Denoising Convolutional Autoencoders for Noisy Speech Recognition
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Deblured Gaussian Blurred Images
JOURNAL OF COMPUTING, VOLUME 2, ISSUE 4, APRIL 2010, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/ 33 Deblured Gaussian Blurred Images Mr. Salem Saleh Al-amri1, Dr. N.V. Kalyankar2 and Dr. Khamitkar S.D 3 Abstract—This paper attempts to undertake the study of Restored Gaussian Blurred Images. by using four types of techniques of deblurring image as Wiener filter, Regularized filter ,Lucy Richardson deconvlutin algorithm and Blind deconvlution algorithm with an information of the Point Spread Function (PSF) corrupted blurred image with Different values of Size and Alfa and then corrupted by Gaussian noise. The same is applied to the remote sensing image and they are compared with one another, So as to choose the base technique for restored or deblurring image.This paper also attempts to undertake the study of restored Gaussian blurred image with no any information about the Point Spread Function (PSF) by using same four techniques after execute the guess of the PSF, the number of iterations and the weight threshold of it. To choose the base guesses for restored or deblurring image of this techniques. Index Terms—Blur/Types of Blur/PSF; Deblurring/Deblurring Methods. —————————— —————————— 1 INTRODUCTION he restoration image is very important process in the image entire image. Tprocessing to restor the image by using the image processing This type of blurring can be distribution in horizontal and vertical techniques to easily understand this image without any artifacts direction and can be circular averaging by radius -

A Comparative Study of Different Noise Filtering Techniques in Digital Images
International Journal of Engineering Research and General Science Volume 3, Issue 5, September-October, 2015 ISSN 2091-2730 A COMPARATIVE STUDY OF DIFFERENT NOISE FILTERING TECHNIQUES IN DIGITAL IMAGES Sanjib Das1, Jonti Saikia2, Soumita Das3 and Nural Goni4 1Deptt. of IT & Mathematics,ICFAI University Nagaland, Dimapur, 797112, India, [email protected] 2Service Engineer, Indian export & import office, Shillong- 793003, Meghalaya, India, [email protected] 3Department of IT, School of Technology, NEHU, Shillong-22, Meghalaya, India, [email protected] 4Department of IT, School of Technology, NEHU, Shillong-22, Meghalaya, India, [email protected] Abstract: Although various solutions are available for de-noising them, a detail study of the research is required in order to design a filter which will fulfil the desire aspects along with handling most of the image filtering issues. In this paper we want to present some of the most commonly used noise filtering techniques namely: Median filter, Gaussian filter, Kuan filter, Morphological filter, Homomorphic Filter, Bilateral Filter and wavelet filter. Median filter is used for reducing the amount of intensity variation from one pixel to another pixel. Gaussian filter is a smoothing filter in the 2D convolution operation that is used to remove noise and blur from image. Kuan filtering technique transforms multiplicative noise model into additive noise model. Morphological filter is defined as increasing idempotent operators and their laws of composition are proved. Homomorphic Filter normalizes the brightness across an image and increases contrast. Bilateral Filter is a non-linear edge preserving and noise reducing smoothing filter for images. Wavelet transform can be applied to image de-noising and it has been extremely successful. -
AN279: Estimating Period Jitter from Phase Noise
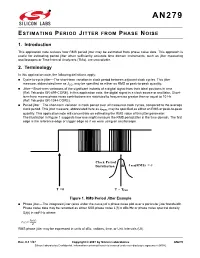
AN279 ESTIMATING PERIOD JITTER FROM PHASE NOISE 1. Introduction This application note reviews how RMS period jitter may be estimated from phase noise data. This approach is useful for estimating period jitter when sufficiently accurate time domain instruments, such as jitter measuring oscilloscopes or Time Interval Analyzers (TIAs), are unavailable. 2. Terminology In this application note, the following definitions apply: Cycle-to-cycle jitter—The short-term variation in clock period between adjacent clock cycles. This jitter measure, abbreviated here as JCC, may be specified as either an RMS or peak-to-peak quantity. Jitter—Short-term variations of the significant instants of a digital signal from their ideal positions in time (Ref: Telcordia GR-499-CORE). In this application note, the digital signal is a clock source or oscillator. Short- term here means phase noise contributions are restricted to frequencies greater than or equal to 10 Hz (Ref: Telcordia GR-1244-CORE). Period jitter—The short-term variation in clock period over all measured clock cycles, compared to the average clock period. This jitter measure, abbreviated here as JPER, may be specified as either an RMS or peak-to-peak quantity. This application note will concentrate on estimating the RMS value of this jitter parameter. The illustration in Figure 1 suggests how one might measure the RMS period jitter in the time domain. The first edge is the reference edge or trigger edge as if we were using an oscilloscope. Clock Period Distribution J PER(RMS) = T = 0 T = TPER Figure 1. RMS Period Jitter Example Phase jitter—The integrated jitter (area under the curve) of a phase noise plot over a particular jitter bandwidth. -

