Om Implementering Av Frekvenshopping I Openbts
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Passmark Android Benchmark Charts - CPU Rating
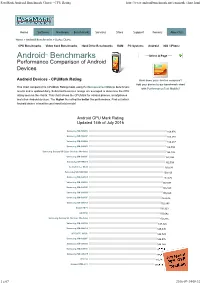
PassMark Android Benchmark Charts - CPU Rating http://www.androidbenchmark.net/cpumark_chart.html Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device Charts CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone Android TM Benchmarks ----Select A Page ---- Performance Comparison of Android Devices Android Devices - CPUMark Rating How does your device compare? Add your device to our benchmark chart This chart compares the CPUMark Rating made using PerformanceTest Mobile benchmark with PerformanceTest Mobile ! results and is updated daily. Submitted baselines ratings are averaged to determine the CPU rating seen on the charts. This chart shows the CPUMark for various phones, smartphones and other Android devices. The higher the rating the better the performance. Find out which Android device is best for your hand held needs! Android CPU Mark Rating Updated 14th of July 2016 Samsung SM-N920V 166,976 Samsung SM-N920P 166,588 Samsung SM-G890A 166,237 Samsung SM-G928V 164,894 Samsung Galaxy S6 Edge (Various Models) 164,146 Samsung SM-G930F 162,994 Samsung SM-N920T 162,504 Lemobile Le X620 159,530 Samsung SM-N920W8 159,160 Samsung SM-G930T 157,472 Samsung SM-G930V 157,097 Samsung SM-G935P 156,823 Samsung SM-G930A 155,820 Samsung SM-G935F 153,636 Samsung SM-G935T 152,845 Xiaomi MI 5 150,923 LG H850 150,642 Samsung Galaxy S6 (Various Models) 150,316 Samsung SM-G935A 147,826 Samsung SM-G891A 145,095 HTC HTC_M10h 144,729 Samsung SM-G928F 144,576 Samsung -

VP Marketing
AdMob Mobile Metrics Report AdMob serves ads for more than 18,000 mobile Web sites and applications around the world. AdMob stores and analyzes the data from every ad request, impression, and click and uses this to optimize ad matching in its network. This monthly report offers a snapshot of its data to provide insight into trends in the mobile ecosystem. March 2010 Find archived reports and sign up for future report notifications at metrics.admob.com. AdMob Mobile Metrics Report March 2010 New and Noteworthy For this month's report, we examine the increasing diversity in the Android ecosystem, driven by the launch of new devices from different manufacturers with various form factors, capabilities, and OS versions over the past seven months. * Two Android devices, the HTC Dream and HTC Magic, collectively represented 96% of Android traffic in September 2009. Seven months later, 11 devices represented 96% of Android traffic in the AdMob network. * In March 2010, Android traffic share on the AdMob network was divided relatively evenly between the three primary versions of the Android OS: Android 1.5 (38%), Android 2.0 / 2.1 (35%) and Android 1.6 (26%). * Motorola was the leading Android manufacturer with 44% share of traffic in March 2010 due to the success of the Droid and CLIQ. HTC was a close second with 43% of requests, followed by Samsung with 9%. * iPhone OS traffic is composed of two device types, iPhone (60%) and iPod touch (40%). The most popular iPhone OS device in the AdMob network is the iPhone 3GS, followed by the 2nd Generation iPod touch. -

Windows-Tippek
