An Exploration of Moving Walkways As a Transport System in Urban Centers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Farragut North and Farragut West Pedestrian Passageway Tunnel Study
FARRAGUT NORTH AND FARRAGUT WEST PEDESTRIAN PASSAGEWAY TUNNEL STUDY Washington Metropolitan Area Transit Authority DEPARTMENT OF PLANNING AND STRATEGIC PROGRAMS OFFICE OF BUSINESS PLANNING AND PROJECT DEVELOPMENT (BPPD) August 23, 2004 Prepared By: Parsons KGP Design Studio Basile Baumann Prost & Associates Farragut North and Farragut West Pedestrian Passageway Tunnel TABLE OF CONTENTS I. INTRODUCTION and DESCRIPTION of PROJECT 5 II. PEDESTRIAN CONNECTION OPTIONS 6 A. Connections at Farragut West 6 B. Connections at Farragut North 7 C. Pedestrian Tunnel Options 7 1. Option 1 – Pedestrian Tunnel 8 2. Option 2 – Pedestrian Tunnel with Moving Walkway 8 3. Option 3 – Pedestrian Tunnel with Commercial Space 8 III. CODES and DATA 9 IV. BACKGROUND ANALYSIS and DECISION PROCESS 9 A. Initial Scope and Alternatives 9 1. Alternative 1: Pedestrian Tunnel to Existing Mezzanines in North and West 10 2. Alternative 2: Pedestrian Tunnel to South End of Farragut North and Existing Mezzanine at Farragut West 10 B. Entrances To the Tunnel 11 C. Farragut North – South Entrance to Platform Options, Alternative 2 and All Options 11 D. Farragut West – Station Entrance and Platform Elevators, All Alternatives and Options 12 E. Decision Process 12 V. STRUCTURAL FEATURES 13 A. Modification of Farragut North Station 13 B. Modification of Farragut West Station 15 C. Relocation of Vent Shaft at 17th Street 15 D. Tunnel Construction Method 16 E. Emergency Egress of Passageway 16 VI. MECHANICAL FEATURES A. General Mechanical Issues Common to All Options 17 1. Passageway Air Conditioning 17 2. Vent Shaft Relocation 18 3. Station Mechanical Room Modifications 18 4. Fire Protection 19 5. -

Rail and the City
RAIL AND THE CITY Shrinking Our Carbon Footprint while Reimagining Urban Space ROXANNE WARREN, AIA RAIL AND THE CITY • CLIMATE CHANGE, AND BENEFITS OF HIGH-DENSITIES • THE SPACE CONSUMED FOR CARS, AND SOLO DRIVING • DEVELOPMENT OVERBLOWN • DETERMINING NEEDS FOR RAIL INFRASTRUCTURE • THE UNIQUE FEATURES OF RAIL • HOW DID WE LOSE THESE VALUABLE ASSETS? • A MODEST CORRECTION TO GOVERNMENT POLICIES • REDESIGN OF TRAMS AS LIGHT RAIL, WORLDWIDE • INTERCITY RAIL IN THE US • HIGH-SPEED RAIL IN THE US, AND ENVISIONED WORLDWIDE • HIGH-SPEED RAIL POTENTIAL IN THE US • SHRINKING THE IMPACT OF ACCESS TO RAIL STATIONS CLIMATE CHANGE which is poised to inundate coastal cities with flooding worldwide – and must be our first concern – is integrally related to our reliance upon cars and planes, and its replication across the globe. • Emissions from transportation are the fastest growing source of greenhouse gases. If current population trends continue – by the year 2050, 2 to 3 billion cars may be on the world’s roads, compared with 800 million cars today – and emissions are expected to have increased by 300% percent. • Also by 2050, if current migratory trends continue, some 70% of humanity is likely to be living in cities. Besides the potential cultural benefits of city living, the likely ecological and economic benefits of more compact development are vast, and make great sense for a future of growing populations and scarcer resources. As densities of development are increased, significant savings per dwelling unit can be realized in the costs of land, utilities, construction materials, in the energy needed for space heating and cooling, and in the fuel, raw materials, and land consumed for transportation – not to mention, in the vital preservation of watersheds. -

