High-Quality Computational Imaging Through Simple Lenses
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 3 (Aberrations)
Chapter 3 Aberrations 3.1 Introduction In Chap. 2 we discussed the image-forming characteristics of optical systems, but we limited our consideration to an infinitesimal thread- like region about the optical axis called the paraxial region. In this chapter we will consider, in general terms, the behavior of lenses with finite apertures and fields of view. It has been pointed out that well- corrected optical systems behave nearly according to the rules of paraxial imagery given in Chap. 2. This is another way of stating that a lens without aberrations forms an image of the size and in the loca- tion given by the equations for the paraxial or first-order region. We shall measure the aberrations by the amount by which rays miss the paraxial image point. It can be seen that aberrations may be determined by calculating the location of the paraxial image of an object point and then tracing a large number of rays (by the exact trigonometrical ray-tracing equa- tions of Chap. 10) to determine the amounts by which the rays depart from the paraxial image point. Stated this baldly, the mathematical determination of the aberrations of a lens which covered any reason- able field at a real aperture would seem a formidable task, involving an almost infinite amount of labor. However, by classifying the various types of image faults and by understanding the behavior of each type, the work of determining the aberrations of a lens system can be sim- plified greatly, since only a few rays need be traced to evaluate each aberration; thus the problem assumes more manageable proportions. -
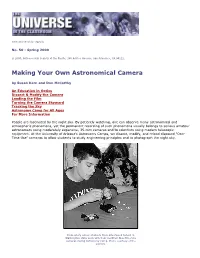
Making Your Own Astronomical Camera by Susan Kern and Don Mccarthy
www.astrosociety.org/uitc No. 50 - Spring 2000 © 2000, Astronomical Society of the Pacific, 390 Ashton Avenue, San Francisco, CA 94112. Making Your Own Astronomical Camera by Susan Kern and Don McCarthy An Education in Optics Dissect & Modify the Camera Loading the Film Turning the Camera Skyward Tracking the Sky Astronomy Camp for All Ages For More Information People are fascinated by the night sky. By patiently watching, one can observe many astronomical and atmospheric phenomena, yet the permanent recording of such phenomena usually belongs to serious amateur astronomers using moderately expensive, 35-mm cameras and to scientists using modern telescopic equipment. At the University of Arizona's Astronomy Camps, we dissect, modify, and reload disposed "One- Time Use" cameras to allow students to study engineering principles and to photograph the night sky. Elementary school students from Silverwood School in Washington state work with their modified One-Time Use cameras during Astronomy Camp. Photo courtesy of the authors. Today's disposable cameras are a marvel of technology, wonderfully suited to a variety of educational activities. Discarded plastic cameras are free from camera stores. Students from junior high through graduate school can benefit from analyzing the cameras' optics, mechanisms, electronics, light sources, manufacturing techniques, and economics. Some of these educational features were recently described by Gene Byrd and Mark Graham in their article in the Physics Teacher, "Camera and Telescope Free-for-All!" (1999, vol. 37, p. 547). Here we elaborate on the cameras' optical properties and show how to modify and reload one for astrophotography. An Education in Optics The "One-Time Use" cameras contain at least six interesting optical components. -

Glossary of Lens Terms
GLOSSARY OF LENS TERMS The following three pages briefly define the optical terms used most frequently in the preceding Lens Theory Section, and throughout this catalog. These definitions are limited to the context in which the terms are used in this catalog. Aberration: A defect in the image forming capability of a Convex: A solid curved surface similar to the outside lens or optical system. surface of a sphere. Achromatic: Free of aberrations relating to color or Crown Glass: A type of optical glass with relatively low Lenses wavelength. refractive index and dispersion. Airy Pattern: The diffraction pattern formed by a perfect Diffraction: Deviation of the direction of propagation of a lens with a circular aperture, imaging a point source. The radiation, determined by the wave nature of radiation, and diameter of the pattern to the first minimum = 2.44 λ f/D occurring when the radiation passes the edge of an Where: obstacle. λ = Wavelength Diffraction Limited Lens: A lens with negligible residual f = Lens focal length aberrations. D = Aperture diameter Dispersion: (1) The variation in the refractive index of a This central part of the pattern is sometimes called the Airy medium as a function of wavelength. (2) The property of an Filters Disc. optical system which causes the separation of the Annulus: The figure bounded by and containing the area monochromatic components of radiation. between two concentric circles. Distortion: An off-axis lens aberration that changes the Aperture: An opening in an optical system that limits the geometric shape of the image due to a variation of focal amount of light passing through the system. -
Zemax, LLC Getting Started with Opticstudio 15
Zemax, LLC Getting Started With OpticStudio 15 May 2015 www.zemax.com [email protected] [email protected] Contents Contents 3 Getting Started With OpticStudio™ 7 Congratulations on your purchase of Zemax OpticStudio! ....................................... 7 Important notice ......................................................................................................................... 8 Installation .................................................................................................................................... 9 License Codes ........................................................................................................................... 10 Network Keys and Clients .................................................................................................... 11 Troubleshooting ...................................................................................................................... 11 Customizing Your Installation ............................................................................................ 12 Navigating the OpticStudio Interface 13 System Explorer ....................................................................................................................... 16 File Tab ........................................................................................................................................ 17 Setup Tab ................................................................................................................................... 18 Analyze -

