Radius of the Earth - Radii Used in Geodesy James R
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 11. Three Dimensional Analytic Geometry and Vectors
Chapter 11. Three dimensional analytic geometry and vectors. Section 11.5 Quadric surfaces. Curves in R2 : x2 y2 ellipse + =1 a2 b2 x2 y2 hyperbola − =1 a2 b2 parabola y = ax2 or x = by2 A quadric surface is the graph of a second degree equation in three variables. The most general such equation is Ax2 + By2 + Cz2 + Dxy + Exz + F yz + Gx + Hy + Iz + J =0, where A, B, C, ..., J are constants. By translation and rotation the equation can be brought into one of two standard forms Ax2 + By2 + Cz2 + J =0 or Ax2 + By2 + Iz =0 In order to sketch the graph of a quadric surface, it is useful to determine the curves of intersection of the surface with planes parallel to the coordinate planes. These curves are called traces of the surface. Ellipsoids The quadric surface with equation x2 y2 z2 + + =1 a2 b2 c2 is called an ellipsoid because all of its traces are ellipses. 2 1 x y 3 2 1 z ±1 ±2 ±3 ±1 ±2 The six intercepts of the ellipsoid are (±a, 0, 0), (0, ±b, 0), and (0, 0, ±c) and the ellipsoid lies in the box |x| ≤ a, |y| ≤ b, |z| ≤ c Since the ellipsoid involves only even powers of x, y, and z, the ellipsoid is symmetric with respect to each coordinate plane. Example 1. Find the traces of the surface 4x2 +9y2 + 36z2 = 36 1 in the planes x = k, y = k, and z = k. Identify the surface and sketch it. Hyperboloids Hyperboloid of one sheet. The quadric surface with equations x2 y2 z2 1. -

Radar Back-Scattering from Non-Spherical Scatterers
REPORT OF INVESTIGATION NO. 28 STATE OF ILLINOIS WILLIAM G. STRATION, Governor DEPARTMENT OF REGISTRATION AND EDUCATION VERA M. BINKS, Director RADAR BACK-SCATTERING FROM NON-SPHERICAL SCATTERERS PART 1 CROSS-SECTIONS OF CONDUCTING PROLATES AND SPHEROIDAL FUNCTIONS PART 11 CROSS-SECTIONS FROM NON-SPHERICAL RAINDROPS BY Prem N. Mathur and Eugam A. Mueller STATE WATER SURVEY DIVISION A. M. BUSWELL, Chief URBANA. ILLINOIS (Printed by authority of State of Illinois} REPORT OF INVESTIGATION NO. 28 1955 STATE OF ILLINOIS WILLIAM G. STRATTON, Governor DEPARTMENT OF REGISTRATION AND EDUCATION VERA M. BINKS, Director RADAR BACK-SCATTERING FROM NON-SPHERICAL SCATTERERS PART 1 CROSS-SECTIONS OF CONDUCTING PROLATES AND SPHEROIDAL FUNCTIONS PART 11 CROSS-SECTIONS FROM NON-SPHERICAL RAINDROPS BY Prem N. Mathur and Eugene A. Mueller STATE WATER SURVEY DIVISION A. M. BUSWELL, Chief URBANA, ILLINOIS (Printed by authority of State of Illinois) Definitions of Terms Part I semi minor axis of spheroid semi major axis of spheroid wavelength of incident field = a measure of size of particle prolate spheroidal coordinates = eccentricity of ellipse = angular spheroidal functions = Legendse polynomials = expansion coefficients = radial spheroidal functions = spherical Bessel functions = electric field vector = magnetic field vector = back scattering cross section = geometric back scattering cross section Part II = semi minor axis of spheroid = semi major axis of spheroid = Poynting vector = measure of size of spheroid = wavelength of the radiation = back scattering -

