Digital Camera Identification from Sensor Pattern Noise
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Megaplus Conversion Lenses for Digital Cameras
Section2 PHOTO - VIDEO - PRO AUDIO Accessories LCD Accessories .......................244-245 Batteries.....................................246-249 Camera Brackets ......................250-253 Flashes........................................253-259 Accessory Lenses .....................260-265 VR Tools.....................................266-271 Digital Media & Peripherals ..272-279 Portable Media Storage ..........280-285 Digital Picture Frames....................286 Imaging Systems ..............................287 Tripods and Heads ..................288-301 Camera Cases............................302-321 Underwater Equipment ..........322-327 PHOTOGRAPHIC SOLUTIONS DIGITAL CAMERA CLEANING PRODUCTS Sensor Swab — Digital Imaging Chip Cleaner HAKUBA Sensor Swabs are designed for cleaning the CLEANING PRODUCTS imaging sensor (CMOS or CCD) on SLR digital cameras and other delicate or hard to reach optical and imaging sur- faces. Clean room manufactured KMC-05 and sealed, these swabs are the ultimate Lens Cleaning Kit in purity. Recommended by Kodak and Fuji (when Includes: Lens tissue (30 used with Eclipse Lens Cleaner) for cleaning the DSC Pro 14n pcs.), Cleaning Solution 30 cc and FinePix S1/S2 Pro. #HALCK .........................3.95 Sensor Swabs for Digital SLR Cameras: 12-Pack (PHSS12) ........45.95 KA-11 Lens Cleaning Set Includes a Blower Brush,Cleaning Solution 30cc, Lens ECLIPSE Tissue Cleaning Cloth. CAMERA ACCESSORIES #HALCS ...................................................................................4.95 ECLIPSE lens cleaner is the highest purity lens cleaner available. It dries as quickly as it can LCDCK-BL Digital Cleaning Kit be applied leaving absolutely no residue. For cleaing LCD screens and other optical surfaces. ECLIPSE is the recommended optical glass Includes dual function cleaning tool that has a lens brush on one side and a cleaning chamois on the other, cleaner for THK USA, the US distributor for cleaning solution and five replacement chamois with one 244 Hoya filters and Tokina lenses. -
Cameras • Video Camera
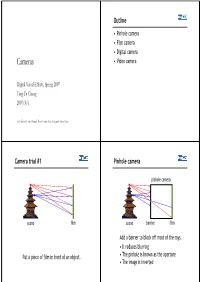
Outline • Pinhole camera •Film camera • Digital camera Cameras • Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 Pinhole camera pinhole camera scene film scene barrier film Add a barrier to block off most of the rays. • It reduces blurring Put a piece of film in front of an object. • The pinhole is known as the aperture • The image is inverted Shrinking the aperture Shrinking the aperture Why not making the aperture as small as possible? • Less light gets through • Diffraction effect High-end commercial pinhole cameras Adding a lens “circle of confusion” scene lens film A lens focuses light onto the film $200~$700 • There is a specific distance at which objects are “in focus” • other points project to a “circle of confusion” in the image Lenses Exposure = aperture + shutter speed F Thin lens equation: • Aperture of diameter D restricts the range of rays (aperture may be on either side of the lens) • Any object point satisfying this equation is in focus • Shutter speed is the amount of time that light is • Thin lens applet: allowed to pass through the aperture http://www.phy.ntnu.edu.tw/java/Lens/lens_e.html Exposure Effects of shutter speeds • Two main parameters: • Slower shutter speed => more light, but more motion blur – Aperture (in f stop) – Shutter speed (in fraction of a second) • Faster shutter speed freezes motion Aperture Depth of field • Aperture is the diameter of the lens opening, usually specified by f-stop, f/D, a fraction of the focal length. -