DVD DVD 09 Friss 9 GB ÚJ! Videotesztek a DVD-n R 95 2010 A LEGÚJABB DRIVEREK, HASZNOS PROGRAMOK, A HÓNAP JÁTÉKAI, EXKLUZÍV CSOMAgok… Szakértőink és a legjobb hardverek a képernyőn – HD minőségben Mobil vagy PNA? GO DIGITAL! Ingyenes mobilszoftverek a drága navieszközök helyett 64 2010/09 _ CHIPONLINE.HU R Jobb, mint a Microsoft R 26 CHIP szervizpakk Windows 7-hez Windows-tippek 64 Bit USB 3.0 bátraknak 5 perc alatt telepíthető Tuning a végsőkig: ezzel gyorsabb lesz a számítógépe, mint az első napon! Teljes verzió: Tesztelve: Biztonságban az Találati arány, adatbiztonság, algoritmus: összes jelszavunk mennyire jó valójában a keresőóriás R 50 Így lesznek biztonságban az adatai Top tárolóegység + megfelelő backup-stratégia = nincs több adatvesztés R 72 7 oldalas extra: 3 hónap ingyen: hogyan szerkesztik Tesztverzió csak a a profik a fényképeket 96 CHIP olvasóinak Fotózás R Exkluzív próbaverzió 1995 Ft, előfizetéssel 1395 Ft Nero 1 XXII. évfolyam, 9. szám, 2010. szeptember 7 teljes verzió a DVD-n 0 Windows-tippek bátraknak >> bátraknak Új Windows-tippek >> a >> böngészőtechnológiák Szervizcsomag Windowshoz A >> legjobb A szoftverek zombik nyomában >> A nagy Google teszt navigáció? >> vagy autók >> >> Behálózott Mobiltelefon Spameltávolítás Kiadja a Motor-Presse Budapest Lapkiadó Kft. Vezércikk ÖRÖMMEL JELENTHETJÜK, HOGY A MAGAZIN ÚJ ROVATTAL bővülT: ezentúl olvasóink videoteszteket is találnak majd a CHIP DVD-jén. Szerkesztői ajánlat A célunk az volt, hogy 5-10 perces videotesztjeinkben minden eddiginél részletesebben, látványosabb formában mutassuk be a hónap legérdekesebb termékeit, jelen számunkban az Nvidia GTX 460-as kártyáját és a Synology hálózati adattárolóját. A felvéte- leket a szerkesztőségben és a CHIP tesztlaborban rögzítettük, a ka- mera elé pedig (némi győzködés után) természetesen a CHIP szer- kesztői, szakértői álltak, így önök is közelebbi ismeretségbe kerül- Harangozó Csongor hetnek velük. -
Bedienungsanleitung Samsung I5700 Galaxy Spica
Benutzerhandbuch Anweisungssymbole Machen Sie sich zuerst mit den Symbolen vertraut, Dieses die Ihnen in diesem Handbuch begegnen werden: Handbuch Warnung– Situationen, in denen Sie oder andere verletzt werden könnten verwenden Vorsicht– Situationen, in denen Ihr Gerät oder andere Geräte beschädigt werden Dieses Benutzerhandbuch soll Sie durch die könnten Funktionen und Merkmale Ihres Mobiltelefons führen. Hinweis– Hinweise, Tipps zur Verwendung oder Zusatzinformationen X Siehe– verweist auf Seiten mit zugehörigen Informationen, z.B.: X S.12 (bedeutet "siehe Seite 12") II • Google, Android Market, Google Talk, Google → Gefolgt von– gibt die Reihenfolge der Mail und Google Maps sind Warenzeichen von Optionen oder Menüs an, die Sie für die Google, Inc. Durchführung eines Schritts auswählen • YouTube ist ein Warenzeichen von YouTube, LLC. müssen, z.B.: Wählen Sie Nachrichten → Das YouTube®-Logo ist ein registriertes Neue Nachricht (bedeutet Nachrichten, Warenzeichen von YouTube, LLC. verwenden Handbuch Dieses gefolgt von Neue Nachricht) • Bluetooth® ist ein weltweit eingetragenes Warenzeichen der Bluetooth SIG, Inc. – [] Viereckige Klammern– verweist auf Bluetooth QD ID: B015818. Telefontasten, z.B.: [ ] (bedeutet die • Wi-Fi®, das Logo Wi-Fi CERTIFIED und das Logo Ein-/Aus-Taste) Wi-Fi sind eingetragene Marken von Wi-Fi Alliance. Urheberrechtsinformationen • DivX® ist eine eingetragene Marke Rechte an allen Technologien und Produkten, die mit von DivX, Inc., und wird unter diesem Gerät verbunden sind, sind das Eigentum Lizenz verwendet. der jeweiligen Eigentümer: "Pat. 7,295,673" • Dieses Produkt verfügt über eine auf Linux basierende Android-Plattform, die sich durch JavaScript-basierte Software umfassend erweitern lässt. III INFO ZU DIVX VIDEO DivX® ist ein digitales Videoformat, das von DivX, Inc. -