Topic 3: Operation of Simple Lens
V N I E R U S E I T H Y Modern Optics T O H F G E R D I N B U Topic 3: Operation of Simple Lens Aim: Covers imaging of simple lens using Fresnel Diffraction, resolu- tion limits and basics of aberrations theory. Contents: 1. Phase and Pupil Functions of a lens 2. Image of Axial Point 3. Example of Round Lens 4. Diffraction limit of lens 5. Defocus 6. The Strehl Limit 7. Other Aberrations PTIC D O S G IE R L O P U P P A D E S C P I A S Properties of a Lens -1- Autumn Term R Y TM H ENT of P V N I E R U S E I T H Y Modern Optics T O H F G E R D I N B U Ray Model Simple Ray Optics gives f Image Object u v Imaging properties of 1 1 1 + = u v f The focal length is given by 1 1 1 = (n − 1) + f R1 R2 For Infinite object Phase Shift Ray Optics gives Delta Fn f Lens introduces a path length difference, or PHASE SHIFT. PTIC D O S G IE R L O P U P P A D E S C P I A S Properties of a Lens -2- Autumn Term R Y TM H ENT of P V N I E R U S E I T H Y Modern Optics T O H F G E R D I N B U Phase Function of a Lens δ1 δ2 h R2 R1 n P0 P ∆ 1 With NO lens, Phase Shift between , P0 ! P1 is 2p F = kD where k = l with lens in place, at distance h from optical, F = k0d1 + d2 +n(D − d1 − d2)1 Air Glass @ A which can be arranged to|giv{ze } | {z } F = knD − k(n − 1)(d1 + d2) where d1 and d2 depend on h, the ray height. -

Understanding Basic Optics
Understanding Basic Optics Lenses What are lenses? Lenses bend light in useful ways. Most devices that control light have one or more lenses in them (some use only mirrors, which can do most of the same things that lenses can do). There are TWO basic simple lens types: CONVEX or POSITIVE lenses will CONVERGE or FOCUS light and can form an IMAGE CONCAVE or NEGATIVE lenses will DIVERGE (spread out) light rays You can have mixed lens shapes too: For a nice interactive demonstration of the behavior of different shaped lenses from another educational site, click here (the other site will open in a new browser window). Complex Lenses Simple or Complex? Simple lenses can't form very sharp images, so lens designers or optical engineers figure out how to combine the simple types to make complex lenses that work better. We use special computer programs to help us do this because it can take BILLIONS and BILLIONS of calculations. Camera lens This complex lens has 6 simple lens elements - click the small picture to see the whole camera. Zoom lens for home video camera (13 elements) A professional TV zoom lens used to broadcast sports could have 40 elements and cost over $100,000! Magnifying Glass: A simple optical device This diagram (click it to see a bigger version) shows how a magnifying glass bends light rays to make things look bigger than they are. Many optical devices use the same basic idea of bending the light to fool your eye and brain so light LOOKS like it came from a different (usually larger or closer) object. -