About Introduction
ABOUT TRIPOD, HEAD AND VIBRATION MARCH 2005 PAGE 1 OF 24 ABOUT This article is an update of my previous writing about vibration in camera support. Even with some decades of advancement in camera technologies, stable support with tripod is the most promis- ing way to get a sharper picture. Even with fancy control algorithms for vibration reduction, using tripod is the only practical solution that gives us freedom in photography. True understanding is about a different manner of doing something. When you understand how much you lose by not using tripod, you may not be able to make a single shot without one. It was first published in January 2004 and this is the 4th major revision. [Testing tripod-head vibration at the Markins office using Nikon D2H, laser vibrometer and data acquisition system] March 2005 at Boston, Charlie Kim INTRODUCTION I begin this article showing two most common and well known examples of camera related vibrations. One is about MLU (Mirror Lock Up Function) and the other is about the need for a higher shutter speed. Mirror Lock Up Mirror and shutter are the main moving parts inside the camera. If there is no external vibration, those are the only source of camera vibration. The vibration caused by mirror collision is quite big in most cameras.1 Follow- ing graphs suggest how much the vibrations caused by it would be. 1 John Shaw said that the camera without MLU is not a camera. ABOUT TRIPOD, HEAD AND VIBRATION MARCH 2005 PAGE 2 OF 24 For this measurement Hasselblad 205FCC with standard 80mm lens was used.2 mirror up 40 40 1st curtain stop 1st curtain stop 2nd curtain stop 20 35.4um 2nd curtain stop 20 5.1um 0 0 -20 -20 1/8 sec mirror down 1/8 sec VIBRATION AMPLITUDE [um] VIBRATION AMPLITUDE[um] -40 -40 mirror down 0.1 0.2 0.3 0.4 0.5 0.0 0.1 0.2 0.3 0.4 TIME IN SECOND TIME IN SECOND You can see the start and stop signs of every event. -
User's Manual
C22EN0391 E ENGLISH Digital Single Lens Reflex Camera USER’S MANUAL This manual explains how to use SIGMA SD10 digital SLR camera. Please refer to the SIGMA Photo Pro User Guide, which is available in the PDF format of the supplied CD-ROM, to get information about installation of SIGMA Photo Pro software to your computer, connection between camera and computer and for detailed explanation of SIGMA Photo Pro software. 115 Thank you for purchasing the Sigma Digital Autofocus Camera The Sigma SD10 Digital SLR camera is a technical breakthrough! It is powered by the Foveon® X3™ image sensor, the world’s first image sensor to capture red, green and blue light at each and every pixel. A high-resolution digital single-lens reflex camera, the SD10 delivers superior-quality digital images by combining Sigma’s extensive interchangeable lens line-up with the revolutionary Foveon X3 image sensor. You will get the greatest performance and enjoyment from your new SD10 camera’s features by reading this instruction manual carefully before operating it. Enjoy your new Sigma camera! SPECIAL FEATURES OF THE SD10 ■ Powered by Foveon X3 technology. ■ Uses a lossless compression RAW data format to eliminate image deterioration, giving superior pictures without sacrificing original image quality. ■ "Sports finder" covers action outside the immediate frame. ■ Dust protector keeps dust from adhering to the image sensor. ■ Mirror-up mechanism and depth-of-field preview button support advanced photography techniques. • Please keep this instruction booklet handy for future reference. Doing so will allow you to understand and take advantage of the camera’s unique features at any time. -
