The Effect of Rotation on the Flattening of Celestial Bodies: a Journey Through Four Centuries
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Apparent Size of Celestial Objects
NATURE [April 7, 1870 daher wie schon fri.jher die Vor!esungen Uber die Warme, so of rectifying, we assume. :J'o me the Moon at an altit11de of auch jetzt die vorliegenden Vortrage Uber d~n Sc:hall unter 1~rer 45° is about (> i!lches in diameter ; when near the horizon, she is besonderen Aufsicht iibersetzen lasse~, und die :On1ckbogen e1µer about a foot. If I look through a telescope of small ruag11ifyjng genauen Durchsicht unterzogen, dam1t auch die deutsche J3ear power (say IO or 12 diameters), sQ as to leave a fair margin in beitung den englischen Werken ihres Freundes Tyndall nach the field, the Moon is still 6 inches in diameter, though her Form und Inhalt moglichst entsprache.-H. :fIEL!>iHOLTZ, G. visible area has really increased a hundred:fold. WIEDEMANN." . Can we go further than to say, as has often been said, that aH Prof. Tyndall's work, his account of Helmhqltz's Theory of magnitudi; is relative, and that nothing is great or small except Dissonance included, having passed through the hands of Helm by comparison? · · W. R. GROVE, holtz himself, not only without protest or correction, bnt with u5, Harley Street, April 4 the foregoing expression of opinion, it does not seem lihly that any serious dimag'e has been done.] · An After Pirm~. Jl;xperim1mt SUPPOSE in the experiment of an ellipsoid or spheroid, referred Apparent Size of Celestial Qpjecti:; to in my last letter, rolling between two parallel liorizontal ABOUT fifteen years ago I was looking at Venus through a planes, we were to scratch on the rolling body the two equal 40-inch telescope, Venus then being very near the Moon and similar and opposite closed curves (the polhods so-called), traced of a crescent form, the line across the middle or widest part upon it by the successive axes of instantaneou~ solutioll ; and of the crescent being about one-tenth of the planet's diameter. -

Introduction to Astronomy from Darkness to Blazing Glory
Introduction to Astronomy From Darkness to Blazing Glory Published by JAS Educational Publications Copyright Pending 2010 JAS Educational Publications All rights reserved. Including the right of reproduction in whole or in part in any form. Second Edition Author: Jeffrey Wright Scott Photographs and Diagrams: Credit NASA, Jet Propulsion Laboratory, USGS, NOAA, Aames Research Center JAS Educational Publications 2601 Oakdale Road, H2 P.O. Box 197 Modesto California 95355 1-888-586-6252 Website: http://.Introastro.com Printing by Minuteman Press, Berkley, California ISBN 978-0-9827200-0-4 1 Introduction to Astronomy From Darkness to Blazing Glory The moon Titan is in the forefront with the moon Tethys behind it. These are two of many of Saturn’s moons Credit: Cassini Imaging Team, ISS, JPL, ESA, NASA 2 Introduction to Astronomy Contents in Brief Chapter 1: Astronomy Basics: Pages 1 – 6 Workbook Pages 1 - 2 Chapter 2: Time: Pages 7 - 10 Workbook Pages 3 - 4 Chapter 3: Solar System Overview: Pages 11 - 14 Workbook Pages 5 - 8 Chapter 4: Our Sun: Pages 15 - 20 Workbook Pages 9 - 16 Chapter 5: The Terrestrial Planets: Page 21 - 39 Workbook Pages 17 - 36 Mercury: Pages 22 - 23 Venus: Pages 24 - 25 Earth: Pages 25 - 34 Mars: Pages 34 - 39 Chapter 6: Outer, Dwarf and Exoplanets Pages: 41-54 Workbook Pages 37 - 48 Jupiter: Pages 41 - 42 Saturn: Pages 42 - 44 Uranus: Pages 44 - 45 Neptune: Pages 45 - 46 Dwarf Planets, Plutoids and Exoplanets: Pages 47 -54 3 Chapter 7: The Moons: Pages: 55 - 66 Workbook Pages 49 - 56 Chapter 8: Rocks and Ice: -
Geodesy Methods Over Time
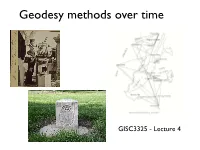
Geodesy methods over time GISC3325 - Lecture 4 Astronomic Latitude/Longitude • Given knowledge of the positions of an astronomic body e.g. Sun or Polaris and our time we can determine our location in terms of astronomic latitude and longitude. US Meridian Triangulation This map shows the first project undertaken by the founding Superintendent of the Survey of the Coast Ferdinand Hassler. Triangulation • Method of indirect measurement. • Angles measured at all nodes. • Scaled provided by one or more precisely measured base lines. • First attributed to Gemma Frisius in the 16th century in the Netherlands. Early surveying instruments Left is a Quadrant for angle measurements, below is how baseline lengths were measured. A non-spherical Earth • Willebrod Snell van Royen (Snellius) did the first triangulation project for the purpose of determining the radius of the earth from measurement of a meridian arc. • Snellius was also credited with the law of refraction and incidence in optics. • He also devised the solution of the resection problem. At point P observations are made to known points A, B and C. We solve for P. Jean Picard’s Meridian Arc • Measured meridian arc through Paris between Malvoisine and Amiens using triangulation network. • First to use a telescope with cross hairs as part of the quadrant. • Value obtained used by Newton to verify his law of gravitation. Ellipsoid Earth Model • On an expedition J.D. Cassini discovered that a one-second pendulum regulated at Paris needed to be shortened to regain a one-second oscillation. • Pendulum measurements are effected by gravity! Newton • Newton used measurements of Picard and Halley and the laws of gravitation to postulate a rotational ellipsoid as the equilibrium figure for a homogeneous, fluid, rotating Earth. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

