A Survey of Free Software for the Design, Analysis, Modelling, and Simulation of an Unmanned Aerial Vehicle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Codesaturne Practical User's Guide
EDF R&D Fluid Dynamics, Power Generation and Environment Department Single Phase Thermal-Hydraulics Group 6, quai Watier F-78401 Chatou Cedex Tel: 33 1 30 87 75 40 Fax: 33 1 30 87 79 16 JUNE 2017 Code Saturne documentation Code Saturne version 5.0.0 practical user's guide contact: [email protected] http://code-saturne.org/ c EDF 2017 Code Saturne EDF R&D Code Saturne version 5.0.0 practical user's documentation guide Page 1/142 ABSTRACT Code Saturne is a system designed to solve the Navier-Stokes equations in the cases of 2D, 2D ax- isymmetric or 3D flows. Its main module is designed for the simulation of flows which may be steady or unsteady, laminar or turbulent, incompressible or potentially dilatable, isothermal or not. Scalars and turbulent fluctuations of scalars can be taken into account. The code includes specific modules, referred to as \specific physics", for the treatment of Lagrangian particle tracking, semi-transparent radiative transfer, gas combustion, pulverised coal combustion, electricity effects (Joule effect and elec- tric arcs) and compressible flows. Code Saturne relies on a finite volume discretisation and allows the use of various mesh types which may be hybrid (containing several kinds of elements) and may have structural non-conformities (hanging nodes). The present document is a practical user's guide for Code Saturne version 5.0.0. It is the result of the joint effort of all the members in the development team. It presents all the necessary elements to run a calculation with Code Saturne version 5.0.0. -

Implementation and Validation of an Advanced Wind Energy Controller in Aero-Servo-Elastic Simulations Using the Lifting Line Free Vortex Wake Model
energies Article Implementation and Validation of an Advanced Wind Energy Controller in Aero-Servo-Elastic Simulations Using the Lifting Line Free Vortex Wake Model Sebastian Perez-Becker *, David Marten, Christian Navid Nayeri and Christian Oliver Paschereit Chair of Fluid Dynamics, Hermann Föttinger Institute, Technische Universität Berlin, Müller-Breslau-Str. 8, 10623 Berlin, Germany; [email protected] (D.M.); [email protected] (C.N.N.); [email protected] (C.O.P.) * Correspondence: [email protected] Abstract: Accurate and reproducible aeroelastic load calculations are indispensable for designing modern multi-MW wind turbines. They are also essential for assessing the load reduction capabilities of advanced wind turbine control strategies. In this paper, we contribute to this topic by introducing the TUB Controller, an advanced open-source wind turbine controller capable of performing full load calculations. It is compatible with the aeroelastic software QBlade, which features a lifting line free vortex wake aerodynamic model. The paper describes in detail the controller and includes a validation study against an established open-source controller from the literature. Both controllers show comparable performance with our chosen metrics. Furthermore, we analyze the advanced load reduction capabilities of the individual pitch control strategy included in the TUB Controller. Turbulent wind simulations with the DTU 10 MW Reference Wind Turbine featuring the individual pitch control strategy show a decrease in the out-of-plane and torsional blade root bending moment fatigue loads of 14% and 9.4% respectively compared to a baseline controller. Citation: Perez-Becker, S.; Marten, D.; Nayeri, C.N.; Paschereit, C.O. -
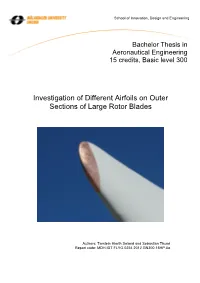
Investigation of Different Airfoils on Outer Sections of Large Rotor Blades
School of Innovation, Design and Engineering Bachelor Thesis in Aeronautical Engineering 15 credits, Basic level 300 Investigation of Different Airfoils on Outer Sections of Large Rotor Blades Authors: Torstein Hiorth Soland and Sebastian Thuné Report code: MDH.IDT.FLYG.0254.2012.GN300.15HP.Ae Sammanfattning Vindkraft står för ca 3 % av jordens produktion av elektricitet. I jakten på grönare kraft, så ligger mycket av uppmärksamheten på att få mer elektricitet från vindens kinetiska energi med hjälp av vindturbiner. Vindturbiner har använts för elektricitetsproduktion sedan 1887 och sedan dess så har turbinerna blivit signifikant större och med högre verkningsgrad. Driftsförhållandena förändras avsevärt över en rotors längd. Inre delen är oftast utsatt för mer komplexa driftsförhållanden än den yttre delen. Den yttre delen har emellertid mycket större inverkan på kraft och lastalstring. Här är efterfrågan på god aerodynamisk prestanda mycket stor. Vingprofiler för mitten/yttersektionen har undersökts för att passa till en 7.0 MW rotor med diametern 165 meter. Kriterier för bladprestanda ställdes upp och sensitivitetsanalys gjordes. Med hjälp av programmen XFLR5 (XFoil) och Qblade så sattes ett blad ihop av varierande vingprofiler som sedan testades med bladelement momentum teorin. Huvuduppgiften var att göra en simulering av rotorn med en aero-elastisk kod som gav information beträffande driftsbelastningar på rotorbladet för olika vingprofiler. Dessa resultat validerades i ett professionellt program för aeroelasticitet (Flex5) som simulerar steady state, turbulent och wind shear. De bästa vingprofilerna från denna rapportens profilkatalog är NACA 63-6XX och NACA 64-6XX. Genom att implementera dessa vingprofiler på blad design 2 och 3 så erhölls en mycket hög prestanda jämfört med stora kommersiella HAWT rotorer. -

