Perturbational and Nonperturbational Inversion of Love-Wave Velocities
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
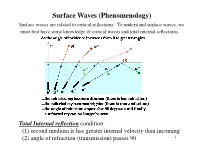
Surface Waves (Phenomenology) Surface Waves Are Related to Critical Reflections
Surface Waves (Phenomenology) Surface waves are related to critical reflections. To understand surface waves, we must first have some knowledge of critical waves and total internal reflections. Total Internal reflection condition: (1) second medium is has greater internal velocity than incoming (2) angle of refraction (transmission) passes 90 1 Wispering wall (not total internal reflection, total internal reflection but has similar effect): Beijing, China θ Nature of “wispering wall” or “wispering gallery”: A sound wave is trapped in a carefully designed circular enclosure. 2 The Sound Fixing and Ranging Channel (SOFAR channel) and Guided Waves A layer of low velocity zone inside ocean that ‘traps’ sound waves due to total internal reflection. Mainly by Maurice Ewing (the ‘Ewing Medal’ at AGU) in the 1940’s 3 Seismic Surface Waves Get me out of here, faaaaaassstttt…. .!! Seismic Surface Waves Facts We have discussed P and S waves, as well as interactions of SH, or P -SV waves near the free surface. As we all know that surface waves are extremely important for studying the crustal and upper mantle structure, as well as source characteristics. Surface Wave Characteristics: (1) Dominant between 10-200 sec (energy decays as r-1, with stationary depth distribution, but body wave r-2). (2) Dispersive which gives distinct depth sensitivity Types: (1)Rayleigh: P-SV equivalent, exists in elastic homogeneous halfspace (2) Love: SH equivalent, only exist if there is velocity gradient with depth (e.g., layer over halfspace) 5 Body wave propagation One person’s noise is another person’s signal. This is certainly true for what surface waves mean to an exploration geophysicist and to a global seismologist Energy decay in surface Surface Wave Propagation waves (as a function of r) is less than that of body wave (r2)--- the main reason that we always find larger surface waves than body waves, especially at long distances. -

Lab #24 Lab #1
LAB #1 LAB #24 Earthquakes Recommended Textbook Reading Prior to Lab: • Chapter 14, Geohazards: Volcanoes and Earthquakes 14.3 Tectonic Hazards: Faults and Earthquakes 14.4 Unstable Crust: Seismic Waves Goals: After completing this lab, you will be able to: • Classify the types and characteristics of body and surface seismic waves. • Interpret a seismogram and determine the likely seismic wave characteristics. • Determine the arrival time difference between selected P waves and S waves, and use a travel time curve to determine distance to an earthquake’s epicenter. • Use a drawing compass to triangulate an earthquake’s epicenter. • Quantify earthquake magnitude with a magnitude nomogramreproduction after interpreting key variables on a seismogram. • Calculate energy-released comparisons, as well as ground-motion comparisons, for selected earthquakes of varying magnitude. • Identify how an earthquake intensity scale differs from an earthquake magnitude scale. unauthorized • Carry out intensity interval sketching on a map following a hypothetical earthquake. No • Judge the likely earthquake intensity of selected cities during a hypothetical earthquake. 2014. Key Terms and Concepts: • epicenter • S wave • magnitude • seismograph (or seismometer) • magnitude nomogramFreeman • seismogram • modifi ed MercalliH. intensity (MMI) scale • travel time curve • P wave W. © Required Materials: • Drafting compass • Drawing compass • Ruler • Textbook: Living Physical Geography, by Bruce Gervais 273 © 2014 W. H. Freeman and Company LAB #24 Earthquakes 275 Problem-Solving Module #1: Earthquake Waves and the Travel Time Curve Earthquakes generate both P waves (primary) and S waves (secondary). Both P and S waves travel through Earth’s interior and are called body waves. Earthquakes also generate Rayleigh and Love waves. -