Computer Vision, CS766
Announcement • A total of 5 (five) late days are allowed for projects. • Office hours – Me: 3:50-4:50pm Thursday (or by appointment) – Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film Alexei Efros’ slide The Eye Image Formation • Let’s design a camera – Idea 1: put a piece of film in front of an object – Do we get a reasonable image? Steve Seitz’s slide Pinhole Camera • Add a barrier to block off most of the rays – This reduces blurring – The opening known as the aperture – How does this transform the image? Steve Seitz’s slide Camera Obscura • The first camera – 5th B.C. Aristotle, Mozi (Chinese: 墨子) – How does the aperture size affect the image? http://en.wikipedia.org/wiki/Pinhole_camera Shrinking the aperture • Why not make the aperture as small as possible? – Less light gets through – Diffraction effects... Shrinking the aperture Shrinking the aperture Sharpest image is obtained when: d 2 f d is diameter, f is distance from hole to film λ is the wavelength of light, all given in metres. Example: If f = 50mm, λ = 600nm (red), d = 0.36mm Srinivasa Narasimhan’s slide Pinhole cameras are popular Jerry Vincent's Pinhole Camera Impressive Images Jerry Vincent's Pinhole Photos What’s wrong with Pinhole Cameras? • Low incoming light => Long exposure time => Tripod KODAK Film or Paper Bright Sun Cloudy Bright TRI-X Pan 1 or 2 seconds 4 to 8 seconds T-MAX 100 Film 2 to 4 seconds 8 to 16 seconds KODABROMIDE Paper, F2 2 minutes 8 minutes http://www.kodak.com/global/en/consumer/education/lessonPlans/pinholeCamera/pinholeCanBox.shtml What’s wrong with Pinhole Cameras People are ghosted What’s wrong with Pinhole Cameras People become ghosts! Pinhole Camera Recap • Pinhole size (aperture) must be “very small” to obtain a clear image. -

Thank You for Purchasing the Sigma Digital Autofocus Camera
Thank you for purchasing the Sigma Digital Autofocus Camera The Sigma SD14 Digital SLR camera is a technical breakthrough! It is powered by the Foveon® X3™ image sensor, the world’s first image sensor to capture red, green and blue light at each and every pixel. A high-resolution digital single-lens reflex camera, the SD14 delivers superior-quality digital images by combining Sigma’s extensive interchangeable lens line-up with the revolutionary Foveon X3 image sensor. You will get the greatest performance and enjoyment from your new SD14 camera’s features by reading this instruction manual carefully before operating it. Enjoy your new Sigma camera! SPECIAL FEATURES OF THE SD14 ■ Powered by Foveon X3 technology. ■ In addition to RAW format data recording system, this camera also incorporates easy to use and high quality JPEG recording format. Super high quality JPEG format recording mode makes the best use of the characteristic of FOVEON® X3TM image sensor. ■ Dust protector keeps dust from entering the camera and adhering to the image sensor. ■ Mirror-up mechanism and depth-of-field preview button support advanced photography techniques. • Please keep this instruction booklet handy for future reference. Doing so will allow you to understand and take advantage of the camera’s unique features at any time. • The warranty of this product is one year from the date of purchase. Warranty terms and warranty card are on a separate sheet, attached. Please refer to these materials for details. Disposal of Electric and Electronic Equipment in Private Households Disposal of used Electrical & Electronic Equipment (Applicable in the European Union and other European countries with separate collection systems) This symbol indicates that this product shall not be treated as household waste. -