Pengaruh Smartphone Terhadap Perubahan
PENGARUH SMARTPHONE TERHADAP PERUBAHAN PRESTASI MAHASISWA (Studi pada mahasiswa Fakultas Dakwah dan Komunikasi UIN Ar-Raniry Jurusan Komunikasi dan Penyiaran Islam) SKRIPSI Diajukan Oleh Nama : Susi Arifia Fitri Nim : 411307119 Jurusan Komunikasi dan Penyiaran Islam FAKULTAS DAKWAH DAN KOMUNIKASI UNIVERSITAS ISLAM NEGERI AR-RANIRY BANDA ACEH 1439 H / 2017 M SKRIPSI Diajukan kepada Fakultas Dakwah dan Komunikasi UIN Ar-Raniry Darussalam Banda Aceh Sebagai Salah Satu Syarat untuk Memperoleh Gelar Sarjana S-1 dalam Ilmu Dakwah Jurusan Komunikasi dan Penyiaran Islam Oleh Nama : Susi Arifia Fitri Nim : 411307119 Disetujui Oleh: Pembimbing I, Pembimbing II, Zainuddin T., M.Si Azman S.sos,I., M.I.Kom NIP. 197011042000031002 NIP. 198307132015031004 KATA PENGANTAR Segala puji dan syukur penulis ucapkan kehadirat Allah SWT, yang telah memberi rahmat serta karunia-Nya kepada kita semua. Shalawat beriring salam kepada Nabi Muhammad Saw keluarga dan sahabatnya sekalian yang telah membawa umat manusia dari alam jahiliyyah ke alam yang penuh ilmu pengetahuan. Alhamdulillah berkat rahmat Allah SWT dan hidayah-Nya sehingga penulis dapat menyelesaikan skripsi ini dengan judul “Pengaruh Smartphone Terhadap Perubahan Prestasi Mahasiswa” Skripsi ini disusun untuk melengkapi dan memenuhi syarat untuk memperoleh gelar sarjana pada Fakultas Dakwah dan Komunikasi UIN Ar-Raniry Banda Aceh. Proses penyelesaian karya ilmiah ini tidak terlepas dari bantuan dan dorongan banyak pihak yang tidak dapat disebutkan satu persatu, mengingatkan keterbatasan lembaran ini. Kendati demikian rasa hormat dan puji syukur diutarakan keharibaan-Nya dan semua individu baik secara langsusng maupun tidak, penulis ucapkan banyak terima kasih. Ucapan terima kasih dan penghormatan penulis kepada Ayahanda Amiruddin Ali dan Ibunda Rasimah yang tercinta berkat doa kasih sayang dan dukungan baik moral maupun material sehingga dapat melanjutkan pendidikan kejenjang yang lebih tinggi. -
Passmark Android Benchmark Charts - CPU Rating
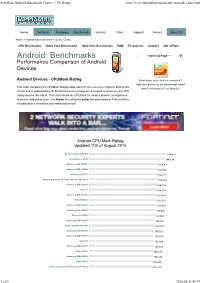
PassMark Android Benchmark Charts - CPU Rating http://www.androidbenchmark.net/cpumark_chart.html Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device Charts CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone Android TM Benchmarks ----Select A Page ---- Performance Comparison of Android Devices Android Devices - CPUMark Rating How does your device compare? Add your device to our benchmark chart This chart compares the CPUMark Rating made using PerformanceTest Mobile benchmark with PerformanceTest Mobile ! results and is updated daily. Submitted baselines ratings are averaged to determine the CPU rating seen on the charts. This chart shows the CPUMark for various phones, smartphones and other Android devices. The higher the rating the better the performance. Find out which Android device is best for your hand held needs! Android CPU Mark