8 Surface Waves and Normal Modes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rayleigh Sound Wave Propagation on a Gallium Single Crystal in a Liquid He3 Bath G
Rayleigh sound wave propagation on a gallium single crystal in a liquid He3 bath G. Bellessa To cite this version: G. Bellessa. Rayleigh sound wave propagation on a gallium single crystal in a liquid He3 bath. Journal de Physique Lettres, Edp sciences, 1975, 36 (5), pp.137-139. 10.1051/jphyslet:01975003605013700. jpa-00231172 HAL Id: jpa-00231172 https://hal.archives-ouvertes.fr/jpa-00231172 Submitted on 1 Jan 1975 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. L-137 RAYLEIGH SOUND WAVE PROPAGATION ON A GALLIUM SINGLE CRYSTAL IN A LIQUID He3 BATH G. BELLESSA Laboratoire de Physique des Solides (*) Université Paris-Sud, Centre d’Orsay, 91405 Orsay, France Résumé. - Nous décrivons l’observation de la propagation d’ondes élastiques de Rayleigh sur un monocristal de gallium. Les fréquences d’études sont comprises entre 40 MHz et 120 MHz et la température d’étude la plus basse est 0,4 K. La vitesse et l’atténuation sont étudiées à des tempéra- tures différentes. L’atténuation des ondes de Rayleigh par le bain d’He3 est aussi étudiée à des tem- pératures et des fréquences différentes. -

Ellipticity of Seismic Rayleigh Waves for Subsurface Architectured Ground with Holes
Experimental evidence of auxetic features in seismic metamaterials: Ellipticity of seismic Rayleigh waves for subsurface architectured ground with holes Stéphane Brûlé1, Stefan Enoch2 and Sébastien Guenneau2 1Ménard, Chaponost, France 1, Route du Dôme, 69630 Chaponost 2 Aix Marseille Univ, CNRS, Centrale Marseille, Institut Fresnel, Marseille, France 52 Avenue Escadrille Normandie Niemen, 13013 Marseille e-mail address: [email protected] Structured soils with regular meshes of metric size holes implemented in first ten meters of the ground have been theoretically and experimentally tested under seismic disturbance this last decade. Structured soils with rigid inclusions embedded in a substratum have been also recently developed. The influence of these inclusions in the ground can be characterized in different ways: redistribution of energy within the network with focusing effects for seismic metamaterials, wave reflection, frequency filtering, reduction of the amplitude of seismic signal energy, etc. Here we first provide some time-domain analysis of the flat lens effect in conjunction with some form of external cloaking of Rayleigh waves and then we experimentally show the effect of a finite mesh of cylindrical holes on the ellipticity of the surface Rayleigh waves at the level of the Earth’s surface. Orbital diagrams in time domain are drawn for the surface particle’s velocity in vertical (x, z) and horizontal (x, y) planes. These results enable us to observe that the mesh of holes locally creates a tilt of the axes of the ellipse and changes the direction of particle movement. Interestingly, changes of Rayleigh waves ellipticity can be interpreted as changes of an effective Poisson ratio. -