2006 SPIE Invited Paper: a Brief History of 'Pixel'
REPRINT — author contact: <[email protected]> A Brief History of ‘Pixel’ Richard F. Lyon Foveon Inc., 2820 San Tomas Expressway, Santa Clara CA 95051 ABSTRACT The term pixel, for picture element, was first published in two different SPIE Proceedings in 1965, in articles by Fred C. Billingsley of Caltech’s Jet Propulsion Laboratory. The alternative pel was published by William F. Schreiber of MIT in the Proceedings of the IEEE in 1967. Both pixel and pel were propagated within the image processing and video coding field for more than a decade before they appeared in textbooks in the late 1970s. Subsequently, pixel has become ubiquitous in the fields of computer graphics, displays, printers, scanners, cameras, and related technologies, with a variety of sometimes conflicting meanings. Reprint — Paper EI 6069-1 Digital Photography II — Invited Paper IS&T/SPIE Symposium on Electronic Imaging 15–19 January 2006, San Jose, California, USA Copyright 2006 SPIE and IS&T. This paper has been published in Digital Photography II, IS&T/SPIE Symposium on Electronic Imaging, 15–19 January 2006, San Jose, California, USA, and is made available as an electronic reprint with permission of SPIE and IS&T. One print or electronic copy may be made for personal use only. Systematic or multiple reproduction, distribution to multiple locations via electronic or other means, duplication of any material in this paper for a fee or for commercial purposes, or modification of the content of the paper are prohibited. A Brief History of ‘Pixel’ Richard F. Lyon Foveon Inc., 2820 San Tomas Expressway, Santa Clara CA 95051 ABSTRACT The term pixel, for picture element, was first published in two different SPIE Proceedings in 1965, in articles by Fred C. -
Announcement • a Total of 5 (Five) Late Days Are Allowed for Projects. Image Formation
Announcement • A total of 5 (five) late days are allowed for projects. Image Formation Digital Camera Film Alexei Efros’ slide The Eye Image Formation film • Let’s design a camera – Idea 1: put a piece of film in front of an object Do we get a reasonable image? Steve Seitz’s slide Pinhole Camera barrier film • Add a barrier to block off most of the rays – This reduces blurring – The opening known as the aperture – How does this transform the image? Steve Seitz’s slide Camera Obscura • The first camera – 5th B.C. Aristotle, Mozi (Chinese: 墨子) – How does the aperture size affect the image? http://en.wikipedia.org/wiki/Pinhole_camera Shrinking the aperture • Why not make the aperture as small as possible? – Less light gets through – Diffraction effects... Shrinking the aperture Shrinking the aperture Sharpest image is obtained when: d = 2 f λ d is diameter, f is distance from hole to film λ is the wavelength of light, all given in metres. Example: If f = 50mm, λ = 600nm (red), d = 0.36mm Srinivasa Narasimhan’s slide Pinhole cameras are popular Jerry Vincent's Pinhole Camera Impressive Images Jerry Vincent's Pinhole Photos What’s wrong with Pinhole Cameras? • Low incoming light => Long exposure time => Tripod KODAK Film or Paper Bright Sun Cloudy Bright TRI-X Pan 1 or 2 seconds 4 to 8 seconds T-MAX 100 Film 2 to 4 seconds 8 to 16 seconds KODABROMIDE Paper, F2 2 minutes 8 minutes http://www.kodak.com/global/en/consumer/education/lessonPlans/pinholeCamera/pinholeCanBox.shtml What’s wrong with Pinhole Cameras People are ghosted What’s wrong with Pinhole Cameras People become ghosts! Pinhole Camera Recap • Pinhole size (aperture) must be “very small” to obtain a clear image. -
How Digital Cameras Capture Light