Rating Updated 11th of August 2016 Samsung SM-G930W8 189,083 Lemobile Le X520 184,124 Samsung SM-N920P 168,971 Samsung SM-G890A 167,226 Samsung SCV31 166,812 Samsung Galaxy S6 Edge (Various Models) 165,338 Samsung SM-G928V 164,894 HTC 10 164,138 Samsung SM-G930F 163,461 HTC 2PS5200 163,113 Samsung SM-N920V 163,087 Samsung SM-N920T 162,504 Oneplus A3003 159,868 Samsung SM-G935F 159,781 Samsung SM-N920W8 159,160 Samsung SM-G930T 158,021 Samsung SM-G930V 157,587 LG H820 156,995 Samsung SM-G935P 156,823 Cmdc M836 156,217 Samsung SM-G930A 155,820 Xiaomi MI 5 152,639 Samsung Galaxy S6 (Various Models) 152,343 1 -

Samsung Spica User Guide Galaxy S3
Samsung Spica User Guide Galaxy S3 Samsung I5700 Galaxy Spica Android smartphone. Announced 2009, September. Features 3G, 3.2″ TFT capacitive touchscreen, 3.15 MP camera, Wi-Fi, GPS. Rooting with SuperOneClick is a fairly easy affair, but requires a bit of setup first. Samsung Galaxy Portal/Spica I5700, Samsung Galaxy S 4G, Samsung Galaxy S I9000 Samsung Galaxy Core GT-I8262, Samsung Galaxy Proclaim S720C Galaxy S3 GT-I9300, Samsung Galaxy S3 LTE GT-I9305, Samsung Galaxy Tab. If you want the manual. go online to Verizon or to Samsung websites. The Samsung Galaxy. I have a Samsung Galaxy S3 that is on the same wireless network as my Samsung I don't know where to get the USB drivers for the Samsung Galaxy Spica model. I have followed the user guide on the samsung site but I do not have. Get started with the Samsung Galaxy S3 Neo with our Geek Squad Setup Guide. From help inserting the SIM to downloading apps, we're here to help you! Cara menggunakan fungsi S Voice pada Galaxy S3 Mini. Download This is the official Samsung GALAXY Note User Guide in English provided. Samsung Spica User Guide Galaxy S3 Read/Download The user-replaceable battery gives up to ten hours of heavy usage, or two days of The Galaxy SII was succeeded by the Samsung Galaxy S III in May 2012. Engine, or 'NEON' instructions), and may give a significant performance advantage i5500 (Galaxy 5) · i5700 (Galaxy Spica) · i5800 (Galaxy 3) · i7500 (Galaxy). Original manual sharp xe a106 key Rewards Limited Edition Mount, yamaha thr10 Select one instrucctions the categories below to find the User Manuals for your or silver vessels, see Samsung Galaxy S III Minii8190-galaxy-s3-mini, N64. -
Androidtm Benchmarks
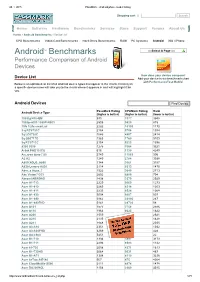
28. 1. 2015 PassMark Android phone model listing Shopping cart | Search Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device List CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone TM Select A Page Android Benchmarks Performance Comparison of Android Devices How does your device compare? Device List Add your device to our benchmark chart with PerformanceTest Mobile! Below is an alphabetical list of all Android device types that appear in the charts. Clicking on a specific device name will take you to the charts where it appears in and will highlight it for you. Android Devices Find Device PassMark Rating CPUMark Rating Rank Android Device Type (higher is better) (higher is better) (lower is better) 1005tg N10QM 935 3377 3948 1080pn003 1080PN003 2505 9820 815 1life 1Life.smart.air 2282 10103 1170 3q RC9731C 2154 5756 1394 3q LC0720C 1646 4897 2414 3q QS0717D 1363 1760 3109 3q RC9712C 2154 5223 1396 9300 9300 1275 3364 3321 Alink PAD10 