Design and Integration of an Actuated Nose Strake Control System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
TOC for GSA Pricing
Brunswick Commercial & Government Products 2005 Price List for Indiana Department of Natural Resources Contract #RSP-5-52 Brunswick Commercial & Government Products, Inc. reserves the right to modify or discontinue models, equipment or prices at any time without incurring obligation. BUILT FOR THE MISSION.TM BRUNSWICK COMMERCIAL & GOVERNMENT PRODUCTS, INC. 420 Megan Z Avenue • Edgewater, FL 32132 • Phone 386.423.2900 • Fax 386.423.9187 www.brunswickCGboats.com ENGINE PRE-RIG KITS INCLUDE THE FOLLOWING: MERCURY SINGLE O/B ENGINE PRE-RIG (61420) MERCURY DUAL O/B ENGINE PRE-RIG (61421) FUEL FILTER/WATER SEPERATOR (BOATS WITH BUILT IN FUEL TANK) (SEE NOTE 1) (2) FUEL FILTER/WATER SEPERATOR (BOATS WITH BUILT IN FUEL TANK) (SEE NOTE 1) ELECTRIC FUEL GAUGE (BOATS WITH BUILT IN FUEL TANK) ELECTRIC FUEL GAUGE (BOATS WITH BUILT IN FUEL TANK) BINNACLE BINNACLE WIRING HARNESS, KEY SWITCH & ALARM HORN WIRING HARNESS, KEY SWITCH & ALARM HORN SHIFT & THROTTLE CABLES SHIFT & THROTTLE CABLES TACHOMETER (2) TACHOMETER VOLTMETER (2) VOLTMETER TRIM GAUGE (2) TRIM GAUGE HOUR METER (2) HOUR METER ENGINE TIE BAR KIT BOMBARDIER SINGLE O/B ENGINE PRE-RIG (61422) BOMBARDIER DUAL O/B ENGINE PRE-RIG (61423) FUEL FILTER/WATER SEPERATOR (BOATS WITH BUILT IN FUEL TANK) (2) FUEL FILTER/WATER SEPERATOR (BOATS WITH BUILT IN FUEL TANK) ELECTRIC FUEL GAUGE (BOATS WITH BUILT IN FUEL TANK) ELECTRIC FUEL GAUGE (BOATS WITH BUILT IN FUEL TANK) BINNACLE BINNACLE WIRING HARNESS, KEY SWITCH & ALARM HORN WIRING HARNESS, KEY SWITCH & ALARM HORN SHIFT & THROTTLE CABLES SHIFT & THROTTLE -

The Elements of Wood Ship Construction
THE ELEMENTS OF WOOD SHIP CONSTRUCTION Digitized by the Internet Archive in 2007 with funding from Microsoft Corporation http://www.archive.org/details/elementsofwoodshOOcurtrich Digitized file changed into text by AK, Feb. 2012 THE ELEMENTS OF WOOD SHIP CONSTRUCTION THE ELEMENTS OF WOOD SHIP CONSTRUCTION BY W. H. CURTIS NAVAL ARCHITECT AND MARINE ENGINEER FIRST EDITION McGRAW-HILL BOOK COMPANY, INC. 239 WEST 39TH STREET. NEW YORK ----------- LONDON: HILL PUBLISHING CO., Ltd. 6 & 8 BOUVERIE ST., E. C 1919 COPYRIGHT. 1919, BY THE MCGRAW-HILL BOOK COMPANY, INC. ------------ COPYRIGHT, 1918, BY W. H. CURTIS. THE MAPLE PRESS YORK PA GENERAL PREFACE ------------- Preface to Pamphlet, Part I, issued by the United States Shipping Board Emergency Fleet Corporation, for use in its classes in Wood Shipbuilding. This text on wood shipbuilding was prepared by W. H. Curtis, Portland, Oregon, for the Education and Training Section of the Emergency Fleet Corporation. It is intended for the use of carpenters and others, who, though skilled in their work, lack the detail knowledge of ships necessary for the efficient performance of their work in the yard. Sea-going vessels are generally built according to the rules of some Classification Society, and all important construction and fastening details have to be passed upon by the Classification Society under whose inspection the vessel is to be built. Due to this fact, requirements may vary in detail from types of construction here explained. It is hoped, however, that this book may be helpful to shipbuilding classes and to individual men in the yard. EDUCATION AND TRAINING SECTION UNITED STATES SHIPPING BOARD EMERGENCY FLEET CORPORATION In presenting this work due credit is given Mr. -

ACHILLES INFLATABLE BOATS a Division of Achilles USA, Inc
2018 INFLATABLE BOATS It begins with the best fabric. Designed and built with safety Because our boats last, Our quality CSM fabric has and performance in mind. so does our support. such a great reputation in the From built-in safety features like We provide our dealers and inflatable boat industry that the strongest four-layer seam customers with comprehensive other inflatable boat manufac- construction in the industry to and responsive post-sales turers buy their fabric from us. custom designs engineered to support in every aspect of It all starts with an exterior complement and enhance the Achilles ownership. Our The Achilles boating