Chapter 3 (Aberrations)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
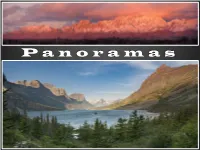
Panoramas Shoot with the Camera Positioned Vertically As This Will Give the Photo Merging Software More Wriggle-Room in Merging the Images
P a n o r a m a s What is a Panorama? A panoramic photo covers a larger field of view than a “normal” photograph. In general if the aspect ratio is 2 to 1 or greater then it’s classified as a panoramic photo. This sample is about 3 times wider than tall, an aspect ratio of 3 to 1. What is a Panorama? A panorama is not limited to horizontal shots only. Vertical images are also an option. How is a Panorama Made? Panoramic photos are created by taking a series of overlapping photos and merging them together using software. Why Not Just Crop a Photo? • Making a panorama by cropping deletes a lot of data from the image. • That’s not a problem if you are just going to view it in a small format or at a low resolution. • However, if you want to print the image in a large format the loss of data will limit the size and quality that can be made. Get a Really Wide Angle Lens? • A wide-angle lens still may not be wide enough to capture the whole scene in a single shot. Sometime you just can’t get back far enough. • Photos taken with a wide-angle lens can exhibit undesirable lens distortion. • Lens cost, an auto focus 14mm f/2.8 lens can set you back $1,800 plus. What Lens to Use? • A standard lens works very well for taking panoramic photos. • You get minimal lens distortion, resulting in more realistic panoramic photos. • Choose a lens or focal length on a zoom lens of between 35mm and 80mm. -
Making Your Own Astronomical Camera by Susan Kern and Don Mccarthy
www.astrosociety.org/uitc No. 50 - Spring 2000 © 2000, Astronomical Society of the Pacific, 390 Ashton Avenue, San Francisco, CA 94112. Making Your Own Astronomical Camera by Susan Kern and Don McCarthy An Education in Optics Dissect & Modify the Camera Loading the Film Turning the Camera Skyward Tracking the Sky Astronomy Camp for All Ages For More Information People are fascinated by the night sky. By patiently watching, one can observe many astronomical and atmospheric phenomena, yet the permanent recording of such phenomena usually belongs to serious amateur astronomers using moderately expensive, 35-mm cameras and to scientists using modern telescopic equipment. At the University of Arizona's Astronomy Camps, we dissect, modify, and reload disposed "One- Time Use" cameras to allow students to study engineering principles and to photograph the night sky. Elementary school students from Silverwood School in Washington state work with their modified One-Time Use cameras during Astronomy Camp. Photo courtesy of the authors. Today's disposable cameras are a marvel of technology, wonderfully suited to a variety of educational activities. Discarded plastic cameras are free from camera stores. Students from junior high through graduate school can benefit from analyzing the cameras' optics, mechanisms, electronics, light sources, manufacturing techniques, and economics. Some of these educational features were recently described by Gene Byrd and Mark Graham in their article in the Physics Teacher, "Camera and Telescope Free-for-All!" (1999, vol. 37, p. 547). Here we elaborate on the cameras' optical properties and show how to modify and reload one for astrophotography. An Education in Optics The "One-Time Use" cameras contain at least six interesting optical components. -
A N E W E R a I N O P T I