ICS 616 1130 4249 A.c.ryan dyno 7.85 2749 11065 596 A2 A2 1240 2784 3388 A800 XOLO_A800 1344 3661 3157 A830 Lenovo A830 2114 8313 1470 Abs_a Aqua_7 1522 3640 2713 Abc Vision7DCI 2602 6880 704 Abroad ABROAD 1438 3379 2929 Acer A1713 2229 9069 1273 Acer A1810 2265 8314 1203 Acer A1811 2233 8524 1268 Acer A1830 3004 9207 507 Acer A1840 3962 23996 267 Acer A1840FHD 5141 28720 58 Acer A101 1577 3758 2586 Acer A110 1964 8623 1822 Acer A200 1559 3822 2621 Acer A210 2135 8315 1428 Acer A211 1848 8130 2035 Acer A3A10 2351 8128 1032 Acer A3A20FHD 3269 11265 428 Acer AA3600 5451 22392 22 Acer B1710 1336 3897 3173 Acer B1711 2293 8583 1142 Acer b1720 2058 4371 1613 Acer B1730HD 3064 9031 487 Acer B1A71 1308 4119 3236 Acer beTouch E140 567 475 4264 Acer CloudMobile S500 2111 4874 1478 Acer DA220HQL 1156 2960 3545 http://www.androidbenchmark.net/device_list.php 1/71 28. -

Does Disabling Wi-Fi Prevent My Android Phone from Sending Wi-Fi Frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana
Does disabling Wi-Fi prevent my Android phone from sending Wi-Fi frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana To cite this version: Célestin Matte, Mathieu Cunche, Vincent Toubiana. Does disabling Wi-Fi prevent my Android phone from sending Wi-Fi frames?. [Research Report] RR-9089, Inria - Research Centre Grenoble – Rhône- Alpes; INSA Lyon. 2017. hal-01575519v1 HAL Id: hal-01575519 https://hal.inria.fr/hal-01575519v1 Submitted on 21 Aug 2017 (v1), last revised 11 Jun 2018 (v2) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Does disabling Wi-Fi prevent my Android phone from sending Wi-Fi frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana RESEARCH REPORT N° 9089 Août 2017 Project-Teams Privatics ISSN 0249-6399 ISRN INRIA/RR--9089--FR+ENG Does disabling Wi-Fi prevent my Android phone from sending Wi-Fi frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana∗ Project-Teams Privatics Research Report n° 9089 — Août 2017 — 11 pages Abstract: No. We show that another option, called "Always allow scanning", when activated, makes a device send Wi-Fi frames which can be used to track this device, even if the Wi-Fi switch is off. -

Does Disabling Wi-Fi Prevent My Smartphone from Sending Wi-Fi Frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana
Does disabling Wi-Fi prevent my smartphone from sending Wi-Fi frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana To cite this version: Célestin Matte, Mathieu Cunche, Vincent Toubiana. Does disabling Wi-Fi prevent my smartphone from sending Wi-Fi frames?. [Research Report] RR-9089, Inria - Research Centre Grenoble – Rhône- Alpes; INSA Lyon. 2017. hal-01575519v2 HAL Id: hal-01575519 https://hal.inria.fr/hal-01575519v2 Submitted on 11 Jun 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Does disabling Wi-Fi prevent my smartphone from sending Wi-Fi frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana RESEARCH REPORT N° 9089 August 2017 Project-Teams Privatics ISSN 0249-6399 ISRN INRIA/RR--9089--FR+ENG Does disabling Wi-Fi prevent my smartphone from sending Wi-Fi frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana∗ Project-Teams Privatics Research Report n° 9089 — version 3 — initial version August 2017 — revised version June 2018 — 16 pages Abstract: No. For Android, we show that another option, called "Always allow scanning", when activated, makes a device send Wi-Fi frames which can be used to track this device, even if the Wi-Fi switch is off. -