experience begins with best inflatable coating of our custom CSM performance of each of our customer and mobile-friendly boat fabric, designs and options and ends with unsurpassed over a heavy duty fabric which boats, boaters get more out of web site not only offers customer support for as long as you own your boat. makes our inflatables virtually an Achilles. Our boats are built comprehensive information In between you will enjoy years of on-the-water activities impervious to the elements, oil, to not only last, but to also about our current models, in the most durable inflatable boat you can find. gasoline and abrasions. And it deliver the practicality you but also on all Achilles boats ends with two interior coatings expect from an inflatable with- produced since 1978. of Chloroprene for unsurpassed out sacrificing the performance CSM exterior for air retention. you want from any boat. toughness www.achillesboats.com Heavy-duty Nylon or Polyester core fabric A SMOOTH, SIMPLE OAR SYSTEM NON-CORROSIVE CHECK VALVES Two layers of Chloroprene We invented the fold-down, locking oar system All Achilles valves are non-corrosive with no moving for unsurpassed that makes rowing a breeze while keeping oars parts that might break. -
Swift Trawler 44
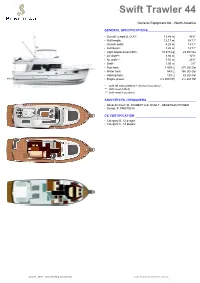
Swift Trawler 44 General Equipment list - North America GENERAL SPECIFICATIONS___________________________ • Overall Length (L.O.A)*: 13,88 m 45’6’’ • Hull length: 12,17 m 39’11’’ • Overall width: 4,25 m 13’11’’ • Hull Beam: 4,25 m 13’11’’ • Light displacement (EC): 10 870 kg 23,957 lbs • Air draft**: 3,86 m 12’8’’ • Air draft***: 7,76 m 25’6’’ •Draft: 1,05m 3’5’’ • Fuel tank: 1 400 L 370 US Gal • Water tank: 640 L 169 US Gal • Holding tank: 120 L 32 US Gal • Engine power: 2 x 300 HP 2x300HP * (with aft swim platform + Anchor in position) ** (with mast folded) *** (with mast in position) ARCHITECTS / DESIGNERS ___________________________ • Naval Architect: M. JOUBERT & B. NIVELT - BENETEAU POWER • Design: P. FRUTSCHI CE CERTIFICATION __________________________________ • Category B: 12 people • Category C: 14 people July 01, 2018 - (non-binding document) Code Beneteau M100136 (Q) US Swift Trawler 44 General Equipment list - North America STANDARD EQUIPMENT FLY BRIDGE • Flybridge self-bailing CONSTRUCTION ____________________________________ • Stainless steel staircase and access ramp to flybridge with teak treads • Grey tinted windscreen in PMMA HULL • Access via PMMA hatch Composition: • Stainless steel pulpit surrounding aft of flybridge • Sandwich (polyester resin - fiberglass / balsa core) • White lacquered swing mast, Navigation light mounting, Radar, Aerial • White gel coat • Central steering console • Structural hull counter molding in monolithic laminate (polyester resin - • Control panel including: Electrical engine controls, Electric -

Vistara Soars Toward Expansion New Flight-Planning Technology Enhances Safety, Cuts Costs
MOBILITY ENGINEERINGTM AUTOMOTIVE, AEROSPACE, OFF-HIGHWAY A quarterly publication of and Vistara soars toward expansion New flight-planning technology enhances safety, cuts costs Base-engine value engineering Deriving optimum efficiency, performance Autos & The Internet of Things How the IoT is disrupting the auto industry Software’s expanding role Escalating software volumes shifting design, systems integration Volume 3, Issue 2 June 2016 ME Molex Ad 0616.qxp_Mobility FP 4/28/16 5:00 PM Page 1 Support Tomorrow’s Speeds with Proven Connectivity Simply Solved In Automotive, consumer demand is changing even faster than technology. When you collaborate with Molex, we can develop a complete solution that will support tomorrow’s data speeds, backed by proven performance. Together, we can simplify your design and manufacturing processes — while minimizing space and maximizing connectivity throughout the vehicle. www.molex.com/a/connectedvehicle/in CONTENTS Features 40 Base-engine value engineering 49 Agility training for cars for higher fuel efficiency and AUTOMOTIVE CHASSIS enhanced performance Chassis component suppliers refine vehicle dynamics at AUTOMOTIVE POWERTRAIN the high end and entry level with four-wheel steering