton Linearizability memory Nir Shavit Subing for N. Lynch object Fall 2003 object © 2003 Herlihy and Shavit 2 Objectivism FIFO Queue: Enqueue Method • What is a concurrent object? q.enq( ) – How do we describe one? – How do we implement one? – How do we tell if we’re right? © 2003 Herlihy and Shavit 3 © 2003 Herlihy and Shavit 4 FIFO Queue: Dequeue Method Sequential Objects q.deq()/ • Each object has a state – Usually given by a set of fields – Queue example: sequence of items • Each object has a set of methods – Only way to manipulate state – Queue example: enq and deq methods © 2003 Herlihy and Shavit 5 © 2003 Herlihy and Shavit 6 1 Pre and PostConditions for Sequential Specifications Dequeue • If (precondition) – the object is in such-and-such a state • Precondition: – before you call the method, – Queue is non-empty • Then (postcondition) • Postcondition: – the method will return a particular value – Returns first item in queue – or throw a particular exception. • Postcondition: • and (postcondition, con’t) – Removes first item in queue – the object will be in some other state • You got a problem with that? – when the method returns, © 2003 Herlihy and Shavit 7 © 2003 Herlihy and Shavit 8 Pre and PostConditions for Why Sequential Specifications Dequeue Totally Rock • Precondition: • Documentation size linear in number –Queue is empty of methods • Postcondition: – Each method described in isolation – Throws Empty exception • Interactions among methods captured • Postcondition: by side-effects -
Computer Science 322 Operating Systems Topic Notes: Process
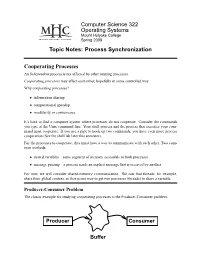
Computer Science 322 Operating Systems Mount Holyoke College Spring 2008 Topic Notes: Process Synchronization Cooperating Processes An Independent process is not affected by other running processes. Cooperating processes may affect each other, hopefully in some controlled way. Why cooperating processes? • information sharing • computational speedup • modularity or convenience It’s hard to find a computer system where processes do not cooperate. Consider the commands you type at the Unix command line. Your shell process and the process that executes your com- mand must cooperate. If you use a pipe to hook up two commands, you have even more process cooperation (See the shell lab later this semester). For the processes to cooperate, they must have a way to communicate with each other. Two com- mon methods: • shared variables – some segment of memory accessible to both processes • message passing – a process sends an explicit message that is received by another For now, we will consider shared-memory communication. We saw that threads, for example, share their global context, so that is one way to get two processes (threads) to share a variable. Producer-Consumer Problem The classic example for studying cooperating processes is the Producer-Consumer problem. Producer Consumer Buffer CS322 OperatingSystems Spring2008 One or more produces processes is “producing” data. This data is stored in a buffer to be “con- sumed” by one or more consumer processes. The buffer may be: • unbounded – We assume that the producer can continue producing items and storing them in the buffer at all times. However, the consumer must wait for an item to be inserted into the buffer before it can take one out for consumption. -

4. Process Synchronization
Lecture Notes for CS347: Operating Systems Mythili Vutukuru, Department of Computer Science and Engineering, IIT Bombay 4. Process Synchronization 4.1 Race conditions and Locks • Multiprogramming and concurrency bring in the problem of race conditions, where multiple processes executing concurrently on shared data may leave the shared data in an undesirable, inconsistent state due to concurrent execution. Note that race conditions can happen even on a single processor system, if processes are context switched out by the scheduler, or are inter- rupted otherwise, while updating shared data structures. • Consider a simple example of two threads of a process incrementing a shared variable. Now, if the increments happen in parallel, it is possible that the threads will overwrite each other’s result, and the counter will not be incremented twice as expected. That is, a line of code that increments a variable is not atomic, and can be executed concurrently by different threads. • Pieces of code that must be accessed in a mutually exclusive atomic manner by the contending threads are referred to as critical sections. Critical sections must be protected with locks to guarantee the property of mutual exclusion. The code to update a shared counter is a simple example of a critical section. Code that adds a new node to a linked list is another example. A critical section performs a certain operation on a shared data structure, that may temporar- ily leave the data structure in an inconsistent state in the middle of the operation. Therefore, in order to maintain consistency and preserve the invariants of shared data structures, critical sections must always execute in a mutually exclusive fashion. -

