New Dimensions in Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 13 the Geometry of Circles
Chapter 13 TheR. Connelly geometry of circles Math 452, Spring 2002 Math 4520, Fall 2017 CLASSICAL GEOMETRIES So far we have been studying lines and conics in the Euclidean plane. What about circles, 14. The geometry of circles one of the basic objects of study in Euclidean geometry? One approach is to use the complex numbersSo far .we Recall have thatbeen the studying projectivities lines and of conics the projective in the Euclidean plane overplane., whichWhat weabout call 2, circles, Cone of the basic objects of study in Euclidean geometry? One approachC is to use CP are given by 3 by 3 matrices, and these projectivities restricted to a complex projective the complex numbers 1C. Recall that the projectivities of the projective plane over C, line,v.rhich which we wecall call Cp2, a CPare, given are the by Moebius3 by 3 matrices, functions, and whichthese projectivities themselves correspondrestricted to to a 2-by-2 matrices.complex Theprojective Moebius line, functions which we preservecall a Cpl the, are cross the Moebius ratio. This functions, is where which circles themselves come in. correspond to a 2 by 2 matrix. The Moebius functions preserve the cross ratio. This is 13.1where circles The come cross in. ratio for the complex field We14.1 look The for anothercross ratio geometric for the interpretation complex field of the cross ratio for the complex field, or better 1 yet forWeCP look= Cfor[f1g another. Recall geometric the polarinterpretation decomposition of the cross of a complexratio for numberthe complexz = refield,iθ, where r =orjz betterj is the yet magnitude for Cpl = ofCz U, and{ 00 } .Recallθ is the the angle polar that decomposition the line through of a complex 0 and znumbermakes with thez real -rei9, axis. -

History of Mathematics
Georgia Department of Education History of Mathematics K-12 Mathematics Introduction The Georgia Mathematics Curriculum focuses on actively engaging the students in the development of mathematical understanding by using manipulatives and a variety of representations, working independently and cooperatively to solve problems, estimating and computing efficiently, and conducting investigations and recording findings. There is a shift towards applying mathematical concepts and skills in the context of authentic problems and for the student to understand concepts rather than merely follow a sequence of procedures. In mathematics classrooms, students will learn to think critically in a mathematical way with an understanding that there are many different ways to a solution and sometimes more than one right answer in applied mathematics. Mathematics is the economy of information. The central idea of all mathematics is to discover how knowing some things well, via reasoning, permit students to know much else—without having to commit the information to memory as a separate fact. It is the reasoned, logical connections that make mathematics coherent. The implementation of the Georgia Standards of Excellence in Mathematics places a greater emphasis on sense making, problem solving, reasoning, representation, connections, and communication. History of Mathematics History of Mathematics is a one-semester elective course option for students who have completed AP Calculus or are taking AP Calculus concurrently. It traces the development of major branches of mathematics throughout history, specifically algebra, geometry, number theory, and methods of proofs, how that development was influenced by the needs of various cultures, and how the mathematics in turn influenced culture. The course extends the numbers and counting, algebra, geometry, and data analysis and probability strands from previous courses, and includes a new history strand. -

20. Geometry of the Circle (SC)
20. GEOMETRY OF THE CIRCLE PARTS OF THE CIRCLE Segments When we speak of a circle we may be referring to the plane figure itself or the boundary of the shape, called the circumference. In solving problems involving the circle, we must be familiar with several theorems. In order to understand these theorems, we review the names given to parts of a circle. Diameter and chord The region that is encompassed between an arc and a chord is called a segment. The region between the chord and the minor arc is called the minor segment. The region between the chord and the major arc is called the major segment. If the chord is a diameter, then both segments are equal and are called semi-circles. The straight line joining any two points on the circle is called a chord. Sectors A diameter is a chord that passes through the center of the circle. It is, therefore, the longest possible chord of a circle. In the diagram, O is the center of the circle, AB is a diameter and PQ is also a chord. Arcs The region that is enclosed by any two radii and an arc is called a sector. If the region is bounded by the two radii and a minor arc, then it is called the minor sector. www.faspassmaths.comIf the region is bounded by two radii and the major arc, it is called the major sector. An arc of a circle is the part of the circumference of the circle that is cut off by a chord. -