John Ellipsoid 5.1 John Ellipsoid
CSE 599: Interplay between Convex Optimization and Geometry Winter 2018 Lecture 5: John Ellipsoid Lecturer: Yin Tat Lee Disclaimer: Please tell me any mistake you noticed. The algorithm at the end is unpublished. Feel free to contact me for collaboration. 5.1 John Ellipsoid In the last lecture, we discussed that any convex set is very close to anp ellipsoid in probabilistic sense. More precisely, after renormalization by covariance matrix, we have kxk2 = n ± Θ(1) with high probability. In this lecture, we will talk about how convex set is close to an ellipsoid in a strict sense. If the convex set is isotropic, it is close to a sphere as follows: Theorem 5.1.1. Let K be a convex body in Rn in isotropic position. Then, rn + 1 B ⊆ K ⊆ pn(n + 1)B : n n n Roughly speaking, this says that any convex set can be approximated by an ellipsoid by a n factor. This result has a lot of applications. Although the bound is tight, making a body isotropic is pretty time- consuming. In fact, making a body isotropic is the current bottleneck for obtaining faster algorithm for sampling in convex sets. Currently, it can only be done in O∗(n4) membership oracle plus O∗(n5) total time. Problem 5.1.2. Find a faster algorithm to approximate the covariance matrix of a convex set. In this lecture, we consider another popular position of a convex set called John position and its correspond- ing ellipsoid is called John ellipsoid. Definition 5.1.3. Given a convex set K. -
Geodesy Methods Over Time
Geodesy methods over time GISC3325 - Lecture 4 Astronomic Latitude/Longitude • Given knowledge of the positions of an astronomic body e.g. Sun or Polaris and our time we can determine our location in terms of astronomic latitude and longitude. US Meridian Triangulation This map shows the first project undertaken by the founding Superintendent of the Survey of the Coast Ferdinand Hassler. Triangulation • Method of indirect measurement. • Angles measured at all nodes. • Scaled provided by one or more precisely measured base lines. • First attributed to Gemma Frisius in the 16th century in the Netherlands. Early surveying instruments Left is a Quadrant for angle measurements, below is how baseline lengths were measured. A non-spherical Earth • Willebrod Snell van Royen (Snellius) did the first triangulation project for the purpose of determining the radius of the earth from measurement of a meridian arc. • Snellius was also credited with the law of refraction and incidence in optics. • He also devised the solution of the resection problem. At point P observations are made to known points A, B and C. We solve for P. Jean Picard’s Meridian Arc • Measured meridian arc through Paris between Malvoisine and Amiens using triangulation network. • First to use a telescope with cross hairs as part of the quadrant. • Value obtained used by Newton to verify his law of gravitation. Ellipsoid Earth Model • On an expedition J.D. Cassini discovered that a one-second pendulum regulated at Paris needed to be shortened to regain a one-second oscillation. • Pendulum measurements are effected by gravity! Newton • Newton used measurements of Picard and Halley and the laws of gravitation to postulate a rotational ellipsoid as the equilibrium figure for a homogeneous, fluid, rotating Earth. -
The Global Positioning System the Global Positioning System
The Global Positioning System The Global Positioning System 1. System Overview 2. Biases and Errors 3. Signal Structure and Observables 4. Absolute v. Relative Positioning 5. GPS Field Procedures 6. Ellipsoids, Datums and Coordinate Systems 7. Mission Planning I. System Overview ! GPS is a passive navigation and positioning system available worldwide 24 hours a day in all weather conditions developed and maintained by the Department of Defense ! The Global Positioning System consists of three segments: ! Space Segment ! Control Segment ! User Segment Space Segment Space Segment ! The current GPS constellation consists of 29 Block II/IIA/IIR/IIR-M satellites. The first Block II satellite was launched in February 1989. Control Segment User Segment How it Works II. Biases and Errors Biases GPS Error Sources • Satellite Dependent ? – Orbit representation ? Satellite Orbit Error Satellite Clock Error including 12 biases ? 9 3 Selective Availability 6 – Satellite clock model biases Ionospheric refraction • Station Dependent L2 L1 – Receiver clock biases – Station Coordinates Tropospheric Delay • Observation Multi- pathing Dependent – Ionospheric delay 12 9 3 – Tropospheric delay Receiver Clock Error 6 1000 – Carrier phase ambiguity Satellite Biases ! The satellite is not where the GPS broadcast message says it is. ! The satellite clocks are not perfectly synchronized with GPS time. Station Biases ! Receiver clock time differs from satellite clock time. ! Uncertainties in the coordinates of the station. ! Time transfer and orbital tracking. Observation Dependent Biases ! Those associated with signal propagation Errors ! Residual Biases ! Cycle Slips ! Multipath ! Antenna Phase Center Movement ! Random Observation Error Errors ! In addition to biases factors effecting position and/or time determined by GPS is dependant upon: ! The geometric strength of the satellite configuration being observed (DOP). -