A NEW ERA IN OPTICS EXPERIENCE AN UNPRECEDENTED LEVEL OF PERFORMANCE NIKKOR Z Lens Category Map New-dimensional S-Line Other lenses optical performance realized NIKKOR Z NIKKOR Z NIKKOR Z Lenses other than the with the Z mount 14-30mm f/4 S 24-70mm f/2.8 S 24-70mm f/4 S S-Line series will be announced at a later date. NIKKOR Z 58mm f/0.95 S Noct The title of the S-Line is reserved only for NIKKOR Z lenses that have cleared newly NIKKOR Z NIKKOR Z established standards in design principles and quality control that are even stricter 35mm f/1.8 S 50mm f/1.8 S than Nikon’s conventional standards. The “S” can be read as representing words such as “Superior”, “Special” and “Sophisticated.” Top of the S-Line model: the culmination Versatile lenses offering a new dimension Well-balanced, of the NIKKOR quest for groundbreaking in optical performance high-performance lenses Whichever model you choose, every S-Line lens achieves richly detailed image expression optical performance These lenses bring a higher level of These lenses strike an optimum delivering a sense of reality in both still shooting and movie creation. It offers a new This lens has the ability to depict subjects imaging power, achieving superior balance between advanced in ways that have never been seen reproduction with high resolution even at functionality, compactness dimension in optical performance, including overwhelming resolution, bringing fresh before, including by rendering them with the periphery of the image, and utilizing and cost effectiveness, while an extremely shallow depth of field. -

Ground-Based Photographic Monitoring
United States Department of Agriculture Ground-Based Forest Service Pacific Northwest Research Station Photographic General Technical Report PNW-GTR-503 Monitoring May 2001 Frederick C. Hall Author Frederick C. Hall is senior plant ecologist, U.S. Department of Agriculture, Forest Service, Pacific Northwest Region, Natural Resources, P.O. Box 3623, Portland, Oregon 97208-3623. Paper prepared in cooperation with the Pacific Northwest Region. Abstract Hall, Frederick C. 2001 Ground-based photographic monitoring. Gen. Tech. Rep. PNW-GTR-503. Portland, OR: U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station. 340 p. Land management professionals (foresters, wildlife biologists, range managers, and land managers such as ranchers and forest land owners) often have need to evaluate their management activities. Photographic monitoring is a fast, simple, and effective way to determine if changes made to an area have been successful. Ground-based photo monitoring means using photographs taken at a specific site to monitor conditions or change. It may be divided into two systems: (1) comparison photos, whereby a photograph is used to compare a known condition with field conditions to estimate some parameter of the field condition; and (2) repeat photo- graphs, whereby several pictures are taken of the same tract of ground over time to detect change. Comparison systems deal with fuel loading, herbage utilization, and public reaction to scenery. Repeat photography is discussed in relation to land- scape, remote, and site-specific systems. Critical attributes of repeat photography are (1) maps to find the sampling location and of the photo monitoring layout; (2) documentation of the monitoring system to include purpose, camera and film, w e a t h e r, season, sampling technique, and equipment; and (3) precise replication of photographs. -

High-Quality Computational Imaging Through Simple Lenses
High-Quality Computational Imaging Through Simple Lenses Felix Heide1, Mushfiqur Rouf1, Matthias B. Hullin1, Bjorn¨ Labitzke2, Wolfgang Heidrich1, Andreas Kolb2 1University of British Columbia, 2University of Siegen Fig. 1. Our system reliably estimates point spread functions of a given optical system, enabling the capture of high-quality imagery through poorly performing lenses. From left to right: Camera with our lens system containing only a single glass element (the plano-convex lens lying next to the camera in the left image), unprocessed input image, deblurred result. Modern imaging optics are highly complex systems consisting of up to two pound lens made from two glass types of different dispersion, i.e., dozen individual optical elements. This complexity is required in order to their refractive indices depend on the wavelength of light differ- compensate for the geometric and chromatic aberrations of a single lens, ently. The result is a lens that is (in the first order) compensated including geometric distortion, field curvature, wavelength-dependent blur, for chromatic aberration, but