Development of an Acoustic Microscope to Measure Residual Stress Via Ultrasonic Rayleigh Wave Velocity Measurements Jane Carol Johnson Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 1995 Development of an acoustic microscope to measure residual stress via ultrasonic Rayleigh wave velocity measurements Jane Carol Johnson Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Applied Mechanics Commons Recommended Citation Johnson, Jane Carol, "Development of an acoustic microscope to measure residual stress via ultrasonic Rayleigh wave velocity measurements " (1995). Retrospective Theses and Dissertations. 11061. https://lib.dr.iastate.edu/rtd/11061 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. INFORMATION TO USERS This manuscript has been reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from any type of computer printer. The quality of this reproduction is dependent upon the quali^ of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleedthrough, substandard margins, and inqvoper alignment can adversely affect reproduction. In the unlikely event that the author did not send UMI a complete manuscript and there are missing pages, these will be noted. Also, if unauthorized copyright material had to be removed, a note win indicate the deletion. Oversize materials (e.g., maps, drawings, charts) are reproduced by sectioning the original, beginning at the upper left-hand comer and continuing from left to right in equal sections with small overk^. -
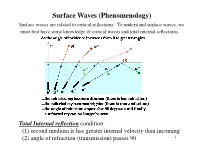
Surface Waves (Phenomenology) Surface Waves Are Related to Critical Reflections
Surface Waves (Phenomenology) Surface waves are related to critical reflections. To understand surface waves, we must first have some knowledge of critical waves and total internal reflections. Total Internal reflection condition: (1) second medium is has greater internal velocity than incoming (2) angle of refraction (transmission) passes 90 1 Wispering wall (not total internal reflection, total internal reflection but has similar effect): Beijing, China θ Nature of “wispering wall” or “wispering gallery”: A sound wave is trapped in a carefully designed circular enclosure. 2 The Sound Fixing and Ranging Channel (SOFAR channel) and Guided Waves A layer of low velocity zone inside ocean that ‘traps’ sound waves due to total internal reflection. Mainly by Maurice Ewing (the ‘Ewing Medal’ at AGU) in the 1940’s 3 Seismic Surface Waves Get me out of here, faaaaaassstttt…. .!! Seismic Surface Waves Facts We have discussed P and S waves, as well as interactions of SH, or P -SV waves near the free surface. As we all know that surface waves are extremely important for studying the crustal and upper mantle structure, as well as source characteristics. Surface Wave Characteristics: (1) Dominant between 10-200 sec (energy decays as r-1, with stationary depth distribution, but body wave r-2). (2) Dispersive which gives distinct depth sensitivity Types: (1)Rayleigh: P-SV equivalent, exists in elastic homogeneous halfspace (2) Love: SH equivalent, only exist if there is velocity gradient with depth (e.g., layer over halfspace) 5 Body wave propagation One person’s noise is another person’s signal. This is certainly true for what surface waves mean to an exploration geophysicist and to a global seismologist Energy decay in surface Surface Wave Propagation waves (as a function of r) is less than that of body wave (r2)--- the main reason that we always find larger surface waves than body waves, especially at long distances. -

Resonance Beyond Frequency-Matching
Resonance Beyond Frequency-Matching Zhenyu Wang (王振宇)1, Mingzhe Li (李明哲)1,2, & Ruifang Wang (王瑞方)1,2* 1 Department of Physics, Xiamen University, Xiamen 361005, China. 2 Institute of Theoretical Physics and Astrophysics, Xiamen University, Xiamen 361005, China. *Corresponding author. [email protected] Resonance, defined as the oscillation of a system when the temporal frequency of an external stimulus matches a natural frequency of the system, is important in both fundamental physics and applied disciplines. However, the spatial character of oscillation is not considered in the definition of resonance. In this work, we reveal the creation of spatial resonance when the stimulus matches the space pattern of a normal mode in an oscillating system. The complete resonance, which we call multidimensional resonance, is a combination of both the spatial and the conventionally defined (temporal) resonance and can be several orders of magnitude stronger than the temporal resonance alone. We further elucidate that the spin wave produced by multidimensional resonance drives considerably faster reversal of the vortex core in a magnetic nanodisk. Our findings provide insight into the nature of wave dynamics and open the door to novel applications. I. INTRODUCTION Resonance is a universal property of oscillation in both classical and quantum physics[1,2]. Resonance occurs at a wide range of scales, from subatomic particles[2,3] to astronomical objects[4]. A thorough understanding of resonance is therefore crucial for both fundamental research[4-8] and numerous related applications[9-12]. The simplest resonance system is composed of one oscillating element, for instance, a pendulum. Such a simple system features a single inherent resonance frequency. -