Geometry Course Outline
GEOMETRY COURSE OUTLINE Content Area Formative Assessment # of Lessons Days G0 INTRO AND CONSTRUCTION 12 G-CO Congruence 12, 13 G1 BASIC DEFINITIONS AND RIGID MOTION Representing and 20 G-CO Congruence 1, 2, 3, 4, 5, 6, 7, 8 Combining Transformations Analyzing Congruency Proofs G2 GEOMETRIC RELATIONSHIPS AND PROPERTIES Evaluating Statements 15 G-CO Congruence 9, 10, 11 About Length and Area G-C Circles 3 Inscribing and Circumscribing Right Triangles G3 SIMILARITY Geometry Problems: 20 G-SRT Similarity, Right Triangles, and Trigonometry 1, 2, 3, Circles and Triangles 4, 5 Proofs of the Pythagorean Theorem M1 GEOMETRIC MODELING 1 Solving Geometry 7 G-MG Modeling with Geometry 1, 2, 3 Problems: Floodlights G4 COORDINATE GEOMETRY Finding Equations of 15 G-GPE Expressing Geometric Properties with Equations 4, 5, Parallel and 6, 7 Perpendicular Lines G5 CIRCLES AND CONICS Equations of Circles 1 15 G-C Circles 1, 2, 5 Equations of Circles 2 G-GPE Expressing Geometric Properties with Equations 1, 2 Sectors of Circles G6 GEOMETRIC MEASUREMENTS AND DIMENSIONS Evaluating Statements 15 G-GMD 1, 3, 4 About Enlargements (2D & 3D) 2D Representations of 3D Objects G7 TRIONOMETRIC RATIOS Calculating Volumes of 15 G-SRT Similarity, Right Triangles, and Trigonometry 6, 7, 8 Compound Objects M2 GEOMETRIC MODELING 2 Modeling: Rolling Cups 10 G-MG Modeling with Geometry 1, 2, 3 TOTAL: 144 HIGH SCHOOL OVERVIEW Algebra 1 Geometry Algebra 2 A0 Introduction G0 Introduction and A0 Introduction Construction A1 Modeling With Functions G1 Basic Definitions and Rigid -
Dimension Guide
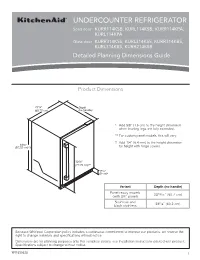
UNDERCOUNTER REFRIGERATOR Solid door KURR114KSB, KURL114KSB, KURR114KPA, KURL114KPA Glass door KURR314KSS, KURL314KSS, KURR314KBS, KURL314KBS, KURR214KSB Detailed Planning Dimensions Guide Product Dimensions 237/8” Depth (60.72 cm) (no handle) * Add 5/8” (1.6 cm) to the height dimension when leveling legs are fully extended. ** For custom panel models, this will vary. † Add 1/4” (6.4 mm) to the height dimension 343/8” (87.32 cm)*† for height with hinge covers. 305/8” (77.75 cm)** 39/16” (9 cm)* Variant Depth (no handle) Panel ready models 2313/16” (60.7 cm) (with 3/4” panel) Stainless and 235/8” (60.2 cm) black stainless Because Whirlpool Corporation policy includes a continuous commitment to improve our products, we reserve the right to change materials and specifications without notice. Dimensions are for planning purposes only. For complete details, see Installation Instructions packed with product. Specifications subject to change without notice. W11530525 1 Panel ready models Stainless and black Dimension Description (with 3/4” panel) stainless models A Width of door 233/4” (60.3 cm) 233/4” (60.3 cm) B Width of the grille 2313/16” (60.5 cm) 2313/16” (60.5 cm) C Height to top of handle ** 311/8” (78.85 cm) Width from side of refrigerator to 1 D handle – door open 90° ** 2 /3” (5.95 cm) E Depth without door 2111/16” (55.1 cm) 2111/16” (55.1 cm) F Depth with door 2313/16” (60.7 cm) 235/8” (60.2 cm) 7 G Depth with handle ** 26 /16” (67.15 cm) H Depth with door open 90° 4715/16” (121.8 cm) 4715/16” (121.8 cm) **For custom panel models, this will vary. -