Models for Earth and Maps
Earth Models and Maps James R. Clynch, Naval Postgraduate School, 2002 I. Earth Models Maps are just a model of the world, or a small part of it. This is true if the model is a globe of the entire world, a paper chart of a harbor or a digital database of streets in San Francisco. A model of the earth is needed to convert measurements made on the curved earth to maps or databases. Each model has advantages and disadvantages. Each is usually in error at some level of accuracy. Some of these error are due to the nature of the model, not the measurements used to make the model. Three are three common models of the earth, the spherical (or globe) model, the ellipsoidal model, and the real earth model. The spherical model is the form encountered in elementary discussions. It is quite good for some approximations. The world is approximately a sphere. The sphere is the shape that minimizes the potential energy of the gravitational attraction of all the little mass elements for each other. The direction of gravity is toward the center of the earth. This is how we define down. It is the direction that a string takes when a weight is at one end - that is a plumb bob. A spirit level will define the horizontal which is perpendicular to up-down. The ellipsoidal model is a better representation of the earth because the earth rotates. This generates other forces on the mass elements and distorts the shape. The minimum energy form is now an ellipse rotated about the polar axis. -

World Geodetic System 1984
World Geodetic System 1984 Responsible Organization: National Geospatial-Intelligence Agency Abbreviated Frame Name: WGS 84 Associated TRS: WGS 84 Coverage of Frame: Global Type of Frame: 3-Dimensional Last Version: WGS 84 (G1674) Reference Epoch: 2005.0 Brief Description: WGS 84 is an Earth-centered, Earth-fixed terrestrial reference system and geodetic datum. WGS 84 is based on a consistent set of constants and model parameters that describe the Earth's size, shape, and gravity and geomagnetic fields. WGS 84 is the standard U.S. Department of Defense definition of a global reference system for geospatial information and is the reference system for the Global Positioning System (GPS). It is compatible with the International Terrestrial Reference System (ITRS). Definition of Frame • Origin: Earth’s center of mass being defined for the whole Earth including oceans and atmosphere • Axes: o Z-Axis = The direction of the IERS Reference Pole (IRP). This direction corresponds to the direction of the BIH Conventional Terrestrial Pole (CTP) (epoch 1984.0) with an uncertainty of 0.005″ o X-Axis = Intersection of the IERS Reference Meridian (IRM) and the plane passing through the origin and normal to the Z-axis. The IRM is coincident with the BIH Zero Meridian (epoch 1984.0) with an uncertainty of 0.005″ o Y-Axis = Completes a right-handed, Earth-Centered Earth-Fixed (ECEF) orthogonal coordinate system • Scale: Its scale is that of the local Earth frame, in the meaning of a relativistic theory of gravitation. Aligns with ITRS • Orientation: Given by the Bureau International de l’Heure (BIH) orientation of 1984.0 • Time Evolution: Its time evolution in orientation will create no residual global rotation with regards to the crust Coordinate System: Cartesian Coordinates (X, Y, Z). -

