Chapter 3 Hamilton's Equations with Euler Parameters for Rigid Body
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Understanding Euler Angles 1
Welcome Guest View Cart (0 items) Login Home Products Support News About Us Understanding Euler Angles 1. Introduction Attitude and Heading Sensors from CH Robotics can provide orientation information using both Euler Angles and Quaternions. Compared to quaternions, Euler Angles are simple and intuitive and they lend themselves well to simple analysis and control. On the other hand, Euler Angles are limited by a phenomenon called "Gimbal Lock," which we will investigate in more detail later. In applications where the sensor will never operate near pitch angles of +/‐ 90 degrees, Euler Angles are a good choice. Sensors from CH Robotics that can provide Euler Angle outputs include the GP9 GPS‐Aided AHRS, and the UM7 Orientation Sensor. Figure 1 ‐ The Inertial Frame Euler angles provide a way to represent the 3D orientation of an object using a combination of three rotations about different axes. For convenience, we use multiple coordinate frames to describe the orientation of the sensor, including the "inertial frame," the "vehicle‐1 frame," the "vehicle‐2 frame," and the "body frame." The inertial frame axes are Earth‐fixed, and the body frame axes are aligned with the sensor. The vehicle‐1 and vehicle‐2 are intermediary frames used for convenience when illustrating the sequence of operations that take us from the inertial frame to the body frame of the sensor. It may seem unnecessarily complicated to use four different coordinate frames to describe the orientation of the sensor, but the motivation for doing so will become clear as we proceed. For clarity, this application note assumes that the sensor is mounted to an aircraft. -

The Rolling Ball Problem on the Sphere
S˜ao Paulo Journal of Mathematical Sciences 6, 2 (2012), 145–154 The rolling ball problem on the sphere Laura M. O. Biscolla Universidade Paulista Rua Dr. Bacelar, 1212, CEP 04026–002 S˜aoPaulo, Brasil Universidade S˜aoJudas Tadeu Rua Taquari, 546, CEP 03166–000, S˜aoPaulo, Brasil E-mail address: [email protected] Jaume Llibre Departament de Matem`atiques, Universitat Aut`onomade Barcelona 08193 Bellaterra, Barcelona, Catalonia, Spain E-mail address: [email protected] Waldyr M. Oliva CAMGSD, LARSYS, Instituto Superior T´ecnico, UTL Av. Rovisco Pais, 1049–0011, Lisbon, Portugal Departamento de Matem´atica Aplicada Instituto de Matem´atica e Estat´ıstica, USP Rua do Mat˜ao,1010–CEP 05508–900, S˜aoPaulo, Brasil E-mail address: [email protected] Dedicated to Lu´ıs Magalh˜aes and Carlos Rocha on the occasion of their 60th birthdays Abstract. By a sequence of rolling motions without slipping or twist- ing along arcs of great circles outside the surface of a sphere of radius R, a spherical ball of unit radius has to be transferred from an initial state to an arbitrary final state taking into account the orientation of the ball. Assuming R > 1 we provide a new and shorter prove of the result of Frenkel and Garcia in [4] that with at most 4 moves we can go from a given initial state to an arbitrary final state. Important cases such as the so called elimination of the spin discrepancy are done with 3 moves only. 1991 Mathematics Subject Classification. Primary 58E25, 93B27. Key words: Control theory, rolling ball problem. -

Particle-On-A-Ring” Suppose a Diatomic Molecule Rotates in Such a Way That the Vibration of the Bond Is Unaffected by the Rotation