Analysis of Moving Walkway Use in Airport Terminal Corridors
44 TRANSPORTATION RESEARCH RECORD 1506 Analysis of Moving Walkway Use in Airport Terminal Corridors SETH YOUNG This paper explores the use of pedestrian conveyor systems, otherwise those passengers carrying baggage, airports, in theory, are ideal known as moving walkways, in long public corridors such as those locations for moving walkways. found in major commercial airports. The investigation includes a brief Airport terminals have had a unique experience with passenger comparison of moving walkways with other primary modes of airport conveyor systems. Over the years, airports have acted as testing terminal passenger transportation and an empirical study of the use of moving walkways through analysis of passenger conveyors at the grounds for technological modifications to passenger conveyors. In United Airlines Terminal at San Francisco International Airport. The addition, airports have provided unique arenas for competition empirical study investigates the physical characteristics of several con between passenger conveyors and other passenger-mobility sys veyors and their locations within the airport terminal. The study also tems, such as electric courtesy carts, people movers, and buses. examines the passengers that traverse the corridors where the moving With each mode's inherent advantages and disadvantages, present walkways are located. Characteristics of the passengers, along with conveyor technology has found its niche within the airport terminal their "mode choice" of transport along the corridor were recorded. With these data, a brief examination of current passenger use is made, with environment. This paper will discuss briefly the characteristics that an emphasis on how travel speeds vary with each mode. In addition, have determined its current limited success and provide insight into implications are drawn concerning a passenger's mode choice, by how modifications to the passenger conveyor may result in success means of two discrete choice Logit models. -

Page. CLAIMS of the PRINCIPLE of RPTATION of TURBINE ONE
Page. CLAIMS OF THE PRINCIPLE OF RPTATION OF TURBINE ONE. What to claim is: 1. Rotation is obtained of the cross axial and axial bearing mounted turbine rotors, by shielding the returnblades partially or completely and uncovering the pushblades partially or completely. 2. Rotation of horizontal and vertical mounted rotor operable in bearings comprising at least three rotor blades radial and axially projecting its form expending from the hub. Cross-axial rotation of turbine rotors by means of shielding vane, or wind screen shielding the return blades partially or completely and uncovering the pushblades partially or completely for fluid to be channelled cross axially trough the intakes and impact coaxial and horizontally on the transverse projecting turbine rotor blades causing rotation of the prime mover, drivetrain by the converting kinetic energy into mechanical energy and into electric energy by means of a constant transmission turbine gearbox and lubricant system mechanical coupled in rotational mode with the electric generator rotor, comprising a cylindrical permanent or electromagnet coupled electrically to the exciter electrically connected with the disk magnet and axially opposing stator coils or disk or plates or massive electric conductive material disk or cylinder. 3. Rotation of the horizontal and vertical turbine rotor is obtained in clockwise direction and in counterclockwiswise direction. Generating AC current or dc current. Defines the rotor by at least two axial halves exposed axially for cross-axial flow axial flow and/or for perpendicularly flow turbine rotors. A left and right axial halve, or upper and lower axial halve which form the returnblades section and the pushblades intake and exhaust sections. -