J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This Course Is an Introduction to the Geometry of Smooth Curves and Surf
J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This course is an introduction to the geometry of smooth if the velocity never vanishes). Then the speed is a (smooth) curves and surfaces in Euclidean space Rn (in particular for positive function of t. (The cusped curve β above is not regular n = 2; 3). The local shape of a curve or surface is described at t = 0; the other examples given are regular.) in terms of its curvatures. Many of the big theorems in the DE The lengthR [ : Länge] of a smooth curve α is defined as subject – such as the Gauss–Bonnet theorem, a highlight at the j j len(α) = I α˙(t) dt. (For a closed curve, of course, we should end of the semester – deal with integrals of curvature. Some integrate from 0 to T instead of over the whole real line.) For of these integrals are topological constants, unchanged under any subinterval [a; b] ⊂ I, we see that deformation of the original curve or surface. Z b Z b We will usually describe particular curves and surfaces jα˙(t)j dt ≥ α˙(t) dt = α(b) − α(a) : locally via parametrizations, rather than, say, as level sets. a a Whereas in algebraic geometry, the unit circle is typically be described as the level set x2 + y2 = 1, we might instead This simply means that the length of any curve is at least the parametrize it as (cos t; sin t). straight-line distance between its endpoints. Of course, by Euclidean space [DE: euklidischer Raum] The length of an arbitrary curve can be defined (following n we mean the vector space R 3 x = (x1;:::; xn), equipped Jordan) as its total variation: with with the standard inner product or scalar product [DE: P Xn Skalarproduktp ] ha; bi = a · b := aibi and its associated norm len(α):= TV(α):= sup α(ti) − α(ti−1) : jaj := ha; ai. -

Introduction to Aberrations OPTI 518 Lecture 13
Introduction to aberrations OPTI 518 Lecture 13 Prof. Jose Sasian OPTI 518 Topics • Aspheric surfaces • Stop shifting • Field curve concept Prof. Jose Sasian OPTI 518 Aspheric Surfaces • Meaning not spherical • Conic surfaces: Sphere, prolate ellipsoid, hyperboloid, paraboloid, oblate ellipsoid or spheroid • Cartesian Ovals • Polynomial surfaces • Infinite possibilities for an aspheric surface • Ray tracing for quadric surfaces uses closed formulas; for other surfaces iterative algorithms are used Prof. Jose Sasian OPTI 518 Aspheric surfaces The concept of the sag of a surface 2 cS 4 6 8 10 ZS ASASASAS4 6 8 10 ... 1 1 K ( c2 1 ) 2 S Sxy222 K 2 K is the conic constant K=0, sphere K=-1, parabola C is 1/r where r is the radius of curvature; K is the K<-1, hyperola conic constant (the eccentricity squared); -1<K<0, prolate ellipsoid A’s are aspheric coefficients K>0, oblate ellipsoid Prof. Jose Sasian OPTI 518 Conic surfaces focal properties • Focal points for Ellipsoid case mirrors Hyperboloid case Oblate ellipsoid • Focal points of lenses K n2 Hecht-Zajac Optics Prof. Jose Sasian OPTI 518 Refraction at a spherical surface Aspheric surface description 2 cS 4 6 8 10 ZS ASASASAS4 6 8 10 ... 1 1 K ( c2 1 ) 2 S 1122 2222 22 y x Aicrasphe y 1 x 4 K y Zx 28rr Prof. Jose Sasian OTI 518P Cartesian Ovals ln l'n' Cte . Prof. Jose Sasian OPTI 518 Aspheric cap Aspheric surface The aspheric surface can be thought of as comprising a base sphere and an aspheric cap Cap Spherical base surface Prof. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

Models for Earth and Maps
Earth Models and Maps James R. Clynch, Naval Postgraduate School, 2002 I. Earth Models Maps are just a model of the world, or a small part of it. This is true if the model is a globe of the entire world, a paper chart of a harbor or a digital database of streets in San Francisco. A model of the earth is needed to convert measurements made on the curved earth to maps or databases. Each model has advantages and disadvantages. Each is usually in error at some level of accuracy. Some of these error are due to the nature of the model, not the measurements used to make the model. Three are three common models of the earth, the spherical (or globe) model, the ellipsoidal model, and the real earth model. The spherical model is the form encountered in elementary discussions. It is quite good for some approximations. The world is approximately a sphere. The sphere is the shape that minimizes the potential energy of the gravitational attraction of all the little mass elements for each other. The direction of gravity is toward the center of the earth. This is how we define down. It is the direction that a string takes when a weight is at one end - that is a plumb bob. A spirit level will define the horizontal which is perpendicular to up-down. The ellipsoidal model is a better representation of the earth because the earth rotates. This generates other forces on the mass elements and distorts the shape. The minimum energy form is now an ellipse rotated about the polar axis. -