University of Washington Department of Chemistry Chemistry 453 Winter Quarter 2015 Lecture 17 2/25/15 Recommended Reading Atkins & DePaula 9.5 A. Background in Rotational Mechanics Two masses m1 and m2 connected by a weightless rigid “bond” of length r rotates with angular velocity rv where v is the linear velocity. As with vibrations we can render this rotation motion in simpler form by fixing one end of the bond to the origin terminating the other end with reduced mass , and allowing the reduced mass to rotate freely For two masses m1 and m2 separated by r the center of mass (CoM) is defined by the condition mr11 mr 2 2 (17.1) where m2,1 rr1,2 mm12 (17.2) Figure 17.1: Location of center of mass (CoM0 for two masses separated by a distance r. The moment of inertia I plays the role in the rotational energy that is played by mass in translational energy. The moment of inertia is 22 I mr11 mr 2 2 (17.3) Putting 17.3 into 17.4 we obtain I r 2 (17.4) mm where 12 . mm12 We can express the rotational kinetic energy K in terms of the angular momentum. The angular momentum is defined in terms of the cross product between the position vector r and the linear momentum vector p: Lrp (17.5) prprvrsin where the angle between p and r is ninety degrees for circular motion. As a cross product, the angular momentum vector L is perpendicular to the plane defined by the r and p vectors as shown in Figure 17.2 We can use equation 17.6 to obtain an expression for the kinetic energy in terms of the angular momentum L: Figure 17.2: The angular momentum L is a cross product of the position r vector and the linear momentum p=mv vector. -
Rotational Spectroscopy
Applied Spectroscopy Rotational Spectroscopy Recommended Reading: 1. Banwell and McCash: Chapter 2 2. Atkins: Chapter 16, sections 4 - 8 Aims In this section you will be introduced to 1) Rotational Energy Levels (term values) for diatomic molecules and linear polyatomic molecules 2) The rigid rotor approximation 3) The effects of centrifugal distortion on the energy levels 4) The Principle Moments of Inertia of a molecule. 5) Definitions of symmetric , spherical and asymmetric top molecules. 6) Experimental methods for measuring the pure rotational spectrum of a molecule Microwave Spectroscopy - Rotation of Molecules Microwave Spectroscopy is concerned with transitions between rotational energy levels in molecules. Definition d Electric Dipole: p = q.d +q -q p H Most heteronuclear molecules possess Cl a permanent dipole moment -q +q e.g HCl, NO, CO, H2O... p Molecules can interact with electromagnetic radiation, absorbing or emitting a photon of frequency ω, if they possess an electric dipole moment p, oscillating at the same frequency Gross Selection Rule: A molecule has a rotational spectrum only if it has a permanent dipole moment. Rotating molecule _ _ + + t _ + _ + dipole momentp dipole Homonuclear molecules (e.g. O2, H2, Cl2, Br2…. do not have a permanent dipole moment and therefore do not have a microwave spectrum! General features of rotating systems m Linear velocity v angular velocity v = distance ω = radians O r time time v = ω × r Moment of Inertia I = mr2. A molecule can have three different moments of inertia IA, IB and IC about orthogonal axes a, b and c. 2 I = ∑miri i R Note how ri is defined, it is the perpendicular distance from axis of rotation ri Rigid Diatomic Rotors ro IB = Ic, and IA = 0. -

Chapter 5 ANGULAR MOMENTUM and ROTATIONS
Chapter 5 ANGULAR MOMENTUM AND ROTATIONS In classical mechanics the total angular momentum L~ of an isolated system about any …xed point is conserved. The existence of a conserved vector L~ associated with such a system is itself a consequence of the fact that the associated Hamiltonian (or Lagrangian) is invariant under rotations, i.e., if the coordinates and momenta of the entire system are rotated “rigidly” about some point, the energy of the system is unchanged and, more importantly, is the same function of the dynamical variables as it was before the rotation. Such a circumstance would not apply, e.g., to a system lying in an externally imposed gravitational …eld pointing in some speci…c direction. Thus, the invariance of an isolated system under rotations ultimately arises from the fact that, in the absence of external …elds of this sort, space is isotropic; it behaves the same way in all directions. Not surprisingly, therefore, in quantum mechanics the individual Cartesian com- ponents Li of the total angular momentum operator L~ of an isolated system are also constants of the motion. The di¤erent components of L~ are not, however, compatible quantum observables. Indeed, as