still suffers from the other artifacts and color fringing. mentioned above. In this paper, we propose a set of computational photography tech- Despite their better geometric imaging properties, modern lens niques that remove these artifacts, and thus allow for post-capture cor- designs are not without disadvantages, including a significant im- rection of images captured through uncompensated, simple optics which pact on the cost and weight of camera objectives, as well as in- are lighter and significantly less expensive. Specifically, we estimate per- creased lens flare. channel, spatially-varying point spread functions, and perform non-blind In this paper, we propose an alternative approach to high-quality deconvolution with a novel cross-channel term that is designed to specifi- photography: instead of ever more complex optics, we propose cally eliminate color fringing. -
Spherical Aberration ¥ Field Angle Effects (Off-Axis Aberrations) Ð Field Curvature Ð Coma Ð Astigmatism Ð Distortion
Astronomy 80 B: Light Lecture 9: curved mirrors, lenses, aberrations 29 April 2003 Jerry Nelson Sensitive Countries LLNL field trip 2003 April 29 80B-Light 2 Topics for Today • Optical illusion • Reflections from curved mirrors – Convex mirrors – anamorphic systems – Concave mirrors • Refraction from curved surfaces – Entering and exiting curved surfaces – Converging lenses – Diverging lenses • Aberrations 2003 April 29 80B-Light 3 2003 April 29 80B-Light 4 2003 April 29 80B-Light 8 2003 April 29 80B-Light 9 Images from convex mirror 2003 April 29 80B-Light 10 2003 April 29 80B-Light 11 Reflection from sphere • Escher drawing of images from convex sphere 2003 April 29 80B-Light 12 • Anamorphic mirror and image 2003 April 29 80B-Light 13 • Anamorphic mirror (conical) 2003 April 29 80B-Light 14 • The artist Hans Holbein made anamorphic paintings 2003 April 29 80B-Light 15 Ray rules for concave mirrors 2003 April 29 80B-Light 16 Image from concave mirror 2003 April 29 80B-Light 17 Reflections get complex 2003 April 29 80B-Light 18 Mirror eyes in a plankton 2003 April 29 80B-Light 19 Constructing images with rays and mirrors • Paraxial rays are used – These rays may only yield approximate results – The focal point for a spherical mirror is half way to the center of the sphere. – Rule 1: All rays incident parallel to the axis are reflected so that they appear to be coming from the focal point F. – Rule 2: All rays that (when extended) pass through C (the center of the sphere) are reflected back on themselves. -

Tessar and Dagor Lenses
Tessar and Dagor lenses Lens Design OPTI 517 Prof. Jose Sasian Important basic lens forms Petzval DB Gauss Cooke Triplet little stress Stressed with Stressed with Low high-order Prof. Jose Sasian high high-order aberrations aberrations Measuring lens sensitivity to surface tilts 1 u 1 2 u W131 AB y W222 B y 2 n 2 n 2 2 1 1 1 1 u 1 1 1 u as B y cs A y 1 m Bstop ystop n'u' n 1 m ystop n'u' n CS cs 2 AS as 2 j j Prof. Jose Sasian Lens sensitivity comparison Coma sensitivity 0.32 Astigmatism sensitivity 0.27 Coma sensitivity 2.87 Astigmatism sensitivity 0.92 Coma sensitivity 0.99 Astigmatism sensitivity 0.18 Prof. Jose Sasian Actual tough and easy to align designs Off-the-shelf relay at F/6 Coma sensitivity 0.54 Astigmatism sensitivity 0.78 Coma sensitivity 0.14 Astigmatism sensitivity 0.21 Improper opto-mechanics leads to tough alignment Prof. Jose Sasian Tessar lens • More degrees of freedom • Can be thought of as a re-optimization of the PROTAR • Sharper than Cooke triplet (low index) • Compactness • Tessar, greek, four • 1902, Paul Rudolph • New achromat reduces lens stress Prof. Jose Sasian Tessar • The front component has very little power and acts as a corrector of the rear component new achromat • The cemented interface of the new achromat: 1) reduces zonal spherical aberration, 2) reduces oblique spherical aberration, 3) reduces zonal astigmatism • It is a compact lens Prof. Jose Sasian Merte’s Patent of 1932 Faster Tessar lens F/5.6 Prof. -

Applied Physics I Subject Code: PHY-106 Set: a Section: …………………………