The Role of Sine and Cosine Components in Love Waves and Rayleigh Waves for Energy Hauling During Earthquake
American Journal of Applied Sciences 7 (12): 1550-1557, 2010 ISSN 1546-9239 © 2010 Science Publications The Role of Sine and Cosine Components in Love Waves and Rayleigh Waves for Energy Hauling during Earthquake Zainal Abdul Aziz and Dennis Ling Chuan Ching Department of Mathematics, Faculty of Science, University Technology Malaysia, 81310 Johor, Malaysia Abstract: Problem statement: Love waves or shear waves are referred to dispersive SH waves. The diffusive parameters are found to produce complex amplitude and diffusive waves for energy hauling. Approach: Analytical solutions are found for analysis and discussions. Results: When the standing waves are compared with the Love waves, similar cosine component is found in both waves. Energy hauling between waves is impossible for Love waves if the cosine component is independent. In the view of 3D particle motion, the sine component of the Rayleigh waves will interfere with shear waves and thus the energy hauling capability of shear waves are formed for generating directed dislocations. Nevertheless, the cnoidal waves with low elliptic parameter are shown to act analogous to Rayleigh waves. Conclusion: Love waves or Rayleigh waves are unable to propagate energy once the sine component does not exist. Key words: Energy hauling, sine and cosine, amplitude, love waves, Rayleigh waves, Cnoidal waves, earthquake, phase velocity, periodic, isotropic medium, illustrated, anisotropic INTRODUCTION seismology, Love waves are referred to shear waves and SH waves in layered medium are similar to Love waves. For this reason, the similarity between standing Seismic body waves are classified to P, SH and SV waves. Similar waves have being derived in vector waves and Love waves must be exploited. -

The Branch of Science That Studies Earthquakes Is: ______
The branch of science that studies earthquakes is: __________ A. Earthquake Regions on Earth Question: What does the map of these earthquakes seem to resemble? _____________________________________________ _______________________________________ B. Earthquake by Definition: _____________________________________________ _______________________________________ - Caused by: - The energy: Earthquakes in PA Date Local Time Magnitude April 22, 2009 9:21 1.1 April 23, 2009 6:26 2.4 April 24, 2009 1:36 2.9 April 30, 2009 18:36 2.0 May 11, 2009 01:18 1.3 May 11, 2009 01:34 1.2 October 25, 2009 07:16 2.6 October 25, 2009 07:18 1.8 October 25, 2009 07:21 2.8 Note: Largest Earthquake in PA was: ________________________ Recently close earthquake was: ________________________ Location: Time: Magnitude: Question: Where do you notice these earthquakes occurring? _______________________________________________ Boundaries and types of Earthquakes •Build up of _________________________________ Which boundary?__________ ___ Type of Earthquake: ______________ Boundary: ___________ Plate Interaction: ___________________ Type of Earthquakes: ____________________ Boundary: _____________ Plate Interaction: ___________________ Type of Earthquakes: ___________________ Boundary: ___________ Plate Interaction: ___________________ Type of Earthquakes: ____________________ Boundary: ___________ Plate Interaction: ___________________ Type of Earthquakes: ____________________ Types of Faults Fault: ___________________________ Three Main Types: Normal, Reverse, Strike-Slip -