and adaptive damping. Continuous improvement in existing engines can be efficiently achieved with a value engineering approach. The integration of product development with value 52 Evaluating thermal design of engineering ensures the achievement of specified targets construction vehicles in a systematic manner and within a defined timeframe. OFF-HIGHWAY SIMULATION CFD simulation is used to evaluate two critical areas that 43 Integrated system engineering address challenging thermal issues: electronic control units for valvetrain design and and hot-air recirculation. development of a high-speed diesel engine AUTOMOTIVE POWERTRAIN The lead time for engine development has reduced significantly with the advent of advanced simulation Cover techniques. -

United States Patent (19) 11) Patent Number: 4,691,879 Greene 45) Date of Patent: Sep
United States Patent (19) 11) Patent Number: 4,691,879 Greene 45) Date of Patent: Sep. 8, 1987 54 JET AIRPLANE gravity. Full control of the airplane is possible under 76 Inventor: Vibert F. Greene, 19400 Sorenson high maneuverability conditions, extremely high accel Ave., Cupertino, Calif. 95014 erations and at large angles of attack. The delta nose wing creates swirling vortices that contribute substan 21 Appl. No.: 875,024 tially to the lift of the nose section. The winglet, an 22). Filed: Jun. 16, 1986 extension of the delta nose wing, allows the turbulent wake from the leading edge of the delta nose wing to 51 Int. Cl." .............................................. B64C39/08 flow over its upper surface to create additional lift while 52 U.S.C. .................................... 244/45 R; 24.4/13; the midspan wing causes the turbulent flow over its 244/45 A; 244/15 upper surface to form a turbulent wake at its leading 58 Field of Search .................. 244/45 R, 45 A, 4 R, edge. The V-tail delta wing with a V-shaped underside 244/15, 13 and blunt leading edge gives additional lift and control (56) References Cited to the airplane. A flow regulator helps to direct and U.S. PATENT DOCUMENTS control the flow field to the underside of the delta nose D. 138,538 8/1944 Clerc .................................. D12/331 wing and nose strake. There are eight pairs of control D. 155,569 10/1949 Bailey ............ ... D12/331 surfaces including an upper body stabilizer system for 3,447,76 6/1969 Whitener et al. ..................... 244/5 the control and stability of the airplane. -

Water-Tunnel and Analytical Investigation of the Effect of Strake
https://ntrs.nasa.gov/search.jsp?R=19800019803 2020-03-21T17:02:56+00:00Z NASA TP " 1676 NASA Technical Paper 1676 ,.,I c. 1 Water-Tunneland Analytical Investigation of the Effect of Strake Design Variables on Strake VortexBreakdown. Characteristics Neal T. Frink and John E. Lamar AUGUST 1980 TECH LIBRARY KAFB, NM NASA Technical Paper 1676 Water-Tunnel andAnalytical Investigation of the Effect of Strake Design Variables on Strake VortexBreakdown Characteristics Neal T. Frink andJohn E. Lamar Lavzgley Research Cetzter Haznptorz, Virgivzia National Aeronautics and Space Administration Scientific and Technical Information Branch 1980 SUMMARY A systematic water tunnel study was made to determine the vortex breakdown characteristics of43 strakes, more than half of which were generated from a new analytical strake design method. The strakes were mountedon a l/2-scale model of a Langley Research Center general research fighter fuselage mode1 with a 44O leading-edge-sweep trapezoidal wing. This study develops, in conjunction with a common wing-body, a parametric set of strake data for use in establishing and verifying a new strake design procedure. To develop this parametric data base, several series of isolated strakes were designedon the basis of a simplified approach which relates pre- scribed suction and pressure distributions in a simplified flow field to plan- form shapes. The resulting planform shapes provided examples of the effects of the pri- mary design parameters of size, span, and slenderness on the vortex breakdown characteristics. These effects are analyzed in relation to the respective strake leading-edge suction distributions. Included are examples of the effects of detailed strake planform shaping for strakes with the same general size and slenderness. -