TIDAL THEORY By: Paul O’Hargan
TIDAL THEORY By: Paul O’Hargan (1Tidaltheory.doc, revision – 12/14/2000) INTRODUCTION The word "tides" is a generic term used to define the alternating rise and fall in sea level with respect to the land, produced, in part, by the gravitational attraction of the moon and sun. There are additional nonastronomical factors influencing local heights and times of tides such as configuration of the coastline, depth of the water, ocean-floor topography, and other hydrographic and meteorological influences. Knowledge of these heights and times is important in practical applications such as navigation, harbor construction, tidal datums for hydrography and for mean high water line survey procedures, the determination of base lines for fixing offshore territorial limits and for tide predictions. ORIGIN OF ASTRONOMICAL TIDE RAISING FORCES At the surface of the earth, the earth's force of gravitational attraction acts in a direction toward its center, and thus holds the ocean waters confined to this surface. However, the gravitational forces of the moon and sun also act externally upon the earth's ocean waters. These external forces are exerted as tide producing forces, called tractive forces. To all outward appearances, the moon revolves around the earth, but in actuality, the moon and earth revolve together around their common center of mass called the barycenter. The two astronomical bodies are held together by gravitational attraction, but are simultaneously kept apart by an equal and opposite centrifugal force. At the earth's surface an imbalance between these two forces results in the fact that there exists, on the side of the earth turned toward the moon, a net tide producing force which acts in the direction of the moon. -

Solar System KEY.Pdf
Solar System 1. The diagram below represents a simple geocentric model. Which object is represented by the letter X? A) Earth B) Sun C) Moon D) Polaris 2. Which object orbits Earth in both the Earth-centered (geocentric) and Sun-centered (heliocentric) models of our solar system? A) the Moon B) the Sun C) Venus D) Polaris 3. In which type of model are the Sun, other stars, and the Moon in orbit around the Earth? A) heliocentric model B) tetrahedral model C) concentric model D) geocentric model 4. The diagram below shows one model of a portion of the universe. What type of model does the diagram best demonstrate? A) a heliocentric model, in which celestial objects orbit Earth B) a heliocentric model, in which celestial objects orbit the Sun C) a geocentric model, in which celestial objects orbit Earth D) a geocentric model, in which celestial objects orbit the Sun 5. Which diagram represents a geocentric model? [Key: E = Earth, P = Planet, S = Sun] A) B) C) D) 6. Which statement best describes the geocentric model of our solar system? A) The Earth is located at the center of the model. B) All planets revolve around the Sun. C) The Sun is located at the center of the model. D) All planets except the Earth revolve around the Sun. 7. Which apparent motion can be explained by a geocentric model? A) deflection of the wind B) curved path of projectiles C) motion of a Foucault pendulum D) the sun's path through the sky 8. In the geocentric model (the Earth at the center of the universe), which motion would occur? A) The Earth would revolve around the Sun. -

Lecture 1: Introduction to Ocean Tides
Lecture 1: Introduction to ocean tides Myrl Hendershott 1 Introduction The phenomenon of oceanic tides has been observed and studied by humanity for centuries. Success in localized tidal prediction and in the general understanding of tidal propagation in ocean basins led to the belief that this was a well understood phenomenon and no longer of interest for scientific investigation. However, recent decades have seen a renewal of interest for this subject by the scientific community. The goal is now to understand the dissipation of tidal energy in the ocean. Research done in the seventies suggested that rather than being mostly dissipated on continental shelves and shallow seas, tidal energy could excite far traveling internal waves in the ocean. Through interaction with oceanic currents, topographic features or with other waves, these could transfer energy to smaller scales and contribute to oceanic mixing. This has been suggested as a possible driving mechanism for the thermohaline circulation. This first lecture is introductory and its aim is to review the tidal generating mechanisms and to arrive at a mathematical expression for the tide generating potential. 2 Tide Generating Forces Tidal oscillations are the response of the ocean and the Earth to the gravitational pull of celestial bodies other than the Earth. Because of their movement relative to the Earth, this gravitational pull changes in time, and because of the finite size of the Earth, it also varies in space over its surface. Fortunately for local tidal prediction, the temporal response of the ocean is very linear, allowing tidal records to be interpreted as the superposition of periodic components with frequencies associated with the movements of the celestial bodies exerting the force. -
Astronomy: Space Systems
Solar system SCIENCE Astronomy: Space Systems Teacher Guide Patterns in the night sky Space exploration Eclipses CKSci_G5Astronomy Space Systems_TG.indb 1 27/08/19 8:07 PM CKSci_G5Astronomy Space Systems_TG.indb 2 27/08/19 8:07 PM Astronomy: Space Systems Teacher Guide CKSci_G5Astronomy Space Systems_TG.indb 1 27/08/19 8:07 PM Creative Commons Licensing This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. You are free: to Share—to copy, distribute, and transmit the work to Remix—to adapt the work Under the following conditions: Attribution—You must attribute the work in the following manner: This work is based on an original work of the Core Knowledge® Foundation (www.coreknowledge.org) made available through licensing under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. This does not in any way imply that the Core Knowledge Foundation endorses this work. Noncommercial—You may not use this work for commercial purposes. Share Alike—If you alter, transform, or build upon this work, you may distribute the resulting work only under the same or similar license to this one. With the understanding that: For any reuse or distribution, you must make clear to others the license terms of this work. The best way to do this is with a link to this web page: https://creativecommons.org/licenses/by-nc-sa/4.0/ Copyright © 2019 Core Knowledge Foundation www.coreknowledge.org All Rights Reserved. Core Knowledge®, Core Knowledge Curriculum Series™, Core Knowledge Science™, and CKSci™ are trademarks of the Core Knowledge Foundation. -