Love Wave Biosensors: a Review
Chapter 11 Love Wave Biosensors: A Review María Isabel Rocha Gaso, Yolanda Jiménez, Laurent A. Francis and Antonio Arnau Additional information is available at the end of the chapter http://dx.doi.org/10.5772/53077 1. Introduction In the fields of analytical and physical chemistry, medical diagnostics and biotechnology there is an increasing demand of highly selective and sensitive analytical techniques which, optimally, allow an in real-time label-free monitoring with easy to use, reliable, miniatur‐ ized and low cost devices. Biosensors meet many of the above features which have led them to gain a place in the analytical bench top as alternative or complementary methods for rou‐ tine classical analysis. Different sensing technologies are being used for biosensors. Catego‐ rized by the transducer mechanism, optical and acoustic wave sensing technologies have emerged as very promising biosensors technologies. Optical sensing represents the most of‐ ten technology currently used in biosensors applications. Among others, Surface Plasmon Resonance (SPR) is probably one of the better known label-free optical techniques, being the main shortcoming of this method its high cost. Acoustic wave devices represent a cost-effec‐ tive alternative to these advanced optical approaches [1], since they combine their direct de‐ tection, simplicity in handling, real-time monitoring, good sensitivity and selectivity capabilities with a more reduced cost. The main challenges of the acoustic techniques re‐ main on the improvement of the sensitivity with the objective to reduce the limit of detec‐ tion (LOD), multi-analysis and multi-analyte detection (High-Throughput Screening systems-HTS), and integration capabilities. Acoustic sensing has taken advantage of the progress made in the last decades in piezoelec‐ tric resonators for radio-frequency (rf) telecommunication technologies. -
GE 162 Introduction to Seismology
California Institute of Technology – Seismological Laboratory GE 162 Introduction to Seismology Lecture notes Jean Paul (Pablo) Ampuero – [email protected] Winter 2013 - 2016 GE 162 Introduction to Seismology Winter 2013 - 2016 Contents 1 Overview and 1D wave equation .......................................................................................................... 5 1.1 Overview, etc ................................................................................................................................ 5 1.2 Longitudinal waves in a rod: derivation of the wave equation .................................................... 5 1.2.1 Description of the problem and kinematics.......................................................................... 5 1.2.2 Dynamics ............................................................................................................................... 6 1.2.3 Rheology ............................................................................................................................... 6 1.2.4 The 1D wave equation .......................................................................................................... 6 2 1D wave equation: solution and main properties ................................................................................ 8 2.1 General solution ............................................................................................................................ 8 2.2 Reflection at one end ................................................................................................................... -

8 Surface Waves and Normal Modes
8 Surface waves and normal modes Our treatment to this point has been limited to body waves, solutions to the seismic wave equation that exist in whole spaces. However, when free surfaces exist in a medium, other solutions are possible and are given the name surface waves. There are two types of surface waves that propagate along Earth’s surface: Rayleigh waves and Love waves. For laterally homogeneous models, Rayleigh waves are radially polarized (P/SV) and exist at any free surface, whereas Love waves are transversely polarized and require some velocity increase with depth (or a spherical geometry). Surface waves are generally the strongest arrivals recorded at teleseismic distances and they provide some of the best constraints on Earth’s shallow structure and low-frequency source properties. They differ from body waves in many respects – they travel more slowly, their amplitude decay with range is generally much less, and their velocities are strongly frequency dependent. Surface waves from large earthquakes are observable for many hours, during which time they circle the Earth multiple times. Constructive interference among these orbiting surface waves, to- gether with analogous reverberations of body waves, form the normal modes,or free oscillations of the Earth. Surface waves and normal modes are generally ob- served at periods longer than about 10 s, in contrast to the much shorter periods seen in many body wave observations. 8.1 Love waves Love waves are formed through the constructive interference of high-order SH surface multiples (i.e., SSS, SSSS, SSSSS, etc.). Thus, it is possible to model Love waves as a sum of body waves. -