2020 Weekly Planner : the Las Vegas Strip (1967): Vintage Topo Map Cover Pdf, Epub, Ebook
2020 WEEKLY PLANNER : THE LAS VEGAS STRIP (1967): VINTAGE TOPO MAP COVER PDF, EPUB, EBOOK Noon Sun Handy Books | 58 pages | 23 Feb 2019 | Amazon Digital Services LLC - Kdp Print Us | 9781797864778 | English | none 2020 Weekly Planner : The Las Vegas Strip (1967): Vintage Topo Map Cover PDF Book These maps should help you find your way around town. Atlanta Motor Speedway. Our Tools Compare two cities Use our city comparison tool to analyze and compare two cities. What items are prohibited inside the gates? Today the Neon Museum has a visitor center inside the retro lobby of the former La Concha Motel and a 2-acre display yard known as the Boneyard. Mesquite 4. This tool will help you find ideal meeting places between points, as well as the "travel radius" of a single point using different transportation modes. In its heyday, Atomic Liquors had a local clientele bolstered by regular visits from celebrities looking to avoid the attention they attracted on the Strip or Downtown Las Vegas. The Las Vegas Monorail operates along a 3. Assuming both cars consistently run their "Dialed-In" times every run, the Race is now won or lost based on the driver's reaction times! Take the escalator to the parking garage and follow the Monorail sign outside through the automatic doors. In most classes, a burnout precedes every run down the drag strip. Texas Motor Speedway. Retrieved December 28, What features are popular in which type of homes? Can I bring a cooler to the race? Las Vegas Free Maps! Fremont Casino :. If you want to get a feel for Old Las Vegas and the and the real roots of the city, you need to head Downtown to Fremont Street. -
Automated Train Brochure.Indd
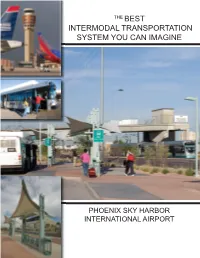
THE BEST INTERMODAL TRANSPORTATION SYSTEM YOU CAN IMAGINE PHOENIX SKY HARBOR INTERNATIONAL AIRPORT The Phoenix Sky Harbor International Airport Automated Train will provide an enhanced airport transportation system that will link the community and the airport facility - Phoenix Sky Harbor’s Automated Train System UPON COMPLETION: • Daily train ridership will be more than 96,000 passengers NOW • Airport Automated Train will create a Aviation Transit Center to METRO Light Rail direct link to the regional METRO light rail system • More than 100 buses will be 5 a eliminated from circulating the airport 6 3 and public roadways 3. 4 • Greenhouse gas emissions will be reduced by 5,500 tons • Create 5,900 jobs (Stage 1, see map on back) • Airport Automated Train is being designed to be sustainable and will be 2 one of the fi rst transit systems in the nation to be LEED certifi ed 1 Intermodal Transportation Center Site Plan INCLUDES: 1. METRO LIGHT RAIL 2. AVIATION TRANSIT CENTER 3. AIRPORT AUTOMATED TRAIN STATION 4. GROUND TRANSPORTATION 5. CELL PHONE WAITING LOT 6. FUTURE COMMUTER RAIL LINK Rendering of Enclosed Moving Walkway Connection Between METRO Light Rail and Airport Automated Train Station will link the community and the airport facility - Now and in the Future. Project Changes With $200 Million DOT Discretionary Funds • Provides train service to all three terminals Rendering of Future Airport Automated Train • Creates 1,000 more jobs Station at Intermodal Transportation Center 2013 • Eliminates 15% additional buses • Serves 10,000 additional -

TRANSPORT LONG ISLAND a Train-To-Plane Connectivity Study Cover Illustration by Alex J
TRANSPORT LONG ISLAND A Train-to-Plane Connectivity Study Cover Illustration by Alex J. Wallach, Suolk County EDP County Suolk Wallach, Alex J. by Illustration Cover May 2018 Appendices Transport Long Island: A Train-to-Plane Connectivity Study May 2018 Appendix A. Mode Book Appendix B. Existing Conditions and Connection Modes Identification Memo Appendix C. Project Screening Criteria Memo Appendix D. High-Level Implementation Plans Memo Appendix E. Public Information Session Materials Appendix F. Cost Estimate Classification and General Assumptions Appendix G. Key Reference Documents Appendix H. Environmental Review Effort Assessment References 57 Appendix A. Mode Book Upgraded Taxis Overview Upgraded fleet for-hire vehicles offer rides for individual passengers or small groups. Rides are summoned by hailing a taxi parked at a stand or driving by. Precedents Many airports around the country advertise taxi services that connect terminals with rail stations. Examples include Trenton-Mercer, Long Beach, Harrisburg, and New Haven. At MacArthur Airport Orientation to pick-up areas would be facilitated by signage at Ronkonkoma Station. Service awareness and convenience of transaction would be improved with updated LIRR ticket vending machines and app. New York City Hybrid Taxi, New York, NY (Image source: Karthik T J, Wikimedia) Upgraded Taxis Delivery Time Frame Taxis are the current mode of user selection of Ronkonkoma connection between Ronkonkoma as a destination. At Ronkonkoma < 2 years 2-5 years 5 years + Station and MacArthur Airport. Station, wayfinding and ease of Village Taxi drives LI MacArthur- orientation would be improved with Costs bound passengers from more conspicuous signage guiding Capital Expenditures Ronkonkoma Station for a flat fare to the taxi stand. -