2008 INTERNATIONAL OPTIMIST CLASS RULES Authority*: International Sailing Federation
2008 INTERNATIONAL OPTIMIST CLASS RULES Authority*: International Sailing Federation * The ISAF is not a National Authority as described in these rules CONTENTS Page Rule 2 1 GENERAL 2 2. ADMINISTRATION 2 2.1 English language 2 2.2 Builders 3 2.3 International Class Fee 3 2.4 Registration and measurement certificate 4 2.5 Measurement 4 2.6 Measurement instructions 5 2.7 Identification marks 6 2.8 Advertising 6 3 CONSTRUCTION AND MEASUREMENT RULES 6 3.1 General 6 3.2 Hull 6 3.2.1 Materials - GRP 7 3.2.2 Hull measurement rules 10 3.2.3 Hull construction details - GRP 3.2.4 Hull construction details - Wood and Wood/Epoxy (See Appendix A, p 25) 3.2.5 Not used 12 3.2.6 Fittings 13 3.2.7 Buoyancy 14 3.2.8 Weight 14 3.3 Daggerboard 16 3.4 Rudder and Tiller 19 3.5 Spars 19 3.5.2 Mast 20 3.5.3 Boom 21 3.5.4 Sprit 21 3.5.5 Running rigging 22 4 ADDITIONAL RULES 5 (spare rule number) 23 6 SAIL 23 6.1 General 23 6.2 Mainsail 6.3 Spare rule number 6.4 Spare rule number 25 6.5 Class Insignia, National Letters, Sail Numbers and Luff Measurement Band 26 6.6 Additional sail rules 27 APPENDIX A: Rules specific to Wood and Wood/Epoxy hulls. 29 PLANS. Index of current official plans. 1 GENERAL 1.1 The object of the class is to provide racing for young people at low cost. -
4 INVENTOR 16%/6/S G
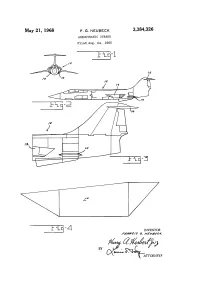
May 21, 1968 F. G., NEUBECK 3,384,326 AERODYNAMIC STRAKE Filed Aug. 24, 1965 - E - - 4 INVENTOR 16%/6/s G. MazMayaea ... it is ATTORNEYsa 3,384,326 United States Patent Office Patented May 21, 1968 1. 2 bination of parts involved in the embodiment of the inven 3,384,326 tion as will appear from the following description and AERODYNAMC STRAKE accompanying drawings, wherein: Francis G. Neubeck, Eglin Air Force Base, Fla. FIG. 1 is a front elevation of the airplane showing the (94.67 Somerset Lane, Cypress, Calif. 90630) 5 angular relationship of the strakes in relation to the ver Filed Aug. 24, 1965, Ser. No. 482,304 tical axis of the airplane; 1 Claim. (CI. 244-13) FIG. 2 is a side elevation of the airplane showing the longitudinal position of a strake; FIG. 3 is an enlarged view of the rear portion of FIG. ABSTRACT OF THE DISCLOSURE 2, and showing with greater clarity the relationship be An elongated aerodynamic strake for use on an air 0 tween the aerodynamic strake and well-known airplane plane, and being in the form of a pentahedral prominence elements; and in plan and joined to and extending from each lower FIG. 4 is an enlarged plan view of the strake only. quarter aft section of the fuselage between the trailing The aerodynamic strake 10, constituting this invention, edge of the wing and the leading edge of the horizontal 5 is joined to the exterior of the fuselage skin on airplane stabilizer to be in the upwash area for improving overall 12, as shown on FIG. -

Aerodynamic Design of the Strake for the Rocket Plane in Tailless Configuration
AERODYNAMIC DESIGN OF THE STRAKE FOR THE ROCKET PLANE IN TAILLESS CONFIGURATION. M. Figat, A. Kwiek, K. Seneńko Warsaw University of Technology Keywords: Optimization, gradient method, strake, CFD Abstract of the MAS. Moreover, the Rocket Plane is able The paper presents results of the to fly at high angles of attack. It is assumed that, aerodynamic design of the Rocket Plane in a it should be equipped with a strake. tailless configuration. It is part of a Modular Airplane System - MAS. The system is devoted to the space tourism and the Rocket Plane is the main component of the system. The main goal of the research was improving aerodynamic characteristic of the Rocket Plane. The paper presents the proposal of modification of the initial Rocket Plane geometry which is being results from the optimization process. The final geometry of the Rocket Plane is resulting of a number of optimization. 1 Introduction Fig. 1 Concept of the MAS Space tourism is a very promising and fast developing branch of an aerospace technology The mission profile of the MAS is [1]. Especially the idea of suborbital tourist presented in Fig. 2. The mission profile of the flights is a very promising concept. The main MAS consists of the following five main advantage of this type of flights is a lower price phases: [1] compare to a tourist visit on the International Take-off Space Station. During a suborbital flight the Objects separation boundary between the Earth’s atmosphere and outer space is crossed, zero gravity condition Climbing and ballistic flight appears due to parabolic trajectory. -