ROBERT L. FOOTE CURRICULUM VITA March 2017 Address
ROBERT L. FOOTE CURRICULUM VITA March 2017 Address/Telephone/E-Mail Department of Mathematics & Computer Science Wabash College Crawfordsville, Indiana 47933 (765) 361-6429 [email protected] Personal Date of Birth: December 2, 1953 Citizenship: USA Education Ph.D., Mathematics, University of Michigan, April 1983 Dissertation: Curvature Estimates for Monge-Amp`ere Foliations Thesis Advisor: Daniel M. Burns Jr. M.A., Mathematics, University of Michigan, April 1978 B.A., Mathematics, Kalamazoo College, June 1976 Magna cum Laude with Honors in Mathematics, Phi Beta Kappa, Heyl Science Scholarship Employment 1989–present, Wabash College Department Chair, 1997–2001, 2009–2012 Full Professor since 2004 Associate Professor, 1993–2004 Assistant Professor, 1991–1993 Byron K. Trippet Assistant Professor, 1989–1991 1983–1989, Texas Tech University, Assistant Professor (granted tenure) 1983, Kalamazoo College, Visiting Instructor 1976–1982, University of Michigan, Graduate Student Teaching Assistant 1976, 1977, The Upjohn Company, Mathematical Analyst Research Visits 2009, Korea Institute for Advanced Study (KIAS), Visiting Scholar Three weeks at the invitation of C. K. Han. 2009, Pennsylvania State Univ., Shapiro Visitor Four weeks at the invitation of Sergei Tabachnikov. 2008–2009, Univ. of Georgia, Visiting Scholar (sabbatical leave) 1996–1997, 2003–2004, Univ. of Illinois at Urbana Champaign, Visiting Scholar (sabbatical leave) 1991, Pohang Institute of Science and Technology, Pohang, Korea Three months at the invitation of C. K. Han. 1990, Texas Tech University Ten weeks at the invitation of Lance D. Drager. Current Fields of Interest Primary: Differential Geometry, Integral Geometry Professional Affiliations American Mathematical Society, Mathematical Association of America. Teaching Experience Graduate courses Differentiable manifolds, real analysis, complex analysis. -

Spectral Dimensions and Dimension Spectra of Quantum Spacetimes
PHYSICAL REVIEW D 102, 086003 (2020) Spectral dimensions and dimension spectra of quantum spacetimes † Michał Eckstein 1,2,* and Tomasz Trześniewski 3,2, 1Institute of Theoretical Physics and Astrophysics, National Quantum Information Centre, Faculty of Mathematics, Physics and Informatics, University of Gdańsk, ulica Wita Stwosza 57, 80-308 Gdańsk, Poland 2Copernicus Center for Interdisciplinary Studies, ulica Szczepańska 1/5, 31-011 Kraków, Poland 3Institute of Theoretical Physics, Jagiellonian University, ulica S. Łojasiewicza 11, 30-348 Kraków, Poland (Received 11 June 2020; accepted 3 September 2020; published 5 October 2020) Different approaches to quantum gravity generally predict that the dimension of spacetime at the fundamental level is not 4. The principal tool to measure how the dimension changes between the IR and UV scales of the theory is the spectral dimension. On the other hand, the noncommutative-geometric perspective suggests that quantum spacetimes ought to be characterized by a discrete complex set—the dimension spectrum. We show that these two notions complement each other and the dimension spectrum is very useful in unraveling the UV behavior of the spectral dimension. We perform an extended analysis highlighting the trouble spots and illustrate the general results with two concrete examples: the quantum sphere and the κ-Minkowski spacetime, for a few different Laplacians. In particular, we find that the spectral dimensions of the former exhibit log-periodic oscillations, the amplitude of which decays rapidly as the deformation parameter tends to the classical value. In contrast, no such oscillations occur for either of the three considered Laplacians on the κ-Minkowski spacetime. DOI: 10.1103/PhysRevD.102.086003 I. -