Digital Cameras Lenses Lenses Lenses
Lenses Digital Cameras • Light focused by the lens Lenses Aperture Shutter Speed Holding a Camera Steady Shooting Modes ISO Lenses Lenses • Positive lens What is difference in perspective between these – Converging lens two pictures? – Focuses image • Negative lens – Diverging lens – Spreads image out • Actual camera lens – Collection of lenses, called “elements” 1 Lenses Lenses • Field of view depends on focal length of lens. For a simple lens the focal Most digital cameras have zoom lenses length is the distance from the center of the lens to the sensor. • Wide Angle – Wide field of view – Most of subject reaches sensor – Expansive photo • Telephoto – Narrow field of view – Small portion of subject reaches sensor Wide angle Telephoto – Magnified Optical zoom is good. Digital zoom is not. Zoom Lenses Telephoto Both of these pictures were taken with a telephoto lens. • Simplified diagram below What features of telephoto shots do they illustrate? 2 Telephoto Wide Angle Compresses and Isolates the subject Both of these pictures were shot with a wide angle lens. flattens the image What features of wide angle shots do they illustrate? Wide Angle Focal Length and Lens Type 1. Expansive view 2. Easier to keep Perspective distortion • 35 mm camera everything in focus – Normal lens: focal length = 50 to 55 mm – Wide angle lens: 35 mm or smaller – Telephoto: 65 mm lens or larger • Digital camera – Smaller sensor – Lenses more like telephoto 3 Digital Multiplier Aperture • Digital multiplier converts focal length of digital camera • The diaphragm -
Chapter 4 Light and Optics
Chapter 4 Light and Optics Steven M. LaValle University of Oulu Copyright Steven M. LaValle 2019 Available for downloading at http://vr.cs.uiuc.edu/ 98 S. M. LaValle: Virtual Reality Chapter 4 Light and Optics Knowing how light propagates in the physical world is crucial to understanding VR. One reason is the interface between visual displays and our eyes. Light is emitted from displays and arrives on our retinas in a way that convincingly Figure 4.1: Waves and visibility rays emanating from a point light source. reproduces how light arrives through normal vision in the physical world. In the current generation of VR headsets, a system of both engineered and natural lenses (parts of our eyes) guide the light. Another reason to study light propagation is 2. Waves: Ripples through space that are similar to waves propagating on the the construction of virtual worlds. Chapter 3 covered purely geometric aspects surface of water, but are 3D. The wavelength is the distance between peaks. of modeling. The next logical step is to model the physics of light propagation This interpretation is helpful when considering the spectrum of colors. through virtual worlds; this will be continued in Chapter 7, which describes what should be rendered on the visual display. Finally, light propagation is also helpful 3. Rays: A ray traces the motion of a single hypothetical photon. The direction to understanding how cameras work, which provides another way present a virtual is perpendicular to the wavefronts (see Figure 4.1). This interpretation is world: Through panoramic videos. Cameras are also important for tracking, which helpful when explaining lenses and defining the concept of visibility. -

Basic Geometrical Optics
FUNDAMENTALS OF PHOTONICS Module 1.3 Basic Geometrical Optics Leno S. Pedrotti CORD Waco, Texas Optics is the cornerstone of photonics systems and applications. In this module, you will learn about one of the two main divisions of basic optics—geometrical (ray) optics. In the module to follow, you will learn about the other—physical (wave) optics. Geometrical optics will help you understand the basics of light reflection and refraction and the use of simple optical elements such as mirrors, prisms, lenses, and fibers. Physical optics will help you understand the phenomena of light wave interference, diffraction, and polarization; the use of thin film coatings on mirrors to enhance or suppress reflection; and the operation of such devices as gratings and quarter-wave plates. Prerequisites Before you work through this module, you should have completed Module 1-1, Nature and Properties of Light. In addition, you should be able to manipulate and use algebraic formulas, deal with units, understand the geometry of circles and triangles, and use the basic trigonometric functions (sin, cos, tan) as they apply to the relationships of sides and angles in right triangles. 73 Downloaded From: https://www.spiedigitallibrary.org/ebooks on 1/8/2019 DownloadedTerms of Use: From:https://www.spiedigitallibrary.org/terms-of-use http://ebooks.spiedigitallibrary.org/ on 09/18/2013 Terms of Use: http://spiedl.org/terms F UNDAMENTALS OF P HOTONICS Objectives When you finish this module you will be able to: • Distinguish between light rays and light waves. • State the law of reflection and show with appropriate drawings how it applies to light rays at plane and spherical surfaces. -