we will see the operators representing the components of angular momentum along di¤erent directions do not generally commute with one an- other. Thus, the vector operator L~ is not, strictly speaking, an observable, since it does not have a complete basis of eigenstates (which would have to be simultaneous eigenstates of all of its non-commuting components). This lack of commutivity often seems, at …rst encounter, as somewhat of a nuisance but, in fact, it intimately re‡ects the underlying structure of the three dimensional space in which we are immersed, and has its source in the fact that rotations in three dimensions about di¤erent axes do not commute with one another. -

Euler Quaternions
Four different ways to represent rotation my head is spinning... The space of rotations SO( 3) = {R ∈ R3×3 | RRT = I,det(R) = +1} Special orthogonal group(3): Why det( R ) = ± 1 ? − = − Rotations preserve distance: Rp1 Rp2 p1 p2 Rotations preserve orientation: ( ) × ( ) = ( × ) Rp1 Rp2 R p1 p2 The space of rotations SO( 3) = {R ∈ R3×3 | RRT = I,det(R) = +1} Special orthogonal group(3): Why it’s a group: • Closed under multiplication: if ∈ ( ) then ∈ ( ) R1, R2 SO 3 R1R2 SO 3 • Has an identity: ∃ ∈ ( ) = I SO 3 s.t. IR1 R1 • Has a unique inverse… • Is associative… Why orthogonal: • vectors in matrix are orthogonal Why it’s special: det( R ) = + 1 , NOT det(R) = ±1 Right hand coordinate system Possible rotation representations You need at least three numbers to represent an arbitrary rotation in SO(3) (Euler theorem). Some three-number representations: • ZYZ Euler angles • ZYX Euler angles (roll, pitch, yaw) • Axis angle One four-number representation: • quaternions ZYZ Euler Angles φ = θ rzyz ψ φ − φ cos sin 0 To get from A to B: φ = φ φ Rz ( ) sin cos 0 1. Rotate φ about z axis 0 0 1 θ θ 2. Then rotate θ about y axis cos 0 sin θ = ψ Ry ( ) 0 1 0 3. Then rotate about z axis − sinθ 0 cosθ ψ − ψ cos sin 0 ψ = ψ ψ Rz ( ) sin cos 0 0 0 1 ZYZ Euler Angles φ θ ψ Remember that R z ( ) R y ( ) R z ( ) encode the desired rotation in the pre- rotation reference frame: φ = pre−rotation Rz ( ) Rpost−rotation Therefore, the sequence of rotations is concatentated as follows: (φ θ ψ ) = φ θ ψ Rzyz , , Rz ( )Ry ( )Rz ( ) φ − φ θ θ ψ − ψ cos sin 0 cos 0 sin cos sin 0 (φ θ ψ ) = φ φ ψ ψ Rzyz , , sin cos 0 0 1 0 sin cos 0 0 0 1− sinθ 0 cosθ 0 0 1 − − − cφ cθ cψ sφ sψ cφ cθ sψ sφ cψ cφ sθ (φ θ ψ ) = + − + Rzyz , , sφ cθ cψ cφ sψ sφ cθ sψ cφ cψ sφ sθ − sθ cψ sθ sψ cθ ZYX Euler Angles (roll, pitch, yaw) φ − φ cos sin 0 To get from A to B: φ = φ φ Rz ( ) sin cos 0 1. -

Lecture 6: 3D Rigid Rotor, Spherical Harmonics, Angular Momentum
Lecture 6: 3D Rigid Rotor, Spherical Harmonics, Angular Momentum We can now extend the Rigid Rotor problem to a rotation in 3D, corre- sponding to motion on the surface of a sphere of radius R. The Hamiltonian operator in this case is derived from the Laplacian in spherical polar coordi- nates given as ∂2 ∂2 ∂2 ∂2 2 ∂ 1 1 ∂2 1 ∂ ∂ ∇2 = + + = + + + sin θ ∂x2 ∂y2 ∂z2 ∂r2 r ∂r r2 sin2 θ ∂φ2 sin θ ∂θ ∂θ For constant radius the first two terms are zero and we have 2 2 1 ∂2 1 ∂ ∂ Hˆ (θ, φ) = − ~ ∇2 = − ~ + sin θ 2m 2mR2 sin2 θ ∂φ2 sin θ ∂θ ∂θ We also note that Lˆ2 Hˆ = 2I where the operator for squared angular momentum is given by 1 ∂2 1 ∂ ∂ Lˆ2 = − 2 + sin θ ~ sin2 θ ∂φ2 sin θ ∂θ ∂θ The Schr¨odingerequation is given by 2 1 ∂2ψ(θ, φ) 1 ∂ ∂ψ(θ, φ) − ~ + sin θ = Eψ(θ, φ) 2mR2 sin2 θ ∂φ2 sin θ ∂θ ∂θ The wavefunctions are quantized in 2 directions corresponding to θ and φ. It is possible to derive the solutions, but we will not do it here. The solutions are denoted by Yl,ml (θ, φ) and are called spherical harmonics. The quantum 1 numbers take values l = 0, 1, 2, 3, .... and ml = 0, ±1, ±2, ... ± l. The energy depends only on l and is given by 2 E = l(l + 1) ~ 2I The first few spherical harmonics are given by r 1 Y = 0,0 4π r 3 Y = cos(θ) 1,0 4π r 3 Y = sin(θ)e±iφ 1,±1 8π r 5 Y = (3 cos2 θ − 1) 2,0 16π r 15 Y = cos θ sin θe±iφ 2,±1 8π r 15 Y = sin2 θe±2iφ 2,±2 32π These spherical harmonics are related to atomic orbitals in the H-atom. -