SOME GEOMETRY in HIGH-DIMENSIONAL SPACES 11 Containing Cn(S) Tends to ∞ with N
SOME GEOMETRY IN HIGH-DIMENSIONAL SPACES MATH 527A 1. Introduction Our geometric intuition is derived from three-dimensional space. Three coordinates suffice. Many objects of interest in analysis, however, require far more coordinates for a complete description. For example, a function f with domain [−1; 1] is defined by infinitely many \coordi- nates" f(t), one for each t 2 [−1; 1]. Or, we could consider f as being P1 n determined by its Taylor series n=0 ant (when such a representation exists). In that case, the numbers a0; a1; a2;::: could be thought of as coordinates. Perhaps the association of Fourier coefficients (there are countably many of them) to a periodic function is familiar; those are again coordinates of a sort. Strange Things can happen in infinite dimensions. One usually meets these, gradually (reluctantly?), in a course on Real Analysis or Func- tional Analysis. But infinite dimensional spaces need not always be completely mysterious; sometimes one lucks out and can watch a \coun- terintuitive" phenomenon developing in Rn for large n. This might be of use in one of several ways: perhaps the behavior for large but finite n is already useful, or one can deduce an interesting statement about limn!1 of something, or a peculiarity of infinite-dimensional spaces is illuminated. I will describe some curious features of cubes and balls in Rn, as n ! 1. These illustrate a phenomenon called concentration of measure. It will turn out that the important law of large numbers from probability theory is just one manifestation of high-dimensional geometry. -

The Circle Method
The Circle Method Steven J. Miller and Ramin Takloo-Bighash July 14, 2004 Contents 1 Introduction to the Circle Method 3 1.1 Origins . 3 1.1.1 Partitions . 4 1.1.2 Waring’s Problem . 6 1.1.3 Goldbach’s conjecture . 9 1.2 The Circle Method . 9 1.2.1 Problems . 10 1.2.2 Setup . 11 1.2.3 Convergence Issues . 12 1.2.4 Major and Minor arcs . 13 1.2.5 Historical Remark . 14 1.2.6 Needed Number Theory Results . 15 1.3 Goldbach’s conjecture revisited . 16 1.3.1 Setup . 16 2 1.3.2 Average Value of |FN (x)| ............................. 17 1.3.3 Large Values of FN (x) ............................... 19 1.3.4 Definition of the Major and Minor Arcs . 20 1.3.5 The Major Arcs and the Singular Series . 22 1.3.6 Contribution from the Minor Arcs . 25 1.3.7 Why Goldbach’s Conjecture is Hard . 26 2 Circle Method: Heuristics for Germain Primes 29 2.1 Germain Primes . 29 2.2 Preliminaries . 31 2.2.1 Germain Integral . 32 2.2.2 The Major and Minor Arcs . 33 2.3 FN (x) and u(x) ....................................... 34 2.4 Approximating FN (x) on the Major arcs . 35 1 2.4.1 Boundary Term . 38 2.4.2 Integral Term . 40 2.5 Integrals over the Major Arcs . 42 2.5.1 Integrals of u(x) .................................. 42 2.5.2 Integrals of FN (x) ................................. 45 2.6 Major Arcs and the Singular Series . 46 2.6.1 Properties of Arithmetic Functions . -