TCQSM Part 8
Transit Capacity and Quality of Service Manual—2nd Edition PART 8 GLOSSARY This part of the manual presents definitions for the various transit terms discussed and referenced in the manual. Other important terms related to transit planning and operations are included so that this glossary can serve as a readily accessible and easily updated resource for transit applications beyond the evaluation of transit capacity and quality of service. As a result, this glossary includes local definitions and local terminology, even when these may be inconsistent with formal usage in the manual. Many systems have their own specific, historically derived, terminology: a motorman and guard on one system can be an operator and conductor on another. Modal definitions can be confusing. What is clearly light rail by definition may be termed streetcar, semi-metro, or rapid transit in a specific city. It is recommended that in these cases local usage should prevail. AADT — annual average daily ATP — automatic train protection. AADT—accessibility, transit traffic; see traffic, annual average ATS — automatic train supervision; daily. automatic train stop system. AAR — Association of ATU — Amalgamated Transit Union; see American Railroads; see union, transit. Aorganizations, Association of American Railroads. AVL — automatic vehicle location system. AASHTO — American Association of State AW0, AW1, AW2, AW3 — see car, weight Highway and Transportation Officials; see designations. organizations, American Association of State Highway and Transportation Officials. absolute block — see block, absolute. AAWDT — annual average weekday traffic; absolute permissive block — see block, see traffic, annual average weekday. absolute permissive. ABS — automatic block signal; see control acceleration — increase in velocity per unit system, automatic block signal. -

Helical Escalators and Moving Walkways
Helical Escalators and Moving Walkways Michel David Helixator Key Words: Helical Escalator, Moving Walkway, Technology, History, Design, Architecture. ABSTRACT Helical escalators and moving walkways have been on the minds of engineers for many years. This paper examines the history of these magnificent machines, the different attempts to build them and the numerous advantages their future brings. The paper reaches several conclusions; one of which is the description of a comprehensive solution for the realization of helical escalators and moving walkways of complex geometries. It describes the process of developing the Helixator technology using state of the art tools and software, and investigates the various possibilities emerging with its invention. The paper shows how this technology answers the current need of contemporary cities for better mobility, and suggests a new approach capable of significant shifts within the vertical transportation trends and industry. 1. HISTORY 1.1 Significant Helical Escalators The first helical escalator to be fully realized was build in 1906. Jesse Reno lead his “Reno Electric Stairways and Conveyors” company to build the machine for the opening of the Holloway Road station, London. The machine was built with two helices to carry passengers in both directions. It was an early "cleat-type" escalator where Passenger's feet tilted slightly upward. Erected in a disused elevator shaft, It was the first escalator ever built for public use in an underground station. Several thousand people rode the machine on the celebrated opening day. Unfortunately it was also the only day it operated. For safety reasons the machine was never certified for the public use. -

Passenger Rail
TRANSPORTATION SYSTEM PASSENGER RAIL SOUTHERN CALIFORNIA ASSOCIATION OF GOVERNMENTS TECHNICAL REPORT DRAFT FOR PUBLIC REVIEW AND COMMENT EXECUTIVE SUMMARY 1 INTRODUCTION 2 REGIONAL SIGNIFICANCE 2 REGULATORY FRAMEWORK 3 ANALYTICAL APPROACH 5 EXISTING CONDITIONS 6 STRATEGIES 27 NEXT STEPS 44 CONCLUSION 45 TECHNICAL REPORT PASSENGER RAIL DRAFT FOR PUBLIC REVIEW AND COMMENT connectsocal.org EXECUTIVE SUMMARY TRANSPORTATION SYSTEM This Connect SoCal Passenger Rail report lays out a vision of passenger rail services for the SCAG Region for the next three decades. It demonstrates Passenger Rail the progress that has been made over the last two decades in terms of growing ridership, new rail services, capital improvements and new funding opportunities. It demonstrates the regional importance and significance of passenger rail in the SCAG region, and why growing rail services by increasing frequencies in underserved corridors, as well as establishing service in unserved markets, is crucial to the future mobility and sustainability of our region. The report highlights recent success in establishing new funding opportunities for passenger rail, including the Transit and Intercity Rail Capital Program (TIRCP) and Senate Bill (SB) 1. Amtrak’s Pacific Surfliner intercity rail service is benefiting from these new funding opportunities as well as recent institutional arrangements that establish local control for the service. The Southern California Regional Rail Authority’s (SCRRA) Southern California Optimized Rail Expansion (SCORE) program is an ambitious -