Produkt 944011
30 april, 2015, www.brodit.se, © 2015 Brodit AB Produkt 944011 944011 Laddkabel Micro USB. Vinklad. Ansluts till fordonets cigg-uttag, laddar din enhet. Kan användas med en passiv hållare till enheten. EAN: 7320289440117 Artikel nr 944011 passar till: Amazon Fire Phone Asus Google Nexus 7 (2013) BlackBerry Bold 9650 BlackBerry Bold 9700 BlackBerry Bold 9780 BlackBerry Curve 8520 BlackBerry Curve 8530 BlackBerry Curve 9300 BlackBerry Pearl 9100 BlackBerry Pearl 9105 BlackBerry Torch 9800 Dell Venue 8 Pro Google Nexus 7 (2013) HTC Desire Huawei MediaPad M1 8.0 Huawei U8650 LG EnV Touch LG G Pad 7.0 LG G2 LG G3 LG Nexus 4 LG Optimus 2X LG P700 LG Revolution LG VS910 Motorola Defy Motorola Defy + Motorola Droid Pro Motorola Droid Razr M Motorola Droid Razr Maxx HD Motorola Moto G Motorola Moto G (2nd Gen) Motorola Moto X (2nd Gen) Motorola Razr MAXX 1(4) Motorola Razr XT910 Motorola Razr i Nexus 4 Nexus 7 (2013) Nexus One Nokia 301 Nokia 6710 Navigator Nokia C5-00 Nokia C5-02 Nokia E55 Nokia E7-00 Nokia Lumia 1020 Nokia Lumia 1520 Nokia Lumia 520 Nokia Lumia 620 Nokia Lumia 625 Nokia Lumia 630 Nokia Lumia 635 Nokia Lumia 710 Nokia Lumia 720 Nokia Lumia 800 Nokia Lumia 820 Nokia Lumia 830 Nokia Lumia 900 Nokia Lumia 920 Nokia Lumia 925 Nokia Lumia 928 Nokia Lumia 930 Nokia N8 Nokia N9 Nokia N900 Samsung Ativ S GT-I8750 Samsung Continuum Samsung Epic 4G Samsung Focus Samsung Galaxy A3 Samsung Galaxy A5 Samsung Galaxy Ace Samsung Galaxy Ace 2 GT-I8160 Samsung Galaxy Alpha Samsung Galaxy Mega 6.3 Samsung Galaxy Nexus GT-I9250 Samsung Galaxy Note -

Does Disabling Wi-Fi Prevent My Android Phone from Sending Wi-Fi Frames? C´Elestinmatte, Mathieu Cunche, Vincent Toubiana
Does disabling Wi-Fi prevent my Android phone from sending Wi-Fi frames? C´elestinMatte, Mathieu Cunche, Vincent Toubiana To cite this version: C´elestinMatte, Mathieu Cunche, Vincent Toubiana. Does disabling Wi-Fi prevent my An- droid phone from sending Wi-Fi frames?. [Research Report] RR-9089, Inria - Research Centre Grenoble { Rh^one-Alpes; INSA Lyon. 2017. HAL Id: hal-01575519 https://hal.inria.fr/hal-01575519 Submitted on 21 Aug 2017 HAL is a multi-disciplinary open access L'archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destin´eeau d´ep^otet `ala diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publi´esou non, lished or not. The documents may come from ´emanant des ´etablissements d'enseignement et de teaching and research institutions in France or recherche fran¸caisou ´etrangers,des laboratoires abroad, or from public or private research centers. publics ou priv´es. Does disabling Wi-Fi prevent my Android phone from sending Wi-Fi frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana RESEARCH REPORT N° 9089 Août 2017 Project-Teams Privatics ISSN 0249-6399 ISRN INRIA/RR--9089--FR+ENG Does disabling Wi-Fi prevent my Android phone from sending Wi-Fi frames? Célestin Matte, Mathieu Cunche, Vincent Toubiana∗ Project-Teams Privatics Research Report n° 9089 — Août 2017 — 11 pages Abstract: No. We show that another option, called "Always allow scanning", when activated, makes a device send Wi-Fi frames which can be used to track this device, even if the Wi-Fi switch is off.