GPS and the Search for Axions
GPS and the Search for Axions A. Nicolaidis1 Theoretical Physics Department Aristotle University of Thessaloniki, Greece Abstract: GPS, an excellent tool for geodesy, may serve also particle physics. In the presence of Earth’s magnetic field, a GPS photon may be transformed into an axion. The proposed experimental setup involves the transmission of a GPS signal from a satellite to another satellite, both in low orbit around the Earth. To increase the accuracy of the experiment, we evaluate the influence of Earth’s gravitational field on the whole quantum phenomenon. There is a significant advantage in our proposal. While the geomagnetic field B is low, the magnetized length L is very large, resulting into a scale (BL)2 orders of magnitude higher than existing or proposed reaches. The transformation of the GPS photons into axion particles will result in a dimming of the photons and even to a “light shining through the Earth” phenomenon. 1 Email: [email protected] 1 Introduction Quantum Chromodynamics (QCD) describes the strong interactions among quarks and gluons and offers definite predictions at the high energy-perturbative domain. At low energies the non-linear nature of the theory introduces a non-trivial vacuum which violates the CP symmetry. The CP violating term is parameterized by θ and experimental bounds indicate that θ ≤ 10–10. The smallness of θ is known as the strong CP problem. An elegant solution has been offered by Peccei – Quinn [1]. A global U(1)PQ symmetry is introduced, the spontaneous breaking of which provides the cancellation of the θ – term. As a byproduct, we obtain the axion field, the Nambu-Goldstone boson of the broken U(1)PQ symmetry. -

World Geodetic System 1984
World Geodetic System 1984 Responsible Organization: National Geospatial-Intelligence Agency Abbreviated Frame Name: WGS 84 Associated TRS: WGS 84 Coverage of Frame: Global Type of Frame: 3-Dimensional Last Version: WGS 84 (G1674) Reference Epoch: 2005.0 Brief Description: WGS 84 is an Earth-centered, Earth-fixed terrestrial reference system and geodetic datum. WGS 84 is based on a consistent set of constants and model parameters that describe the Earth's size, shape, and gravity and geomagnetic fields. WGS 84 is the standard U.S. Department of Defense definition of a global reference system for geospatial information and is the reference system for the Global Positioning System (GPS). It is compatible with the International Terrestrial Reference System (ITRS). Definition of Frame • Origin: Earth’s center of mass being defined for the whole Earth including oceans and atmosphere • Axes: o Z-Axis = The direction of the IERS Reference Pole (IRP). This direction corresponds to the direction of the BIH Conventional Terrestrial Pole (CTP) (epoch 1984.0) with an uncertainty of 0.005″ o X-Axis = Intersection of the IERS Reference Meridian (IRM) and the plane passing through the origin and normal to the Z-axis. The IRM is coincident with the BIH Zero Meridian (epoch 1984.0) with an uncertainty of 0.005″ o Y-Axis = Completes a right-handed, Earth-Centered Earth-Fixed (ECEF) orthogonal coordinate system • Scale: Its scale is that of the local Earth frame, in the meaning of a relativistic theory of gravitation. Aligns with ITRS • Orientation: Given by the Bureau International de l’Heure (BIH) orientation of 1984.0 • Time Evolution: Its time evolution in orientation will create no residual global rotation with regards to the crust Coordinate System: Cartesian Coordinates (X, Y, Z). -
Design Data 21
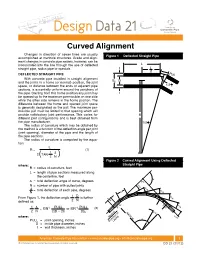
Design Data 21 Curved Alignment Changes in direction of sewer lines are usually Figure 1 Deflected Straight Pipe accomplished at manhole structures. Grade and align- Figure 1 Deflected Straight Pipe ment changes in concrete pipe sewers, however, can be incorporated into the line through the use of deflected L straight pipe, radius pipe or specials. t L 2 DEFLECTED STRAIGHT PIPE Pull With concrete pipe installed in straight alignment Bc D and the joints in a home (or normal) position, the joint ∆ space, or distance between the ends of adjacent pipe 1/2 N sections, is essentially uniform around the periphery of the pipe. Starting from this home position any joint may t be opened up to the maximum permissible on one side while the other side remains in the home position. The difference between the home and opened joint space is generally designated as the pull. The maximum per- missible pull must be limited to that opening which will provide satisfactory joint performance. This varies for R different joint configurations and is best obtained from the pipe manufacturer. ∆ 1/2 N The radius of curvature which may be obtained by this method is a function of the deflection angle per joint (joint opening), diameter of the pipe and the length of the pipe sections. The radius of curvature is computed by the equa- tion: L R = (1) 1 ∆ 2 TAN ( 2 N ) Figure 2 Curved Alignment Using Deflected Figure 2 Curved Alignment Using Deflected where: Straight Pipe R = radius of curvature, feet Straight Pipe L = length of pipe sections measured along the centerline, feet ∆ ∆ = total deflection angle of curve, degrees P.I.