Signal-To-Noise Ratio and Dynamic Range Definitions
Signal-to-noise ratio and dynamic range definitions The Signal-to-Noise Ratio (SNR) and Dynamic Range (DR) are two common parameters used to specify the electrical performance of a spectrometer. This technical note will describe how they are defined and how to measure and calculate them. Figure 1: Definitions of SNR and SR. The signal out of the spectrometer is a digital signal between 0 and 2N-1, where N is the number of bits in the Analogue-to-Digital (A/D) converter on the electronics. Typical numbers for N range from 10 to 16 leading to maximum signal level between 1,023 and 65,535 counts. The Noise is the stochastic variation of the signal around a mean value. In Figure 1 we have shown a spectrum with a single peak in wavelength and time. As indicated on the figure the peak signal level will fluctuate a small amount around the mean value due to the noise of the electronics. Noise is measured by the Root-Mean-Squared (RMS) value of the fluctuations over time. The SNR is defined as the average over time of the peak signal divided by the RMS noise of the peak signal over the same time. In order to get an accurate result for the SNR it is generally required to measure over 25 -50 time samples of the spectrum. It is very important that your input to the spectrometer is constant during SNR measurements. Otherwise, you will be measuring other things like drift of you lamp power or time dependent signal levels from your sample. -

A Simple Second Derivative Based Blur Estimation Technique Thesis
A Simple Second Derivative Based Blur Estimation Technique Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio State University By Gourab Ghosh Roy, B.E. Graduate Program in Computer Science & Engineering The Ohio State University 2013 Thesis Committee: Brian Kulis, Advisor Mikhail Belkin Copyright by Gourab Ghosh Roy 2013 Abstract Blur detection is a very important problem in image processing. Different sources can lead to blur in images, and much work has been done to have automated image quality assessment techniques consistent with human rating. In this work a no-reference second derivative based image metric for blur detection and estimation has been proposed. This method works by evaluating the magnitude of the second derivative at the edge points in an image, and calculating the proportion of edge points where the magnitude is greater than a certain threshold. Lower values of this proportion or the metric denote increased levels of blur in the image. Experiments show that this method can successfully differentiate between images with no blur and varying degrees of blur. Comparison with some other state-of-the-art quality assessment techniques on a standard dataset of Gaussian blur images shows that the proposed method gives moderately high performance values in terms of correspondence with human subjective scores. Coupled with the method’s primary aspect of simplicity and subsequent ease of implementation, this makes it a probable choice for mobile applications. ii Acknowledgements This work was motivated by involvement in the personal analytics research group with Dr. -

Histopathology Learning Dataset Augmentation: a Hybrid Approach
Proceedings of Machine Learning Research { Under Review:1{9, 2021 Full Paper { MIDL 2021 submission HISTOPATHOLOGY LEARNING DATASET AUGMENTATION: A HYBRID APPROACH Ramzi HAMDI1 [email protected] Cl´ement BOUVIER1 [email protected] Thierry DELZESCAUX2 [email protected] C´edricCLOUCHOUX1 [email protected] 1 WITSEE, Neoxia, Paris, France 2 CEA-CNRS-UMR 9199, LMN, MIRCen, Univ. Paris-Saclay, Fontenay-aux-Roses, France Editors: Under Review for MIDL 2021 Abstract In histopathology, staining quantification is a mandatory step to unveil and characterize disease progression and assess drug efficiency in preclinical and clinical settings. Super- vised Machine Learning (SML) algorithms allow the automation of such tasks but rely on large learning datasets, which are not easily available for pre-clinical settings. Such databases can be extended using traditional Data Augmentation methods, although gen- erated images diversity is heavily dependent on hyperparameter tuning. Generative Ad- versarial Networks (GAN) represent a potential efficient way to synthesize images with a parameter-independent range of staining distribution. Unfortunately, generalization of such approaches is jeopardized by the low quantity of publicly available datasets. To leverage this issue, we propose a hybrid approach, mixing traditional data augmentation and GAN to produce partially or completely synthetic learning datasets for segmentation application. The augmented datasets are validated by a two-fold cross-validation analysis using U-Net as a SML method and F-Score as a quantitative criterion. Keywords: Generative Adversarial Networks, Histology, Machine Learning, Whole Slide Imaging 1. Introduction Histology is widely used to detect biological objects with specific staining such as protein deposits, blood vessels or cells. -