Normal Modes of the Earth
Proceedings of the Second HELAS International Conference IOP Publishing Journal of Physics: Conference Series 118 (2008) 012004 doi:10.1088/1742-6596/118/1/012004 Normal modes of the Earth Jean-Paul Montagner and Genevi`eve Roult Institut de Physique du Globe, UMR/CNRS 7154, 4 Place Jussieu, 75252 Paris, France E-mail: [email protected] Abstract. The free oscillations of the Earth were observed for the first time in the 1960s. They can be divided into spheroidal modes and toroidal modes, which are characterized by three quantum numbers n, l, and m. In a spherically symmetric Earth, the modes are degenerate in m, but the influence of rotation and lateral heterogeneities within the Earth splits the modes and lifts this degeneracy. The occurrence of the Great Sumatra-Andaman earthquake on 24 December 2004 provided unprecedented high-quality seismic data recorded by the broadband stations of the FDSN (Federation of Digital Seismograph Networks). For the first time, it has been possible to observe a very large collection of split modes, not only spheroidal modes but also toroidal modes. 1. Introduction Seismic waves can be generated by different kinds of sources (tectonic, volcanic, oceanic, atmospheric, cryospheric, or human activity). They are recorded by seismometers in a very broad frequency band. Modern broadband seismometers which equip global seismic networks (such as GEOSCOPE or IRIS/GSN) record seismic waves between 0.1 mHz and 10 Hz. Most seismologists use seismic records at frequencies larger than 10 mHz (e.g. [1]). However, the very low frequency range (below 10 mHz) has also been used extensively over the last 40 years and provides unvaluable information on the whole Earth. -

22.51 Course Notes, Chapter 9: Harmonic Oscillator
9. Harmonic Oscillator 9.1 Harmonic Oscillator 9.1.1 Classical harmonic oscillator and h.o. model 9.1.2 Oscillator Hamiltonian: Position and momentum operators 9.1.3 Position representation 9.1.4 Heisenberg picture 9.1.5 Schr¨odinger picture 9.2 Uncertainty relationships 9.3 Coherent States 9.3.1 Expansion in terms of number states 9.3.2 Non-Orthogonality 9.3.3 Uncertainty relationships 9.3.4 X-representation 9.4 Phonons 9.4.1 Harmonic oscillator model for a crystal 9.4.2 Phonons as normal modes of the lattice vibration 9.4.3 Thermal energy density and Specific Heat 9.1 Harmonic Oscillator We have considered up to this moment only systems with a finite number of energy levels; we are now going to consider a system with an infinite number of energy levels: the quantum harmonic oscillator (h.o.). The quantum h.o. is a model that describes systems with a characteristic energy spectrum, given by a ladder of evenly spaced energy levels. The energy difference between two consecutive levels is ∆E. The number of levels is infinite, but there must exist a minimum energy, since the energy must always be positive. Given this spectrum, we expect the Hamiltonian will have the form 1 n = n + ~ω n , H | i 2 | i where each level in the ladder is identified by a number n. The name of the model is due to the analogy with characteristics of classical h.o., which we will review first. 9.1.1 Classical harmonic oscillator and h.o. -

Normal Modes (Free Oscillations)
Introduction to Seismology: Lecture Notes 22 April 2005 SEISMOLOGY: NORMAL MODES (FREE OSCILLATIONS) DECOMPOSING SEISMOLOGY INTO SUBDISCIPLINES Seismology can be decomposed into three representative subdisciplines: body waves, surface waves, and normal modes of free oscillation. Technically, these domains form a continuum, each pertaining to particular frequency bands, spatial scales, etc. In all cases, these representations satisfy the wave equation, but each is subject to different boundary conditions and simplifying assumptions. Each is therefore relevant to particular types of subsurface investigation. Below is a table summarizing the salient characteristics of the three. Boundary Seismic Domains Type Application Data Conditions Body Waves P-SV SH High frequency travel times; waveforms unbounded dispersion; group c(w) & Surface Waves Rayleigh Love Lithosphere phase u(w) velocities interfaces spherical Normal Modes Spheroidal Modes Toroidal Modes Global power spectra earth As the table suggests, the normal modes provide a framework for representing global seismic waves. Typically, these modes of free oscillation are of extremely low frequency and are therefore difficult to observe in seismograms. Only the most energetic earthquakes are capable of generating free oscillations that are readily apparent on most seismograms, and then only if the seismograms extend over several days. NORMAL MODES To understand normal modes, which describe the modes of free oscillation of a sphere, it’s instructive to consider the 1D analog of a vibrating string fixed at both ends as shown in panel Figure 1b. This is useful because the 3D case (Figure 1c), similar to the 1D case, requires that Figure 1 Figure by MIT OCW. 1 Introduction to Seismology: Lecture Notes 22 April 2005 standing waves ‘wrap around’ and meet at a null point. -