Wind Field Simulation in a Wind Farm Using Openfoam and Actuator Line Model
ParCFD'2019 31st International Conference on Parallel Computational Fluid Dynamics May-14-17 2019, Antalya TURKEY WIND FIELD SIMULATION IN A WIND FARM USING OPENFOAM AND ACTUATOR LINE MODEL Huseyin Can Onel∗ & Dr. Ismail H. Tuncery ∗ Middle East Technical University (METU) Department of Aerospace Engineering 06800 Ankara, TURKEY e-mail: [email protected] yMiddle East Technical University (METU) Department of Aerospace Engineering 06800 Ankara, TURKEY e-mail: [email protected] - Web page: http://www.ae.metu.edu.tr/tuncer/ Key words: Aerospace applications, Wind turbine, HAWT, Actuator Line Model, Wake calculation Abstract. In this study, a horizontal axis wind turbine (HAWT) is modeled using so called Actuator Line Model (ALM), where full resolution of boundary layer over turbine blades is not needed and hence computation is cheaper. Results are validated against other numerical and experimental studies as well as panel method (XFOIL) and Blade Element Momentum Theory (BEMT) results which are still widely employed in today's wind energy industry. Important simulation and operation parameters and their effects on accuracy are discussed. It is concluded that within a certain range of tip speed ratios, ALM gives acceptable results and is a promising model for full-scale wind farm simulations to estimate energy production. 1 INTRODUCTION Market share of renewable energy grows at ever highest rates and wind turbine and wind farm design processes becomes more sophisticated with the advancements in computation technologies. There are two main design problems in wind energy: • Design of an individual wind turbine at its ideal operation conditions, where classical methods like 2D airfoil theory, potential flow theory and Blade Element Momentum Theory (BEMT) are still widely used, • Design of a complete wind farm, in which statistical meteorological data is used for macro-siting and simple analytical or empirical methods are used for micro-siting. -

Developments in the Modeling & Simulation Program at EDF
Developments in the Modeling & Simulation Program at EDF. Potential Collaboration Topics CASL Industry Council Meeting. Charleston, SC. April 4-5 2017 Didier Banner Presentation outline EDF’s M&S tools and software policy Current trends in numerical simulation -------------------- On-going CASL – CEA –EDF collaboration Potential collaboration on the NESTOR data EDF Key figures • French NPP fleet • 58 operating reactors, from 900 MW to 1450 MW • 157 to 205 fuel assemblies per reactor • Fuel cycles - 12 or 18 months • Fuel assemblies renewal from 1/4th to 1/3rd • Some estimated costs* • One day of outage: ~1 M€ • Total fuel cost: ~5 €/MWh • Major retrofit in France: ~50 b€ Including post-Fukushima program: ~10 b€ EDF R&D KEY FIGURES Use of Modelling &Simulation - examples Resistance to impact Tightness of the (projectiles) Seismic Analysis containment vessel Environmental impacts Behaviour of turbines Dismantling Waste Storage Tightness of the primary loop Control of nuclear Behaviour of the reactions pressure vessel EDF Modeling and Simulation policy Models Specific studies: i.e FSI interaction,irradiation, turbulence,.. Codes i.e CFD (Saturne), Neutronics (Cocagne),Mechanics (Aster) Platforms Interoperability, Users’s experience --------------------- Development Strategy - examples EDF Open-Source CFD (Saturne), Mechanics(Aster), Free Surface Flow EDF developments-not open source Neutronics, Electromagnetics, … Codevelopment/Partnership Two-phase flow (Neptune), Fast transient dynamics,.. Commercial Software: Ansys, Abaqus, EDF Modeling -