Report on Diophantine Approximations Bulletin De La S
BULLETIN DE LA S. M. F. SERGE LANG Report on Diophantine approximations Bulletin de la S. M. F., tome 93 (1965), p. 177-192 <http://www.numdam.org/item?id=BSMF_1965__93__177_0> © Bulletin de la S. M. F., 1965, tous droits réservés. L’accès aux archives de la revue « Bulletin de la S. M. F. » (http: //smf.emath.fr/Publications/Bulletin/Presentation.html) implique l’accord avec les conditions générales d’utilisation (http://www.numdam.org/ conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Bull. Soc. math. France^ 93, ig65, p. 177 a 192. REPORT ON DIOPHANTINE APPROXIMATIONS (*) ; SERGE LANG. The theory of transcendental numbers and diophantine approxi- mations has only few results, most of which now appear isolated. It is difficult, at the present stage of development, to extract from the lite- rature more than what seems a random collection of statements, and this causes a vicious circle : On the one hand, technical difficulties make it difficult to enter the subject, since some definite ultimate goal seems to be lacking. On the other hand, because there are few results, there is not too much evidence to make sweeping conjectures, which would enhance the attractiveness of the subject. With these limitations in mind, I have nevertheless attempted to break the vicious circle by imagining what would be an optimal situa- tion, and perhaps recklessly to give a coherent account of what the theory might turn out to be. -

Complex Analysis and Complex Geometry
Complex Analysis and Complex Geometry Finnur Larusson,´ University of Adelaide Norman Levenberg, Indiana University Rasul Shafikov, University of Western Ontario Alexandre Sukhov, Universite´ des Sciences et Technologies de Lille May 1–6, 2016 1 Overview of the Field Complex analysis and complex geometry form synergy through the geometric ideas used in analysis and an- alytic tools employed in geometry, and therefore they should be viewed as two aspects of the same subject. The fundamental objects of the theory are complex manifolds and, more generally, complex spaces, holo- morphic functions on them, and holomorphic maps between them. Holomorphic functions can be defined in three equivalent ways as complex-differentiable functions, convergent power series, and as solutions of the homogeneous Cauchy-Riemann equation. The threefold nature of differentiability over the complex numbers gives complex analysis its distinctive character and is the ultimate reason why it is linked to so many areas of mathematics. Plurisubharmonic functions are not as well known to nonexperts as holomorphic functions. They were first explicitly defined in the 1940s, but they had already appeared in attempts to geometrically describe domains of holomorphy at the very beginning of several complex variables in the first decade of the 20th century. Since the 1960s, one of their most important roles has been as weights in a priori estimates for solving the Cauchy-Riemann equation. They are intimately related to the complex Monge-Ampere` equation, the second partial differential equation of complex analysis. There is also a potential-theoretic aspect to plurisubharmonic functions, which is the subject of pluripotential theory. In the early decades of the modern era of the subject, from the 1940s into the 1970s, the notion of a complex space took shape and the geometry of analytic varieties and holomorphic maps was developed. -

Zero-Dimensional Symmetry
Snapshots of modern mathematics № 3/2015 from Oberwolfach Zero-dimensional symmetry George Willis This snapshot is about zero-dimensional symmetry. Thanks to recent discoveries we now understand such symmetry better than previously imagined possible. While still far from complete, a picture of zero-dimen- sional symmetry is beginning to emerge. 1 An introduction to symmetry: spinning globes and infinite wallpapers Let’s begin with an example. Think of a sphere, for example a globe’s surface. Every point on it is specified by two parameters, longitude and latitude. This makes the sphere a two-dimensional surface. You can rotate the globe along an axis through the center; the object you obtain after the rotation still looks like the original globe (although now maybe New York is where the Mount Everest used to be), meaning that the sphere has rotational symmetry. Each rotation is prescribed by the latitude and longitude where the axis cuts the southern hemisphere, and by an angle through which it rotates the sphere. 1 These three parameters specify all rotations of the sphere, which thus has three-dimensional rotational symmetry. In general, a symmetry may be viewed as being a transformation (such as a rotation) that leaves an object looking unchanged. When one transformation is followed by a second, the result is a third transformation that is called the product of the other two. The collection of symmetries and their product 1 Note that we include the rotation through the angle 0, that is, the case where the globe actually does not rotate at all. 1 operation forms an algebraic structure called a group 2 .