Swissmetro: Economic Viability of the Basle-Zurich Pilot Line
Swissmetro: economic viability of the Basle-Zurich pilot line Michele Mossi, François Vuille GESTE Engineering SA Operational Management of the Swissmetro Project Scientific Park-C, 1015 Lausanne, Switzerland Phone: +41 21 693 8360, Fax: +41 21 693 8361, [email protected], www.geste.ch Keywords Basle-Zurich line, Economic evaluation, Pilot line, Swissmetro, Traffic analysis Abstract In the past two years, the management of the Swissmetro project has analysed the technical and economic feasibility of a high-speed connection between the centres of the Swiss cities Basle and Zurich. This 89.1 km long line, which could be in operation in 2020, will be ensured by a Swissmetro vehicle in only 15 minutes. In order to put out the economic viability of this connection, a traffic analysis has been conducted, yielding passenger estimates for the years 2020 to 2040. This analysis, based on four forecasting scenarios, showed that between 19,000 and 30,000 daily passengers would be conveyed on this line in 2020 and up to 85,600 by 2040. These traffic estimates have been used to determine the direct economic viability of the Basle-Zurich Swissmetro link. The connection will be profitable yielding a realistic internal rate of return ranging from 3.6% to 6.4%, depending on both the traffic scenario and the ticket price; this profitability would be largely increased if the Swissmetro line would also connect both Basle and Zurich airports, as well as other Swiss or European cities. 1 Introduction As already shown by several existing experiments with high-speed trains, implementing an efficient and fast transport system is an important issue for the development and inter-linkage of urban centres. -
Optimization of the Network Design of a Futuristic Transport System Based on Moving Walkways May 2014
Optimization of the network design of a futur- istic transport system based on moving walk- ways Riccardo Scarinci, Guillaume Lopez, Jianghang Chen, Michel Bier- laire Transport and Mobility Laboratory, EPFL May 2014 Optimization of the network design of a futuristic transport system based on moving walkways May 2014 Transport and Mobility Laboratory, EPFL Optimization of the network design of a futuristic trans- port system based on moving walkways Riccardo Scarinci, Guillaume Lopez, Jianghang Chen, Michel Bierlaire, School of Architecture, Civil and Environmental Engineering (ENAC) Transport and Mobility Laboratory (TRANSP-OR) École Polytechnique Fédérale de Lausanne (EPFL), Lausanne, Switzerland phone: +41 (0) 21 693 24 08 fax: +41 (0) 21 693 80 60 {riccardo.scarinci,guillaume.lopez,jianghang.chen,michel.bierlaire}@epfl.ch May 2014 Abstract Starting from the assumption of a future where the use of cars will be limited in dense urban areas, and thus streets could be used for innovative transport modes, this project investigates a system based on accelerated moving walkways (AMW). Differently from constant moving walkways, AMW can reach speeds up to 15km/h thanks to an acceleration section. This paper, after a review of existing AMW implementations, presents a description of this system and formulates an optimization problem to identify the optimal design of a network of AMW. Decision variables and parameters are defined for a general scenario, and five criteria are considered for the formulation of the objective function: travel time, discomfort, energy consumption, construction cost and operational cost. The resulting multi-objective mixed integer nonlinear optimization problem is evaluated for the simple case of a single link, and results of optimal speed profiles for different parameter values are presented.