Lab #24 Lab #1
LAB #1 LAB #24 Earthquakes Recommended Textbook Reading Prior to Lab: • Chapter 14, Geohazards: Volcanoes and Earthquakes 14.3 Tectonic Hazards: Faults and Earthquakes 14.4 Unstable Crust: Seismic Waves Goals: After completing this lab, you will be able to: • Classify the types and characteristics of body and surface seismic waves. • Interpret a seismogram and determine the likely seismic wave characteristics. • Determine the arrival time difference between selected P waves and S waves, and use a travel time curve to determine distance to an earthquake’s epicenter. • Use a drawing compass to triangulate an earthquake’s epicenter. • Quantify earthquake magnitude with a magnitude nomogramreproduction after interpreting key variables on a seismogram. • Calculate energy-released comparisons, as well as ground-motion comparisons, for selected earthquakes of varying magnitude. • Identify how an earthquake intensity scale differs from an earthquake magnitude scale. unauthorized • Carry out intensity interval sketching on a map following a hypothetical earthquake. No • Judge the likely earthquake intensity of selected cities during a hypothetical earthquake. 2014. Key Terms and Concepts: • epicenter • S wave • magnitude • seismograph (or seismometer) • magnitude nomogramFreeman • seismogram • modifi ed MercalliH. intensity (MMI) scale • travel time curve • P wave W. © Required Materials: • Drafting compass • Drawing compass • Ruler • Textbook: Living Physical Geography, by Bruce Gervais 273 © 2014 W. H. Freeman and Company LAB #24 Earthquakes 275 Problem-Solving Module #1: Earthquake Waves and the Travel Time Curve Earthquakes generate both P waves (primary) and S waves (secondary). Both P and S waves travel through Earth’s interior and are called body waves. Earthquakes also generate Rayleigh and Love waves. -

Normal Mode Analysis ©David Ronis Mcgill University
Chemistry 365: Normal Mode Analysis ©David Ronis McGill University 1. Quantum Mechanical Treatment Our starting point is the Schrodinger wav e equation: N −2 ∂2 − h + → → Ψ → → = Ψ → → Σ → U(r1,...,r N ) (r1,...,r N ) E (r1,...,r N ), (1.1) = ∂ 2 i 1 2mi ri where N is the number of atoms in the molecule, mi is the mass of the i’th atom, and → → U(r1,...,r N )isthe effective potential for the nuclear motion, e.g., as is obtained in the Born- Oppenheimer approximation. If the amplitude of the vibrational motion is small, then the vibrational part of the Hamil- tonian associated with Eq. (1.1) can be written as: N −2 ∂2 N ↔ → → ≈− h + + 1 ∆ ∆ Hvib Σ →2 U0 Σ Ki, j: i j,(1.2) i=1 2mi ∂∆ 2 i, j=1 i → ∆ ≡ → − → → where U0 is the minimum value of the potential energy, i ri Ri, Ri is the equilibrium posi- tion of the i’th atom, and 2 ↔ ∂ ≡ U Ki, j → → (1.3) ∂ ∂ → ri r j → r k = Rk is the matrix of (harmonic) force constants. Henceforth, we will shift the zero of energy so as to = make U0 0. Note that in obtaining Eq. (1.2), we have neglected anharmonic (i.e., cubic and higher order) corrections to the vibrational motion. The next and most confusing step is to change to matrix notation. We introduce a column vector containing the displacements as: ∆≡ ∆x ∆y ∆z ∆x ∆y ∆z T [ 1 , 1, 1,..., N , N , N ] ,(1.4) where "T"denotes a matrix transpose. -