Effect of Wing Planform and Canard Location and Geometry on the of a Close-Coupled Canard Wing
AND NASA TECHNICAL NOTE NASA TN D-7910 o-J WING PLANFORM N75-23514 -- (NASA-TN-D-7910)- EFFECT OF AND CANARD LOCATION AND GEOMETRY ON THE LONGITUDINAL AERODYNAMIC CHARACTERISTICS OF A CLOSE-COUPLED CANARD WING MODEL AT Unclas 1/02 23802 SUBSONIC SPEEDS (NASA) 86 pHC $.7,5 EFFECT OF WING PLANFORM AND CANARD LOCATION AND GEOMETRY ON THE LONGITUDINAL AERODYNAMIC CHARACTERISTICS OF A CLOSE-COUPLED CANARD WING MO[ AT SUBSONIC SPEEDS Blair B. Gloss C; .LT Langley Research Center 0T, Hampton, Va. 23665 16 .191 NATIONAL AERONAUTICS AND SPACE ADMINISTRATION * WASHINGTON,-D. * JUNE 1975 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. NASA TN D-7910 4. Title and Subtitle 5. Report Date EFFECT OF WING PLANFORM AND CANARD LOCATION June 1975 AND GEOMETRY ON THE LONGITUDINAL AERODYNAMIC CHARACTERISTICS OF A CLOSE-COUPLED CANARD WING MODEL AT SUBSONIC SPEEDS 7. Author(s) 8. Performing Organization Report No. L-9987 Blair B. Gloss 10. Work Unit No. 9. Performing Organization Name and Address 505-11-21-02 NASA Langley Research Center 11. Contract or Grant No. Hampton, Va. 23665 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Technical Note National Aeronautics and Space Administration 14. Sponsoring Agency Code Washington, D.C. 20546 15. Supplementary Notes 16. Abstract A generalized wind-tunnel model with canard and wing planforms typical of highly maneu- verable aircraft was tested in the Langley 7- by 10-foot high-speed tunnel at a Mach number of 0.30 to determine the effect of canard location, canard size, wing sweep, and canard strake on canard-wing interference to high angles of attack. -

Wind Tunnel Application of a Pressure-Sensitive Paint Technique to a Double Delta Wing Model at Subsonic and Transonic Speeds
NASA/TM-2006-214319 Wind Tunnel Application of a Pressure-Sensitive Paint Technique to a Double Delta Wing Model at Subsonic and Transonic Speeds Gary E. Erickson Langley Research Center, Hampton, Virginia Hugo A. Gonzalez Naval Air Systems Command, Patuxent River, Maryland May 2006 The NASA STI Program Office ... in Profile Since its founding, NASA has been dedicated to • CONFERENCE PUBLICATION. the advancement of aeronautics and space Collected papers from scientific and science. The NASA Scientific and Technical technical conferences, symposia, Information (STI) Program Office plays a key seminars, or other meetings sponsored or part in helping NASA maintain this important co-sponsored by NASA. role. • SPECIAL PUBLICATION. Scientific, The NASA STI Program Office is operated by technical, or historical information from Langley Research Center, the lead center for NASA programs, projects, and missions, NASA’s scientific and technical information. The often concerned with subjects having NASA STI Program Office provides access to the substantial public interest. NASA STI Database, the largest collection of aeronautical and space science STI in the world. • TECHNICAL TRANSLATION. English- The Program Office is also NASA’s institutional language translations of foreign scientific mechanism for disseminating the results of its and technical material pertinent to research and development activities. These results NASA’s mission. are published by NASA in the NASA STI Report Series, which includes the following report types: Specialized services that complement the STI Program Office’s diverse offerings include • TECHNICAL PUBLICATION. Reports of creating custom thesauri, building customized completed research or a major significant databases, organizing and publishing research phase of research that present the results of results ..