Theory of Angular Momentum and Spin
Chapter 5 Theory of Angular Momentum and Spin Rotational symmetry transformations, the group SO(3) of the associated rotation matrices and the 1 corresponding transformation matrices of spin{ 2 states forming the group SU(2) occupy a very important position in physics. The reason is that these transformations and groups are closely tied to the properties of elementary particles, the building blocks of matter, but also to the properties of composite systems. Examples of the latter with particularly simple transformation properties are closed shell atoms, e.g., helium, neon, argon, the magic number nuclei like carbon, or the proton and the neutron made up of three quarks, all composite systems which appear spherical as far as their charge distribution is concerned. In this section we want to investigate how elementary and composite systems are described. To develop a systematic description of rotational properties of composite quantum systems the consideration of rotational transformations is the best starting point. As an illustration we will consider first rotational transformations acting on vectors ~r in 3-dimensional space, i.e., ~r R3, 2 we will then consider transformations of wavefunctions (~r) of single particles in R3, and finally N transformations of products of wavefunctions like j(~rj) which represent a system of N (spin- Qj=1 zero) particles in R3. We will also review below the well-known fact that spin states under rotations behave essentially identical to angular momentum states, i.e., we will find that the algebraic properties of operators governing spatial and spin rotation are identical and that the results derived for products of angular momentum states can be applied to products of spin states or a combination of angular momentum and spin states. -

A 3D Model of the Rigid Rotor Supported by Journal Bearings)
A 3D MODEL OF THE RIGID ROTOR SUPPORTED BY JOURNAL BEARINGS) Jiří TŮMA1, Radim KLEČKA2, Jaromír ŠKUTA3 and Jiří ŠIMEK4 1 VSB – Technical University of Ostrava, Ostrava, Czech Republic, [email protected] 2 VSB – Technical University of Ostrava, Ostrava, Czech Republic, [email protected] 3 VSB – Technical University of Ostrava, Ostrava, Czech Republic, [email protected] 4 Techlab s.r.o., Sokolovská 207, 190 00 Praha 9, [email protected] Keywords: up to 7 keywords (10 pt) 1. Introduction It is known that the journal bearing with an oil film becomes instable if the rotor rotation speed crosses a certain value, which is called the Bently-Muszynska threshold [1]. To prevent the rotor instability, the active control can be employed. The arrangement of proximity probes and piezoactuators in a rotor system is shown in figure 1. It is assumed that the bushings (carrier ring), inserted into pedestals with clearance, is a movable part in two perpendicular directions while rotor is rotating. Im(r) Bushing Proximity probes Re(r) Ω Re(u) Journal Piezoactuators Im(r) Fig. 1. Journal coordinates and arrangement The research work supported by the GAČR (project no. 101/07/1345) is aimed at the design of the journal bearing active control based on the carrier ring position manipulation by the piezoactuators according to the proximity probe signals, which are a part of the closed loop including a controller. The effect of the feedback on the rotor stability is analyzed by [5]. The test stand of the TECHLAB design [1] is shown in figure 2. -

Rotation Matrix - Wikipedia, the Free Encyclopedia Page 1 of 22