Image Denoising by Autoencoder: Learning Core Representations
Image Denoising by AutoEncoder: Learning Core Representations Zhenyu Zhao College of Engineering and Computer Science, The Australian National University, Australia, [email protected] Abstract. In this paper, we implement an image denoising method which can be generally used in all kinds of noisy images. We achieve denoising process by adding Gaussian noise to raw images and then feed them into AutoEncoder to learn its core representations(raw images itself or high-level representations).We use pre- trained classifier to test the quality of the representations with the classification accuracy. Our result shows that in task-specific classification neuron networks, the performance of the network with noisy input images is far below the preprocessing images that using denoising AutoEncoder. In the meanwhile, our experiments also show that the preprocessed images can achieve compatible result with the noiseless input images. Keywords: Image Denoising, Image Representations, Neuron Networks, Deep Learning, AutoEncoder. 1 Introduction 1.1 Image Denoising Image is the object that stores and reflects visual perception. Images are also important information carriers today. Acquisition channel and artificial editing are the two main ways that corrupt observed images. The goal of image restoration techniques [1] is to restore the original image from a noisy observation of it. Image denoising is common image restoration problems that are useful by to many industrial and scientific applications. Image denoising prob- lems arise when an image is corrupted by additive white Gaussian noise which is common result of many acquisition channels. The white Gaussian noise can be harmful to many image applications. Hence, it is of great importance to remove Gaussian noise from images. -

Anisotropic Diffusion in Image Processing
Anisotropic diffusion in image processing Tomi Sariola Advisor: Petri Ola September 16, 2019 Abstract Sometimes digital images may suffer from considerable noisiness. Of course, we would like to obtain the original noiseless image. However, this may not be even possible. In this thesis we utilize diffusion equations, particularly anisotropic diffusion, to reduce the noise level of the image. Applying these kinds of methods is a trade-off between retaining information and the noise level. Diffusion equations may reduce the noise level, but they also may blur the edges and thus information is lost. We discuss the mathematics and theoretical results behind the diffusion equations. We start with continuous equations and build towards discrete equations as digital images are fully discrete. The main focus is on iterative method, that is, we diffuse the image step by step. As it occurs, we need certain assumptions for these equations to produce good results, one of which is a timestep restriction and the other is a correct choice of a diffusivity function. We construct an anisotropic diffusion algorithm to denoise images and compare it to other diffusion equations. We discuss the edge-enhancing property, the noise removal properties and the convergence of the anisotropic diffusion. Results on test images show that the anisotropic diffusion is capable of reducing the noise level of the image while retaining the edges of image and as mentioned, anisotropic diffusion may even sharpen the edges of the image. Contents 1 Diffusion filtering 3 1.1 Physical background on diffusion . 3 1.2 Diffusion filtering with heat equation . 4 1.3 Non-linear models . -

Active Noise Control Over Space: a Subspace Method for Performance Analysis
applied sciences Article Active Noise Control over Space: A Subspace Method for Performance Analysis Jihui Zhang 1,* , Thushara D. Abhayapala 1 , Wen Zhang 1,2 and Prasanga N. Samarasinghe 1 1 Audio & Acoustic Signal Processing Group, College of Engineering and Computer Science, Australian National University, Canberra 2601, Australia; [email protected] (T.D.A.); [email protected] (W.Z.); [email protected] (P.N.S.) 2 Center of Intelligent Acoustics and Immersive Communications, School of Marine Science and Technology, Northwestern Polytechnical University, Xi0an 710072, China * Correspondence: [email protected] Received: 28 February 2019; Accepted: 20 March 2019; Published: 25 March 2019 Abstract: In this paper, we investigate the maximum active noise control performance over a three-dimensional (3-D) spatial space, for a given set of secondary sources in a particular environment. We first formulate the spatial active noise control (ANC) problem in a 3-D room. Then we discuss a wave-domain least squares method by matching the secondary noise field to the primary noise field in the wave domain. Furthermore, we extract the subspace from wave-domain coefficients of the secondary paths and propose a subspace method by matching the secondary noise field to the projection of primary noise field in the subspace. Simulation results demonstrate the effectiveness of the proposed algorithms by comparison between the wave-domain least squares method and the subspace method, more specifically the energy of the loudspeaker driving signals, noise reduction inside the region, and residual noise field outside the region. We also investigate the ANC performance under different loudspeaker configurations and noise source positions. -