The Critical Section Problem Problem Description
The Critical Section Problem Problem Description Informally, a critical section is a code segment that accesses shared variables and has to be executed as an atomic action. The critical section problem refers to the problem of how to ensure that at most one process is executing its critical section at a given time. Important: Critical sections in different threads are not necessarily the same code segment! Concurrent Software Systems 2 1 Problem Description Formally, the following requirements should be satisfied: Mutual exclusion: When a thread is executing in its critical section, no other threads can be executing in their critical sections. Progress: If no thread is executing in its critical section, and if there are some threads that wish to enter their critical sections, then one of these threads will get into the critical section. Bounded waiting: After a thread makes a request to enter its critical section, there is a bound on the number of times that other threads are allowed to enter their critical sections, before the request is granted. Concurrent Software Systems 3 Problem Description In discussion of the critical section problem, we often assume that each thread is executing the following code. It is also assumed that (1) after a thread enters a critical section, it will eventually exit the critical section; (2) a thread may terminate in the non-critical section. while (true) { entry section critical section exit section non-critical section } Concurrent Software Systems 4 2 Solution 1 In this solution, lock is a global variable initialized to false. A thread sets lock to true to indicate that it is entering the critical section. -

Rtos Implementation of Non-Linear System Using Multi Tasking, Scheduling and Critical Section
Journal of Computer Science 10 (11): 2349-2357, 2014 ISSN: 1549-3636 © 2014 M. Sujitha et al ., This open access article is distributed under a Creative Commons Attribution (CC-BY) 3.0 license doi:10.3844/jcssp.2014.2349.2357 Published Online 10 (11) 2014 (http://www.thescipub.com/jcs.toc) RTOS IMPLEMENTATION OF NON-LINEAR SYSTEM USING MULTI TASKING, SCHEDULING AND CRITICAL SECTION 1Sujitha, M., 2V. Kannan and 3S. Ravi 1,3 Department of ECE, Dr. M.G.R. Educational and Research Institute University, Chennai, India 2Jeppiaar Institute of Technology, Kanchipuram, India Received 2014-04-21; Revised 2014-07-19; Accepted 2014-12-16 ABSTRACT RTOS based embedded systems are designed with priority based multiple tasks. Inter task communication and data corruptions are major constraints in multi-tasking RTOS system. This study we describe about the solution for these issues with an example Real-time Liquid level control system. Message queue and Mail box are used to perform inter task communication to improve the task execution time and performance of the system. Critical section scheduling is used to eliminate the data corruption. In this application process value monitoring is considered as critical. In critical section the interrupt disable time is the most important specification of a real time kernel. RTOS is used to keep the interrupt disable time to a minimum. The algorithm is studied with respect to task execution time and response of the interrupts. The study also presents the comparative analysis of the system with critical section and without critical section based on the performance metrics. Keywords: Critical Section, RTOS, Scheduling, Resource Sharing, Mailbox, Message Queue 1. -

Shared Memory Programming Models I
Shared Memory Programming Models I Stefan Lang Interdisciplinary Center for Scientific Computing (IWR) University of Heidelberg INF 368, Room 532 D-69120 Heidelberg phone: 06221/54-8264 email: [email protected] WS 14/15 Stefan Lang (IWR) Simulation on High-Performance Computers WS14/15 1/45 Shared Memory Programming Models I Communication by shared memory Critical section Mutual exclusion: Petersons algorithm OpenMP Barriers – Synchronisation of all processes Semaphores Stefan Lang (IWR) Simulation on High-Performance Computers WS14/15 2/45 Critical Section What is a critical section? We consider the following situation: Application consists of P concurrent processes, these are thus executed simultaneously instructions executed by one process are subdivided into interconnected groups ◮ critical sections ◮ uncritical sections Critical section: Sequence of instructions, that perform a read or write access on a shared variable. Instructions of a critical section that may not be performed simultaneously by two or more processes. → it is said only a single process may reside within the critical section. Stefan Lang (IWR) Simulation on High-Performance Computers WS14/15 3/45 Mutual Exclusion I 2 Types of synchronization can be distinguished Conditional synchronisation Mutual exclusion Mutual exclusion consists of an entry protocol and an exit protocol: Programm (Introduction of mutual exclusion) parallel critical-section { process Π[int p ∈{0,..., P − 1}] { while (1) { entry protocol; critical section; exit protocol; uncritical section; } } } Stefan Lang (IWR) Simulation on High-Performance Computers WS14/15 4/45 Mutual Exclusion II The following criteria have to be matched: 1 Mutual exclusion. At most one process executed the critical section at a time. -
Embedded Firmware Development Languages/Options
Module -4 Embedded System Design Concepts Characteristics & Quality Attributes of Embedded Systems Characteristics of Embedded System Each Embedded System possess a set of characteristics which are unique to it. Some important characteristics of embedded systems are: Application & Domain Specific Reactive & Real Time Operates in ‘harsh’ environment Distributed Small size and Weight Power Concerns Quality Attributes of Embedded Systems: Represent the non-functional requirements that needs to be addressed in the design of an embedded system. The various quality attributes that needs to be addressed in any embedded system development are broadly classified into Operational Quality Attributes Refers to the relevant quality attributes related to tan embedded system when it is in the operational mode or ‘online ’ mode Non-Operational Quality Attributes The Quality attributes that needs to be addressed for the product ‘not’ on the basis of operational aspects are grouped under this category Operational Quality Attributes Response Throughput Reliability Maintainability Security Safety Non-Operational Quality Attributes Testability & Debug-ability Evolvability Portability Time to Prototype and Market Per Unit and Total Cost Washing Machine – Application Specific Embedded System V Extensively used in Home Automation for washing and drying clothes V Contains User Interface units (I/O) like Keypads, Display unit, LEDs for accepting user inputs and providing visual indications V Contains sensors like, water level sensor, temperature -