Efficient Monte Carlo Rendering with Realistic Lenses
EUROGRAPHICS 2014 / B. Lévy and J. Kautz Volume 33 (2014), Number 2 (Guest Editors) Efficient Monte Carlo Rendering with Realistic Lenses Johannes Hanika and Carsten Dachsbacher, Karlsruhe Institute of Technology, Germany ray traced 1891 spp ray traced 1152 spp Taylor 2427 spp our fit 2307 spp reference aperture sampling our fit difference Figure 1: Equal time comparison (40min, 640×960 resolution): rendering with a virtual lens (Canon 70-200mm f/2.8L at f/2.8) using spectral path tracing with next event estimation and Metropolis light transport (Kelemen mutations [KSKAC02]). Our method enables efficient importance sampling and the degree 4 fit faithfully reproduces the subtle chromatic aberrations (only a slight overall shift is introduced) while being faster to evaluate than ray tracing, naively or using aperture sampling, through the lens system. Abstract In this paper we present a novel approach to simulate image formation for a wide range of real world lenses in the Monte Carlo ray tracing framework. Our approach sidesteps the overhead of tracing rays through a system of lenses and requires no tabulation. To this end we first improve the precision of polynomial optics to closely match ground-truth ray tracing. Second, we show how the Jacobian of the optical system enables efficient importance sampling, which is crucial for difficult paths such as sampling the aperture which is hidden behind lenses on both sides. Our results show that this yields converged images significantly faster than previous methods and accurately renders complex lens systems with negligible overhead compared to simple models, e.g. the thin lens model. -

Efficient Monte Carlo Rendering with Realistic Lenses
Additional Material for: Efficient Monte Carlo Rendering with Realistic Lenses Johannes Hanika and Carsten Dachsbacher, Karlsruhe Institute of Technology, Germany 1 Adaptation of smallpt Figure 1: Smallpt without and with lens distortion. The lens system is a simple lensbaby- like lens to clearly show all aberrations. Since smallpt does not support spectral rendering, we used a grey transport version of the polynomials. We need to add 6 lines of code (not counting the preprocessor switches). The curved edges in the left image are due to the fact that the walls are actually modeled as spheres in this renderer. Listing 1 shows modified smallpt source code with camera distortion. The block between #if 1 and #else applies the transform. Sampling is done through the inner pupil and the transformation function is applied, i.e. no aperture importance sampling is done. The results with and without lens distortions can be seen in Figure 1. Listing 1: Adapted smallpt code #include <math . h> // smallpt,a Path Tracer by Kevin Beason, 2008 #include <s t d l i b . h> // Make:g++ −O3 −fopenmp smallpt.cpp −o smallpt #include <s t d i o . h> // Remove" −fopenmp" forg++ version < 4 . 2 s t r u c t Vec f // Usage: time./smallpt 5000 && xv image. ppm double x , y , z ;// position, also color(r,g,b) Vec (double x_=0, double y_=0, double z_=0)f x=x_ ; y=y_ ; z=z_ ; g Vec o p e r a t o r+(const Vec &b ) const f r e t u r n Vec ( x+b . -

Simple Lens Prelab by Dr
Simple Lens Prelab by Dr. Christine P. Cheney, Department of Physics and Astronomy, 401 Nielsen Physics Building, The University of Tennessee, Knoxville, Tennessee 37996-1200 © 2018 by Christine P. Cheney* *All rights are reserved. No part of this publication may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying, recording, or any information storage or retrieval system, without the permission in writing from the author. Lenses are a common tool used in our everyday life (eyes, glasses, cameras, telescopes,…). In normal vision, the lens of your eye focuses an image onto your retina. The image is real and inverted, but your brain flips the image so that you process it as right-side up. If you are nearsighted (myopia), then the image is formed in front of the retina, and if you are farsighted (hyperopia), the image is formed behind the retina. The eye has ciliary muscles that help to shape the lens to see at different distances. If you are nearsighted, then things far away are blurry because your lens is too long.1 Your vision can be corrected with a diverging lens. If you are farsighted, then things close to you are blurry because your lens is too short. Your vision can be corrected with a converging lens. The size of the aperture of a camera lens contributes to the depth of field. A small aperture lens like your phone camera has a large depth of field because only a narrow range of light rays can enter the lens.2, 3 Everything is mostly in focus, but the camera does not operate well in poor light.