Test-1 Subject: Applied Physics I Subject Code: PHY-106 Set: A Section: ………………………….. Max. Marks: 30 Registration Number: ……………… Max. Time: 45min Roll Number: ………………………. Question 1. Define systematic and random errors. (5) Question 2. In an experiment in determining the density of a rectangular block, the dimensions of the block are measured with a vernier caliper with least count of 0.01 cm and its mass is measured with a beam balance of least count 0.1 g, l = 5.12 cm, b = 2.56 cm, t = 0.37 cm and m = 39.3 g. Report correctly the density of the block. (10) Question 3. Derive a relation to overcome chromatic aberration for an optical system consisting of two convex lenses. (5) Question 4. An achromatic doublet of focal length 20 cm is to be made by placing a convex lens of borosilicate crown glass in contact with a diverging lens of dense flint glass. Assuming nr = 1.51462, nb = ′ ′ 1.52264, 푛푟 = 1.61216, and 푛푏 = 1.62901, calculate the focal length of each lens; here the unprimed and the primed quantities refer to the borosilicate crown glass and dense flint glass, respectively. (10) Test-1 Subject: Applied Physics I Subject Code: PHY-106 Set: B Section: ………………………….. Max. Marks: 30 Registration Number: ……………… Max. Time: 45min Roll Number: ………………………. Question 1. Distinguish accuracy and precision with example. (5) Question 2. Obtain an expression for chromatic aberration in the image formed by paraxial rays. (5) Question 3. It is required to find the volume of a rectangular block. A vernier caliper is used to measure the length, width and height of the block. -

Carl Zeiss Oberkochen Large Format Lenses 1950-1972
Large format lenses from Carl Zeiss Oberkochen 1950-1972 © 2013-2019 Arne Cröll – All Rights Reserved (this version is from October 4, 2019) Carl Zeiss Jena and Carl Zeiss Oberkochen Before and during WWII, the Carl Zeiss company in Jena was one of the largest optics manufacturers in Germany. They produced a variety of lenses suitable for large format (LF) photography, including the well- known Tessars and Protars in several series, but also process lenses and aerial lenses. The Zeiss-Ikon sister company in Dresden manufactured a range of large format cameras, such as the Zeiss “Ideal”, “Maximar”, Tropen-Adoro”, and “Juwel” (Jewel); the latter camera, in the 3¼” x 4¼” size, was used by Ansel Adams for some time. At the end of World War II, the German state of Thuringia, where Jena is located, was under the control of British and American troops. However, the Yalta Conference agreement placed it under Soviet control shortly thereafter. Just before the US command handed the administration of Thuringia over to the Soviet Army, American troops moved a considerable part of the leading management and research staff of Carl Zeiss Jena and the sister company Schott glass to Heidenheim near Stuttgart, 126 people in all [1]. They immediately started to look for a suitable place for a new factory and found it in the small town of Oberkochen, just 20km from Heidenheim. This led to the foundation of the company “Opton Optische Werke” in Oberkochen, West Germany, on Oct. 30, 1946, initially as a full subsidiary of the original factory in Jena. -

Visual Effect of the Combined Correction of Spherical and Longitudinal Chromatic Aberrations
Visual effect of the combined correction of spherical and longitudinal chromatic aberrations Pablo Artal 1,* , Silvestre Manzanera 1, Patricia Piers 2 and Henk Weeber 2 1Laboratorio de Optica, Centro de Investigación en Optica y Nanofísica (CiOyN), Universidad de Murcia, Campus de Espinardo, 30071 Murcia, Spain 2AMO Groningen, Groningen, The Netherlands *[email protected] Abstract: An instrument permitting visual testing in white light following the correction of spherical aberration (SA) and longitudinal chromatic aberration (LCA) was used to explore the visual effect of the combined correction of SA and LCA in future new intraocular lenses (IOLs). The LCA of the eye was corrected using a diffractive element and SA was controlled by an adaptive optics instrument. A visual channel in the system allows