The Role of Sine and Cosine Components in Love Waves and Rayleigh Waves for Energy Hauling During Earthquake
American Journal of Applied Sciences 7 (12): 1550-1557, 2010 ISSN 1546-9239 © 2010 Science Publications The Role of Sine and Cosine Components in Love Waves and Rayleigh Waves for Energy Hauling during Earthquake Zainal Abdul Aziz and Dennis Ling Chuan Ching Department of Mathematics, Faculty of Science, University Technology Malaysia, 81310 Johor, Malaysia Abstract: Problem statement: Love waves or shear waves are referred to dispersive SH waves. The diffusive parameters are found to produce complex amplitude and diffusive waves for energy hauling. Approach: Analytical solutions are found for analysis and discussions. Results: When the standing waves are compared with the Love waves, similar cosine component is found in both waves. Energy hauling between waves is impossible for Love waves if the cosine component is independent. In the view of 3D particle motion, the sine component of the Rayleigh waves will interfere with shear waves and thus the energy hauling capability of shear waves are formed for generating directed dislocations. Nevertheless, the cnoidal waves with low elliptic parameter are shown to act analogous to Rayleigh waves. Conclusion: Love waves or Rayleigh waves are unable to propagate energy once the sine component does not exist. Key words: Energy hauling, sine and cosine, amplitude, love waves, Rayleigh waves, Cnoidal waves, earthquake, phase velocity, periodic, isotropic medium, illustrated, anisotropic INTRODUCTION seismology, Love waves are referred to shear waves and SH waves in layered medium are similar to Love waves. For this reason, the similarity between standing Seismic body waves are classified to P, SH and SV waves. Similar waves have being derived in vector waves and Love waves must be exploited. -

Group Velocity Measurements of Earthquake Rayleigh Wave by S Transform and Comparison with MFT
EARTH SCIENCES RESEARCH JOURNAL Earth Sci. Res. J. Vol. 24, No. 1 (March, 2020): 91-95 GEOPHYSICS Group Velocity Measurements of Earthquake Rayleigh Wave by S Transform and Comparison with MFT Chanjun Jianga,b,c, Youxue Wanga,b*, Gaofu Zengd aSchool of Earth Science, Guilin University of Technology, Guilin 541006, China. bGuangxi Key Laboratory of Hidden Metallic Ore Deposits Exploration, Guilin 541006, China. cBowen College of Management, Guilin University of Technology, Guilin 541006, China. dChina Nonferrous Metals (Guilin) Geology and Mining Co,. Ltd, Guilin 541006, China. * Corresponding author: [email protected] ABSTRACT Keywords: Earthquake Rayleigh waves; group Based upon the synthetic Rayleigh wave at different epicentral distances and real earthquake Rayleigh wave, S velocity; S transform; Multiple Filter Technique. transform is used to measure their group velocities, compared with the Multiple Filter Technique (MFT) which is the most commonly used method for group-velocity measurements. When the period is greater than 15 s, especially than 40 s, S transform has higher accuracy than MFT at all epicenter distances. When the period is less than or equal to 15 s, the accuracy of S transform is lower than that of MFT at epicentral distances of 1000 km and 8000 km (especially 8000 km), and the accuracy of such two methods is similar at the other epicentral distances. On the whole, S transform is more accurate than MFT. Furthermore, MFT is dominantly dependent on the value of the Gaussian filter parameter α , but S transform is self-adaptive. Therefore, S transform is a more stable and accurate method than MFT for group velocity measurement of earthquake Rayleigh waves.