12.002 Physics and Chemistry of the Earth and Terrestrial Planets Fall 2008
MIT OpenCourseWare http://ocw.mit.edu 12.002 Physics and Chemistry of the Earth and Terrestrial Planets Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 55 Gravity Anomalies For a sphere with mass M, the gravitational potential field Vg ouside of the sphere is: MG V = " g r -11 3 -1 -2 where G is the universal gravitational constant (6.67300 × 10 m kg s ) and r is dis!ta nce from the center of the sphere. The gravitational field is related to the potential field by: MG r ˆ g = "#Vg = " 2 r r again provided that the field is measured outside of the sphere. ! Planetary Reference Gravity Field Because planets are not spheres, but rather slightly oblate spheroids (because of their rotation around the spin axis), the gravitational field is not quite that of a sphere. For an oblate spheroid, the magnitude of the gravitational field has terms proportional to the sign of the latitude, or: MG g = + Asin2 " + Bsin4 " r2 This is called the “reference gravity field”. If we want to look at gravity due to mass anom! alies within the crust and mantle, we need to first subtract off the reference gravity field from the observed gravity field to look at what is left over that is due to mass anomalies or dynamic processes that result in mass anomalies. On earth g at the surface is 9.81 m/s2, while the anomalies we want to look at are 4 or 5 orders of magnitude smaller. -
![Arxiv:1905.08907V1 [Astro-Ph.EP] 22 May 2019 Ture and Interior Rotation Rate, Matched to the Cassini the Gravitational Potential](https://docslib.b-cdn.net/cover/4235/arxiv-1905-08907v1-astro-ph-ep-22-may-2019-ture-and-interior-rotation-rate-matched-to-the-cassini-the-gravitational-potential-2174235.webp)
Arxiv:1905.08907V1 [Astro-Ph.EP] 22 May 2019 Ture and Interior Rotation Rate, Matched to the Cassini the Gravitational Potential
Models of Saturn's Interior Constructed with Accelerated Concentric Maclaurin Spheroid Method B. Militzer Department of Earth and Planetary Science, University of California, Berkeley, CA 94720 and Department of Astronomy, University of California, Berkeley, CA 94720 S. Wahl Department of Earth and Planetary Science, University of California, Berkeley, CA 94720 W. B. Hubbard Lunar and Planetary Laboratory, University of Arizona, Tucson, AZ 85721 The Cassini spacecraft's Grand Finale orbits provided a unique opportunity to probe Saturn's gravity field and interior structure. Doppler measurements [21] yielded unexpectedly large values for the gravity harmonics J6, J8, and J10 that cannot be matched with planetary interior mod- els that assume uniform rotation. Instead we present a suite of models that assume the planet's interior rotates on cylinders, which allows us to match all the observed even gravity harmonics. For every interior model, the gravity field is calculated self-consistently with high precision using the Concentric Maclaurin Spheroid (CMS) method. We present an acceleration technique for this method, which drastically reduces the computational cost, allows us to efficiently optimize model parameters, map out allowed parameter regions with Monte Carlo sampling, and increases the pre- cision of the calculated J2n gravity harmonics to match the error bars of the observations, which would be difficult without acceleration. Based on our models, Saturn is predicted to have a dense central core of ∼15{18 Earth masses and an additional 1.5{5 Earth masses of heavy elements in the envelope. Finally, we vary the rotation period in the planet's deep interior and determine the resulting oblateness, which we compare with the value from radio occultation measurements by the Voyager spacecraft.