for the measurement of visual acuity (VA) and contrast sensitivity (CS) at 6 c/deg in three subjects, for the four different conditions resulting from the combination of the presence or absence of LCA and SA. In the cases where SA is present, the average SA value found in pseudophakic patients is induced. Improvements in VA were found when SA alone or combined with LCA were corrected. For CS, only the combined correction of SA and LCA provided a significant improvement over the uncorrected case. The visual improvement provided by the correction of SA was higher than that from correcting LCA, while the combined correction of LCA and SA provided the best visual performance. This suggests that an aspheric achromatic IOL may provide some visual benefit when compared to standard IOLs. ©2010 Optical Society of America OCIS codes: (330.0330) Vision, color, and visual optics; (330.4460) Ophthalmic optics and devices; (330.5510) Psycophysics; (220.1080) Active or adaptive optics. -

AG-AF100 28Mm Wide Lens
Contents 1. What change when you use the different imager size camera? 1. What happens? 2. Focal Length 2. Iris (F Stop) 3. Flange Back Adjustment 2. Why Bokeh occurs? 1. F Stop 2. Circle of confusion diameter limit 3. Airy Disc 4. Bokeh by Diffraction 5. 1/3” lens Response (Example) 6. What does In/Out of Focus mean? 7. Depth of Field 8. How to use Bokeh to shoot impressive pictures. 9. Note for AF100 shooting 3. Crop Factor 1. How to use Crop Factor 2. Foal Length and Depth of Field by Imager Size 3. What is the benefit of large sensor? 4. Appendix 1. Size of Imagers 2. Color Separation Filter 3. Sensitivity Comparison 4. ASA Sensitivity 5. Depth of Field Comparison by Imager Size 6. F Stop to get the same Depth of Field 7. Back Focus and Flange Back (Flange Focal Distance) 8. Distance Error by Flange Back Error 9. View Angle Formula 10. Conceptual Schema – Relationship between Iris and Resolution 11. What’s the difference between Video Camera Lens and Still Camera Lens 12. Depth of Field Formula 1.What changes when you use the different imager size camera? 1. Focal Length changes 58mm + + It becomes 35mm Full Frame Standard Lens (CANON, NIKON, LEICA etc.) AG-AF100 28mm Wide Lens 2. Iris (F Stop) changes *distance to object:2m Depth of Field changes *Iris:F4 2m 0m F4 F2 X X <35mm Still Camera> 0.26m 0.2m 0.4m 0.26m 0.2m F4 <4/3 inch> X 0.9m X F2 0.6m 0.4m 0.26m 0.2m Depth of Field 3. -

Glossary of Lens Terms
GLOSSARY OF LENS TERMS The following three pages briefly define the optical terms used most frequently in the preceding Lens Theory Section, and throughout this catalog. These definitions are limited to the context in which the terms are used in this catalog. Aberration: A defect in the image forming capability of a Convex: A solid curved surface similar to the outside lens or optical system. surface of a sphere. Achromatic: Free of aberrations relating to color or Crown Glass: A type of optical glass with relatively low Lenses wavelength. refractive index and dispersion. Airy Pattern: The diffraction pattern formed by a perfect Diffraction: Deviation of the direction of propagation of a lens with a circular aperture, imaging a point source. The radiation, determined by the wave nature of radiation, and diameter of the pattern to the first minimum = 2.44 λ f/D occurring when the radiation passes the edge of an Where: obstacle. λ = Wavelength Diffraction Limited Lens: A lens with negligible residual f = Lens focal length aberrations. D = Aperture diameter Dispersion: (1) The variation in the refractive index of a This central part of the pattern is sometimes called the Airy medium as a function of wavelength. (2) The property of an Filters Disc. optical system which causes the separation of the Annulus: The figure bounded by and containing the area monochromatic components of radiation. between two concentric circles. Distortion: An off-axis lens aberration that changes the Aperture: An opening in an optical system that limits the geometric shape of the image due to a variation of focal amount of light passing through the system.