A Mathematical Study of Voigt Viscoelastic Love Wave Propagation
Scholars' Mine Masters Theses Student Theses and Dissertations 1966 A mathematical study of Voigt viscoelastic Love wave propagation David Nuse Peacock Follow this and additional works at: https://scholarsmine.mst.edu/masters_theses Part of the Engineering Commons, and the Geophysics and Seismology Commons Department: Recommended Citation Peacock, David Nuse, "A mathematical study of Voigt viscoelastic Love wave propagation" (1966). Masters Theses. 7089. https://scholarsmine.mst.edu/masters_theses/7089 This thesis is brought to you by Scholars' Mine, a service of the Missouri S&T Library and Learning Resources. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution requires the permission of the copyright holder. For more information, please contact [email protected]. A t•lATHEMATICAL STUDY OF VOIGT VISCOELASTIC LOVE WAVE PROPAGATION BY DAVID NUSE PEACOCK- i ,,; __ :S - A THESIS submitted to the faculty of THE UNIVERSITY OF MISSOURI AT ROLLA in partial fulfillment of the requirements for the Degree of ~ASTER OF SCIENCE IN GEOPHYSICAL ENGINEERING Rolla, Missouri 1966 j .., ' --<'I' Approved by ,;., Y" .., ,9;1, 6 -A&J/3. (tY--f?._j (advisor) .de~ A$.~ 122522 ii ABSTRACT This research is a mathematical investigation of the propagation of a Love wave in a Voigt viscoelastic medium. A solution to the partial differential equation of motion is assumed and is shown to satisfy the three necessary boundary conditions. Velocity restrictions on the wave and the media are developed and are shown to be of the same form as those governing the elastic Love wave. iii ACKNOWLEDGEMENTS The author wishes to express his appreciation to Dr. -

Sions: from Dispersion Curve to Full Wave- Form
High-resolution characterization of near- surface structures by surface-wave inver- sions: From dispersion curve to full wave- form Yudi Pan, Lingli Gao, Thomas Bohlen CRC Preprint 2019/3, January 2019 KARLSRUHE INSTITUTE OF TECHNOLOGY KIT – The Research University in the Helmholtz Association www.kit.edu Participating universities Funded by ISSN 2365-662X 2 Surveys in Geophysics manuscript No. (will be inserted by the editor) High-resolution characterization of near-surface structures by surface-wave inversions: From dispersion curve to full waveform Yudi Pan · Lingli Gao · Thomas Bohlen Received: 07.Jan.2019 / Accepted: 09.Jan.2019 Abstract Surface waves are widely used in near-surface geophysics and provide a non-invasive way to determine near-surface structures. By extracting and inverting dispersion curves to obtain local 1D S-wave velocity profiles, multichannel analysis of surface waves (MASW) has been proven as an efficient way to analyze shallow-seismic surface waves. By directly inverting the observed waveforms, full-waveform inversion (FWI) provides another feasible way to use surface waves in reconstructing near-surface structures. This paper provides a state of the art on MASW and shallow-seismic FWI, and a comparison of both methods. A two-parameter numerical test is performed to analyze the nonlinearity of MASW and FWI, including the classical, the multiscale, the envelope-based, and the amplitude-spectrum-based FWI approaches. A checkerboard model is used to compare the resolution of MASW and FWI. These numerical examples show that classical FWI has the highest nonlinearity and resolution among these methods, while MASW has the lowest nonlinearity and resolution. -
Lecture 4 Surface Waves and Dispersion
Observational Seismology Lecture 4 Surface Waves and Dispersion GNH7/GG09/GEOL4002 EARTHQUAKE SEISMOLOGY AND EARTHQUAKE HAZARD Surface Wave Dispersion GNH7/GG09/GEOL4002 EARTHQUAKE SEISMOLOGY AND EARTHQUAKE HAZARD Observations stretched stretched dispersed PS SS SSS wave packet surface waves Body waves Impulsive, short period (but later arrivals are stretched out due to attenuation). Higher frequencies make waves “sharper”. Surface waves Dispersed, arrive in wave packets. But note a wave packet might be a single wavelet (oceanic arrivals). GNH7/GG09/GEOL4002 EARTHQUAKE SEISMOLOGY AND EARTHQUAKE HAZARD Reminder Period T Phase velocity v = f λ Amp f – frequency = 1/T (s-1) λ - wavelength (m) t But a whole spectrum of different period or frequency waves are emitted from an earthquake because earthquake rupture is a complex fracture process. GNH7/GG09/GEOL4002 EARTHQUAKE SEISMOLOGY AND EARTHQUAKE HAZARD Body waves Body waves all travel at the same velocity even if they are different frequencies, as travelling through the body of the Earth where velocity changes are gradual (except for major discontinuities). Reminder 1/ 2 ⎛ 4 ⎞ K S + .µ α = ⎜ 3 ⎟ ⎜ ρ ⎟ ↓v increasing ⎝ ⎠ 1/ 2 ⎛ µ ⎞ β = ⎜ ⎟ ⎝ ρ ⎠ Velocity just depends on local elastic properties, e.g, of core or mantle GNH7/GG09/GEOL4002 EARTHQUAKE SEISMOLOGY AND EARTHQUAKE HAZARD Types of surface waves Love wave Rayleigh wave GNH7/GG09/GEOL4002 EARTHQUAKE SEISMOLOGY AND EARTHQUAKE HAZARD Surface waves Surface waves travel close to surface depth z Amplitude of surface waves decays exponentially with depth Amplitude −Z Z0 A(z) = A0 e Characteristic depth Amplitude at surface of penetration At Z = Z0 A(z) = A0 / e ~ A0 / 2 i.e., the amplitude at the characteristic depth of penetration is approx. -