22Nd International Congress on Acoustics ICA 2016
Page intentionaly left blank 22nd International Congress on Acoustics ICA 2016 PROCEEDINGS Editors: Federico Miyara Ernesto Accolti Vivian Pasch Nilda Vechiatti X Congreso Iberoamericano de Acústica XIV Congreso Argentino de Acústica XXVI Encontro da Sociedade Brasileira de Acústica 22nd International Congress on Acoustics ICA 2016 : Proceedings / Federico Miyara ... [et al.] ; compilado por Federico Miyara ; Ernesto Accolti. - 1a ed . - Gonnet : Asociación de Acústicos Argentinos, 2016. Libro digital, PDF Archivo Digital: descarga y online ISBN 978-987-24713-6-1 1. Acústica. 2. Acústica Arquitectónica. 3. Electroacústica. I. Miyara, Federico II. Miyara, Federico, comp. III. Accolti, Ernesto, comp. CDD 690.22 ISBN 978-987-24713-6-1 © Asociación de Acústicos Argentinos Hecho el depósito que marca la ley 11.723 Disclaimer: The material, information, results, opinions, and/or views in this publication, as well as the claim for authorship and originality, are the sole responsibility of the respective author(s) of each paper, not the International Commission for Acoustics, the Federación Iberoamaricana de Acústica, the Asociación de Acústicos Argentinos or any of their employees, members, authorities, or editors. Except for the cases in which it is expressly stated, the papers have not been subject to peer review. The editors have attempted to accomplish a uniform presentation for all papers and the authors have been given the opportunity to correct detected formatting non-compliances Hecho en Argentina Made in Argentina Asociación de Acústicos Argentinos, AdAA Camino Centenario y 5006, Gonnet, Buenos Aires, Argentina http://www.adaa.org.ar Proceedings of the 22th International Congress on Acoustics ICA 2016 5-9 September 2016 Catholic University of Argentina, Buenos Aires, Argentina ICA 2016 has been organised by the Ibero-american Federation of Acoustics (FIA) and the Argentinian Acousticians Association (AdAA) on behalf of the International Commission for Acoustics. -

Noise Reduction Through Active Noise Control Using Stereophonic Sound for Increasing Quite Zone
Noise reduction through active noise control using stereophonic sound for increasing quite zone Dongki Min1; Junjong Kim2; Sangwon Nam3; Junhong Park4 1,2,3,4 Hanyang University, Korea ABSTRACT The low frequency impact noise generated during machine operation is difficult to control by conventional active noise control. The Active Noise Control (ANC) is a destructive interference technic of noise source and control sound by generating anti-phase control sound. Its efficiency is limited to small space near the error microphones. At different locations, the noise level may increase due to control sounds. In this study, the ANC method using stereophonic sound was investigated to reduce interior low frequency noise and increase the quite zone. The Distance Based Amplitude Panning (DBAP) algorithm based on the distance between the virtual sound source and the speaker was used to create a virtual sound source by adjusting the volume proportions of multi speakers respectively. The 3-Dimensional sound ANC system was able to change the position of virtual control source using DBAP algorithm. The quiet zone was formed using fixed multi speaker system for various locations of noise sources. Keywords: Active noise control, stereophonic sound I-INCE Classification of Subjects Number(s): 38.2 1. INTRODUCTION The noise reduction is a main issue according to improvement of living condition. There are passive and active control methods for noise reduction. The passive noise control uses sound absorption material which has efficiency about high frequency. The Active Noise Control (ANC) which is the method for generating anti phase control sound is able to reduce low frequency. -

AN-839 RMS Phase Jitter
RMS Phase Jitter AN-839 APPLICATION NOTE Introduction In order to discuss RMS Phase Jitter, some basics phase noise theory must be understood. Phase noise is often considered an important measurement of spectral purity which is the inherent stability of a timing signal. Phase noise is the frequency domain representation of random fluctuations in the phase of a waveform caused by time domain instabilities called jitter. An ideal sinusoidal oscillator, with perfect spectral purity, has a single line in the frequency spectrum. Such perfect spectral purity is not achievable in a practical oscillator where there are phase and frequency fluctuations. Phase noise is a way of describing the phase and frequency fluctuation or jitter of a timing signal in the frequency domain as compared to a perfect reference signal. Generating Phase Noise and Frequency Spectrum Plots Phase noise data is typically generated from a frequency spectrum plot which can represent a time domain signal in the frequency domain. A frequency spectrum plot is generated via a Fourier transform of the signal, and the resulting values are plotted with power versus frequency. This is normally done using a spectrum analyzer. A frequency spectrum plot is used to define the spectral purity of a signal. The noise power in a band at a specific offset (FO) from the carrier frequency (FC) compared to the power of the carrier frequency is called the dBc Phase Noise. Power Level of a 1Hz band at an offset (F ) dBc Phase Noise = O Power Level of the carrier Frequency (FC) A Phase Noise plot is generated using data from the frequency spectrum plot.