1 Open Your Shutters How Digital Cameras Capture Light Avery CirincioneLynch Eighth Grade Project Paper Hilltown Cooperative Charter School June 2014 2 Cover image courtesy of tumblr.com How Can I Develop This: Introduction Imagine you are walking into a dark room; at first you can't see anything, but as your pupils begin to dilate, you can start to see the details and colors of the room. Now imagine you are holding a film camera in a field of flowers on a sunny day; you focus on a beautiful flower and snap a picture. Once you develop it, it comes out just how you wanted it to so you hang it on your wall. Lastly, imagine you are standing over that same flower, but, this time after snapping the photograph, instead of having to developing it, you can just download it to a computer and print it out. All three of these scenarios are examples of capturing light. Our eyes use an optic nerve in the back of the eye that converts the image it senses into a set of electric signals and transmits it to the brain (Wikipedia, Eye). Film cameras use film; once the image is projected through the lens and on to the film, a chemical reaction occurs recording the light. Digital cameras use electronic sensors in the back of the camera to capture the light. Currently, there are two main types of sensors used for digital photography: the chargecoupled device (CCD) and complementary metaloxide semiconductor (CMOS) sensors. Both of these methods convert the intensity of the light at each pixel into binary form, so the picture can be displayed and saved as a digital file (Wikipedia, Image Sensor). -

ଐ ஜ ᛖ ENGLISH DEUTSCH FRANÇAIS NEDERLANDS ESPAÑOL ITALIANO Ɯʒƨƽƹŵƿǰȟȭȳǻǜɠᝰƍ൭njƍƨʃɩƌǔƕʊəɲɵƍljƣŵஜᛟଢ Thank You Very Much for Purchasing a Sigma Lens
ଐ ஜ ᛖ ENGLISH DEUTSCH FRANÇAIS NEDERLANDS ESPAÑOL ITALIANO ƜƷƨƼƸŴǷǰȞȬȳǺǛƓᝰƍ൭NJƍƨƩƖƋǓƕƱƏƝƟƍLJƢŵஜᛟଢ Thank you very much for purchasing a Sigma Lens. In order to get the Wir danken Ihnen für das Vertrauen, das Sie uns mit dem Kauf dieses Nous vous remercions d’avoir choisi un objectif SIGMA. Pour en tirer le Wij stellen het op prijs dat u een Sigma objectief heeft aangeschaft. Teneinde Le agradecemos la compra de este objetivo Sigma. Para conseguir los Vi ringraziamo della preferenza accordataci con l’acquisto del vostro nuovo ǛƝችᛠƷɥŴȬȳǺƷೞᏡŴદ˺ŴӕǓৢƍɥƷදॖໜǛദƠƘྸᚐƠƯŴ maximum performance and enjoyment out of your Sigma lens, please read SIGMA Produktes erwiesen haben. Bitte lesen Sie sich diese Anleitung vor meilleur profit et le plus grand plaisir, nous vous conseillons de lire maximaal profijt en plezier van uw Sigma objectief te hebben, adviseren wij u mejores resultados de su objetivo lea atentamente este manual de obiettivo Sigma. Vi raccomandiamo di leggere attentamente le presenti ϙჇજࢨǛƓಏƠLjƘƩƞƍŵƳƓஜᛟଢƸŴӲǫȡȩဇσဇƱƳƬƯƓǓLJ this instruction booklet thoroughly before you start to use the lens. der ersten Benutzung des Gerätes aufmerksam durch. attentivement le mode d’emploi avant toute utilisation. deze gebruiksaanwijzing geheel door te lezen alvorens u het objectief gaat instrucciones antes de utilizarlo. istruzioni prima di cominciare a usarlo. Conoscendolo meglio, vi sarà facile ƢƷưŴႸƴǑǓƝ̅ဇǫȡȩƷᛆ࢘ሖǛƓᛠLjƴƳǓŴƝ̅ဇǫȡȩƷᛟ gebruiken. ottenerne le migliori prestazioni e soddisfazioni. DESCRIPTION OF THE PARTS (fig.1) BESCHREIBURUNG DER TEILE (Abb.1) DESCRIPTION DES ELEMENTS (Fig.1) DESCRIPCION DE LOS COMPONENTES (fig.1) Џƴ̬ሥƠƯƘƩƞƍŵ 1. Adapterring 5. BrennweitenringٻଢNjƋǘƤƯƝᚁƘƩƞƍŵƓᛠLjƴƳƬƨƋƱƸŴ 1. Adapter Ring 5. Zoom Ring 1. Porte-bouchon 5. Bague de zoom BESCHRIJVING VAN DE ONDERDELEN (fig.1) 1. -

SIGMA/SD9/French/Ver.4.1