Rotation matrix - Wikipedia, the free encyclopedia Page 1 of 22 Rotation matrix From Wikipedia, the free encyclopedia In linear algebra, a rotation matrix is a matrix that is used to perform a rotation in Euclidean space. For example the matrix rotates points in the xy -Cartesian plane counterclockwise through an angle θ about the origin of the Cartesian coordinate system. To perform the rotation, the position of each point must be represented by a column vector v, containing the coordinates of the point. A rotated vector is obtained by using the matrix multiplication Rv (see below for details). In two and three dimensions, rotation matrices are among the simplest algebraic descriptions of rotations, and are used extensively for computations in geometry, physics, and computer graphics. Though most applications involve rotations in two or three dimensions, rotation matrices can be defined for n-dimensional space. Rotation matrices are always square, with real entries. Algebraically, a rotation matrix in n-dimensions is a n × n special orthogonal matrix, i.e. an orthogonal matrix whose determinant is 1: . The set of all rotation matrices forms a group, known as the rotation group or the special orthogonal group. It is a subset of the orthogonal group, which includes reflections and consists of all orthogonal matrices with determinant 1 or -1, and of the special linear group, which includes all volume-preserving transformations and consists of matrices with determinant 1. Contents 1 Rotations in two dimensions 1.1 Non-standard orientation -
Rotational Spectroscopy
Rotational spectroscopy - Involve transitions between rotational states of the molecules (gaseous state!) - Energy difference between rotational levels of molecules has the same order of magnitude with microwave energy - Rotational spectroscopy is called pure rotational spectroscopy, to distinguish it from roto-vibrational spectroscopy (the molecule changes its state of vibration and rotation simultaneously) and vibronic spectroscopy (the molecule changes its electronic state and vibrational state simultaneously) Molecules do not rotate around an arbitrary axis! Generally, the rotation is around the mass center of the molecule. The rotational axis must allow the conservation of M R α pα const kinetic angular momentum. α Rotational spectroscopy Rotation of diatomic molecule - Classical description Diatomic molecule = a system formed by 2 different masses linked together with a rigid connector (rigid rotor = the bond length is assumed to be fixed!). The system rotation around the mass center is equivalent with the rotation of a particle with the mass μ (reduced mass) around the center of mass. 2 2 2 2 m1m2 2 The moment of inertia: I miri m1r1 m2r2 R R i m1 m2 Moment of inertia (I) is the rotational equivalent of mass (m). Angular velocity () is the equivalent of linear velocity (v). Er → rotational kinetic energy L = I → angular momentum mv 2 p2 Iω2 L2 E E c 2 2m r 2 2I Quantum rotation: The diatomic rigid rotor The rigid rotor represents the quantum mechanical “particle on a sphere” problem: Rotational energy is purely -
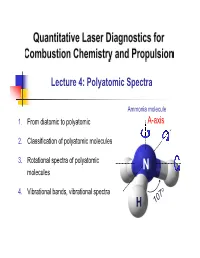
Lecture 4: Polyatomic Spectra
Lecture 4: Polyatomic Spectra Ammonia molecule 1. From diatomic to polyatomic A-axis 2. Classification of polyatomic molecules 3. Rotational spectra of polyatomic N molecules 4. Vibrational bands, vibrational spectra H 1. From diatomic to polyatomic Rotation – Diatomics Recall: For diatomic molecules Energy: FJ ,cm1 BJJ 1 DJ 2 J 12 R.R. Centrifugal distortion constant h Rotational constant: B,cm1 8 2 Ic Selection Rule: J ' J"1 J 1 3 Line position: J "1J " 2BJ"1 4D J"1 Notes: 2 1. D is small, i.e., D / B 4B / vib 1 2 2 D B 1.7 6 2. E.g., for NO, 4 4 310 B NO e 1900 → Even @ J=60, D / B J 2 ~ 0.01 What about polyatomics (≥3 atoms)? 2 1. From diatomic to polyatomic 3D-body rotation B . Convention: A A-axis is the “unique” or “figure” axis, along which lies the molecule’s C defining symmetry . 3 principal axes (orthogonal): A, B, C . 3 principal moments of inertia: IA, IB, IC . Molecules are classified in terms of the relative values of IA, IB, IC 3 2. Classification of polyatomic molecules Types of molecules Linear Symmetric Asymmetric Type Spherical Tops Molecules Tops Rotors Relative IB=IC≠IA magnitudes IB=IC; IA≈0* IA=IB=IC IA≠IB≠IC IA≠0 of IA,B,C NH CO2 3 H2O CH4 C2H2 CH F Examples 3 Acetylene NO2 OCS BCl3 Carbon Boron oxysulfide trichloride Relatively simple No dipole moment Largest category Not microwave active Most complex *Actually finite, but quantized momentum means it is in lowest state of rotation 4 2.