1. Introduction
SEISMIC WAVES AND EARTHQUAKE LOCATION J.R. Kayal Geological Survey of India, 27, J.L. Nehru Road Road, Kolkata – 700 016 email : [email protected] SEISMIC WAVES Two basic types of elastic waves or seismic waves are generated by an earthquake; these are body waves and surface waves. These waves cause shaking that is felt, and cause damage in various ways. These waves are similar in many important ways to the familiar waves in air generated by a hand-clap or in water generated by a stone thrown into water. Body Waves The body waves propagate within a body of rock. The faster of these body waves is called Primary wave (P-wave), or longitudinal wave or compressional wave, and the slower one is called Secondary wave (S-wave) or shear wave. P-wave The P-wave motion, same as that of sound wave in air, alternately pushes (compresses) and pulls (dilates) the rock (Fig. 1). The motion of the particles is always in the direction of propagation. The P-wave, just like sound wave, travels through both solid rock such as granite and liquid material such as volcanic magma or water. It may be mentioned that, because of sound like nature, when P-wave emerges from deep in the Earth to the surface, a fraction of it is transmitted into atmosphere as sound waves. Such sounds, if frequency is greater than 15 cycles per second, are audible to animals or human beings. These are known as earthquake sound. 1 Fig 1 : Seismic wave propagation The relation between compressional or P-wave velocity (Vp) and the elastic constants E (Young's modulus), σ (Poisson's ratio), K (bulk modulus), µ (rigidity modulus), λ (Lame's constant) and density ρ is given as follows: 1 ⎧(λ + 2µ)⎫ 2 V p = ⎨ ⎬ (1) ⎩ ρ ⎭ S-wave It is known that the S-wave or the shear wave shears the rock sideways at right angle to the direction of propagation (Fig. -

Geovision 2018
REPORT SURFACE WAVE MEASUREMENTS CALIFORNIA STRONG MOTION INSTRUMENTATION PROGRAM STATIONS SANTA CLARA, SANTA CRUZ, SAN BENITO AND MONTEREY COUNTIES, CALIFORNIA GEOVision Project No. 18045 Prepared for State of California Department of Conservation California Geological Survey Strong Motion Instrumentation Program 801 K Street Sacramento, CA 94612 Prepared by GEOVision Geophysical Services, Inc. 1124 Olympic Drive Corona, California 92881 Report 18045-01 June 22, 2018 TABLE OF CONTENTS 1 INTRODUCTION .............................................................................................................................................. 1 2 OVERVIEW OF SURFACE WAVE METHODS .......................................................................................... 4 3 FIELD PROCEDURES ................................................................................................................................... 11 3.1 SITE PREPARATION AND SURVEY CONTROL................................................................................................... 11 3.2 MASW SURVEY ............................................................................................................................................ 12 3.3 ARRAY MICROTREMOR SURVEY .................................................................................................................... 14 3.4 HVSR MEASUREMENTS ................................................................................................................................. 16 4 DATA REDUCTION AND