Boîtier reflex numérique Principales Principales caractéristiques du SIGMA SD9 Support d'enregistrement CompactFlash™ (CF) (TypeI/II), IBM Microdrive Taille du capteur 20,7mm x 13,8mm Monture d'objectif Objectifs à monture Sigma SA Angle de champ Equivalent à 1,7x la longueur focale de l'objectif au format 135mm Objectifs compatibles Baïonnette SA Capteur Foveon® X3™ (CMOS) La capture haute définition de plus Nombre de pixel saisis 10,28 Millions (2 268 colonnes x 1 512 lignes x 3 couches) de 10,2 millions de pixels Ratio d'image 3:2 Format d'enregistrement Compression sans perte de format natif RAW (12bit) Taille de fichiers HI (haute) : 2 268 x 1 512 x 3 (Approx. 8MB), MED (moyenne) : 1 512 x 1 008 x 3 Approx 4MB), LOW (basse) : 1 134 x 756 x 3 (Approx 2MB) Vitesse de prise de vue en rafale HI : 1,9 images/seconde, MED : 2,4 images/seconde , LOW : 2,5 images/seconde Nombre de vues maximal HI : 6 vues, MED : 14 vues, LOW : 30 vues en continu Interfaces IEEE1394, USB (1.1), Sortie Vidéo (NTSC/PAL) Balance des blancs 8 types (Auto, Soleil, Ombre, Couvert, Incandescent, Fluorescent, Flash, Personnalisée) Viseur Viseur reflex par Pentaprisme Couverture du viseur 97% vertical, 98% horizontal Grandissement 0,77x (50mm F1,4 — ) Dégagement 18mm Correcteur dioptrique -3dpt — +1dpt Type d autofocus Système par détection de différence de phase TTL Sensibilité AF IL2 — 18 (100 ISO) Modes AF AF-S (spot), AF-C (continu), avec AF prédictif Systèmes de mesure Mesure évaluative sur 8 segments, Mesure Centrale, Mesure moyenne pondérée centrale Sensibilité de mesure IL1 — 20 (50mm F1,4: 100 ISO) Modes d'exposition (P) Programme Auto décalable (S) Priorité Vitesse (A) Priorité Diaphragme, (M) Manuel Sensibilité ISO Equivalence ISO 100, 200, 400 Correction d'exposition ±3IL (par _ incréments) Mémorisation d'exposition par bouton (paramètres d'exposition bloqués avec touche enfoncée) Auto Bracketing Sur trois niveaux : Approprié, sous exposition, surexposition. -

Branding Für Porträt
PHOTO PRESSE DAS INSIDERMAGAZIN FÜR ERFOLGREICHES FOTOBUSINESS 525–0 –2017 PP07 SEIT 1945 BUSINESS MARKE ICH INTERVIEW FOTOGRAFIE EXPERTEN-TIPPS: BRANDING IST DAS KUNST? WIE SIE MIT SCHAUSPIELER MATTHIAS DIE MALERISCHEN BILDER FÜR PORTRÄT- UND HOCH- DER EIGENEN AUSSTELLUNG MATSCHKE ÜBER SEINE VON INES MONDON UND ZEITSFOTOGRAFEN IHR PROFIL SCHÄRFEN FOTOLEIDENSCHAFT MARK JAMES FORD S igma × PHOTO PRESSE FÜR DIE FARBEN DER NATUR Ines Mondon und Mark James Ford sind leidenschaftliche Naturfotografen. Farbwiedergabe und Detailreichtum zählen für sie zu den wichtigsten gestalterischen Elementen ihrer Bilder. Genau aus diesem Grund setzen beide auf Sigmas FoveonSensortechnologie. T – Florian Sturm F – Ines Mondon, Mark James Ford icht die Kamera macht das Bild, sondern der Mensch, der N sie bedient. Jeder Fotograf hat diesen Satz schon viel zu oft in seiner Karriere gehört (und vermutlich auch irgendwann selbst gesagt). Die These ist zweifelsohne richtig, doch bekanntlich hat jede Regel ihre Ausnahmen. Bezo- gen auf die digitalen Kameras sind das in diesem Fall die Modelle des japanischen Herstellers Sigma. Den meisten Fotoenthusiasten ist das Unternehmen für seine hochwertigen Objektive bekannt; allerdings fertigen die Japaner seit über vierzig Jahren auch Kameras. Premierenstück war 1976 die Sigma Mark I, eine analoge SLR mit M42-Bajonett; 2002 folgte mit der SD-9 die erste in der postanalogen Ära. Und genau deren Herzstück – der Foveon X3-Sensor – ist es, das dank einzigarti- gem Design die Farbaufnahmen aus digi- 01 talen Sigma-Kameras zu etwas Besonde- 36 PHOTO PRESSE 07-17 F – INES (2) MONDON – F 02 PHOTO PRESSE 07-17 37 03 rem macht. Das finden auch Ines Mondon fen auf Sigma-Kameras aufmerksam.