Assembly Language Programming by James and Jarrod Parkes Abstract
Technical Course Curriculum and Annotated Bibliography CS308: Assembly Language Programming By James and Jarrod Parkes Abstract At the University of Alabama in Huntsville, the Computer Science (CS) Department is facing a decreased student interest in their CS 308 assembly language course. As a result, this new course curriculum and annotated bibliography have been created to restore excitement into the program. Since today's students are seeking innovative applications for programming, this curriculum teaches the 6502 assembly language with a focus on the Nintendo Entertainment System (NES)--a vintage video game console. While linearly covering the required assembly language material, this curriculum incorporates interactive examples from classic NES titles such as Super Mario and The Legend of Zelda. With this curriculum, CS professors are also given the tools to guiding students through the development of their very own NES video games. By the end of the curriculum, professors will be fully equipped to teach the 6502 assembly language while providing students the rewarding experience of game development. Additionally, the annotated bibliography includes supplementary texts and online articles to help reinforce topics for professors and students. Source: Google Images ii Table of Contents Introduction to the Assembly Language Course....................................................... 1! What is an Assembly Language? .................................................................................. 1! How is this Course Structured?................................................................................... -

The Mutual Exclusion Problem Part II: Statement and Solutions
56b The Mutual Exclusion Problem Part II: Statement and Solutions L. Lamport1 Digital Equipment Corporation 6 October 1980 Revised: 1 February 1983 1 May 1984 27 February 1985 June 26, 2000 To appear in Journal of the ACM 1Most of this work was performed while the author was at SRI International, where it was supported in part by the National Science Foundation under grant number MCS-7816783. Abstract The theory developed in Part I is used to state the mutual exclusion problem and several additional fairness and failure-tolerance requirements. Four “dis- tributed” N-process solutions are given, ranging from a solution requiring only one communication bit per process that permits individual starvation, to one requiring about N! communication bits per process that satisfies every reasonable fairness and failure-tolerance requirement that we can conceive of. Contents 1 Introduction 3 2TheProblem 4 2.1 Basic Requirements ........................ 4 2.2 Fairness Requirements ...................... 6 2.3 Premature Termination ..................... 8 2.4 Failure ............................... 10 3 The Solutions 14 3.1 The Mutual Exclusion Protocol ................. 15 3.2 The One-Bit Solution ...................... 17 3.3 A Digression ........................... 21 3.4 The Three-Bit Algorithm .................... 22 3.5 FCFS Solutions .......................... 26 4Conclusion 32 1 List of Figures 1 The One-Bit Algorithm: Process i ............... 17 2 The Three-Bit Algorithm: Process i .............. 24 3TheN-Bit FCFS Algorithm: Process i............. 28 4TheN!-Bit FCFS Algorithm: Process i. ............ 31 2 1 Introduction This is the second part of a two-part paper on the mutual exclusion problem. In Part I [9], we described a formal model of concurrent systems and used it to define a primitive interprocess communication mechanism (communica- tion variables) that assumes no underlying mutual exclusion.