S Government of India Atomic Energy Commission Annual
' '/• B.A.R.C-1263 S "7 U as GOVERNMENT OF INDIA TOIT5J 3^TI 3TP7TT ATOMIC ENERGY COMMISSION ANNUAL PROGRESS REPORT FOR 1984 OF THEORETICAL PHYSICS DIVISION by B. P. Rastogi, S. V. G. Menon and R. P. Jain BHABHA ATOMIC RESEARCH CENTRE BOMBAY, INDIA 1985 B.A.R.C. - 1263 GOVERNMENT OF INDIA ATOMIC ENERGY COMMISSION O ffl ANNUAL PROGRESS REPORT FOR 1984 OP THEORETICAL PHYSICS DIVISION by B.P.Rastogl, S.V.G.Menon and R.P.Jain BHABHA ATOMIC RESEARCH CENTRE BOMBAY, INDIA 1985 BARC-1263 IMS Subject Category : E2100 Descriptors BARC RESEARCH PROGRAMS REACTOR KINETICS T CODES C CODES MULTIGROUP THEORY NEUTRON DIFFUSION EQUATION REACTOR SAFETY THERMONUCLEAR REACTIONS FEYNMAN PATH INTEGRALS TRANSPORT THEORY FOKKER-PLANCK EQUATION ABSTRACT This report presents a resume of the work done In the Theoretical Physics Division during the calendar year 1984. The report is divided Into two parts, namely, Nuclear Technology and Mathematical Physics. The topics covered ire described by brief summaries. A list of research publications and papers presented In symposia / workshops is also included. TABLE OF CONTENTS NUCLEAR TECHNOLOGY 1.1 Research and Development for Reactor Physics Analysis of Large 1 PHWRs 1.2 Development of a Computer Code CLUBPU for Calculating 4 Hyperflne Power Distribution In Fuel Pins of PHWR Fuel Cluster 1.3 Burnup Analysis of 28-, and 37-Rod Fuel Cluster for 500 MWe PHWR 4 1.4 Computer Code Development for Fuel Management of PHWRs 4 1.5 Adaptation of TRIVKNI and TUMULT on ND-Computer 5 1.6 Adequacy of One Bundle as Mesh In TAQUIL Code -

Free Software for the Modelling and Simulation of a Mini-UAV an Analysis
Mathematics and Computers in Science and Industry Free Software for the Modelling and Simulation of a mini-UAV An Analysis Tomáš Vogeltanz, Roman Jašek Department of Informatics and Artificial Intelligence Tomas Bata University in Zlín, Faculty of Applied Informatics nám. T.G. Masaryka 5555, 760 01 Zlín, CZECH REPUBLIC [email protected], [email protected] Abstract—This paper presents an analysis of free software Current standards for handling qualities apply to only which can be used for the modelling and simulation of a mini- piloted aircraft and there are no specific standards for UAV UAV (Unmanned Aerial Vehicle). Every UAV design, handling qualities. Relevant article discussing dynamic stability construction, implementation and test is unique and presents and handling qualities for small UAVs is [4]. [2] different challenges to engineers. Modelling and simulation software can decrease the time and costs needed to development Any UAV system depends on its mission and range, of any UAV. First part of paper is about general information of however, most UAV systems include: airframe and propulsion the UAV. The fundamentals of airplane flight mechanics are systems, control systems and sensors to fly the UAV, sensors mentioned. The following section briefly describes the modelling to collect information, launch and recovery systems, data links and simulation of the UAV and a flight dynamics model. The to get collected information from the UAV and send main section summarizes free software for the modelling and commands to it, and a ground control station. [3] [5] simulation of the UAV. There is described the following software: Digital Datcom, JSBSim, FlightGear, and OpenEaagles. -

Development of a Coupling Approach for Multi-Physics Analyses of Fusion Reactors
Development of a coupling approach for multi-physics analyses of fusion reactors Zur Erlangung des akademischen Grades eines Doktors der Ingenieurwissenschaften (Dr.-Ing.) bei der Fakultat¨ fur¨ Maschinenbau des Karlsruher Instituts fur¨ Technologie (KIT) genehmigte DISSERTATION von Yuefeng Qiu Datum der mundlichen¨ Prufung:¨ 12. 05. 2016 Referent: Prof. Dr. Stieglitz Korreferent: Prof. Dr. Moslang¨ This document is licensed under the Creative Commons Attribution – Share Alike 3.0 DE License (CC BY-SA 3.0 DE): http://creativecommons.org/licenses/by-sa/3.0/de/ Abstract Fusion reactors are complex systems which are built of many complex components and sub-systems with irregular geometries. Their design involves many interdependent multi- physics problems which require coupled neutronic, thermal hydraulic (TH) and structural mechanical (SM) analyses. In this work, an integrated system has been developed to achieve coupled multi-physics analyses of complex fusion reactor systems. An advanced Monte Carlo (MC) modeling approach has been first developed for converting complex models to MC models with hybrid constructive solid and unstructured mesh geometries. A Tessellation-Tetrahedralization approach has been proposed for generating accurate and efficient unstructured meshes for describing MC models. For coupled multi-physics analyses, a high-fidelity coupling approach has been developed for the physical conservative data mapping from MC meshes to TH and SM meshes. Interfaces have been implemented for the MC codes MCNP5/6, TRIPOLI-4 and Geant4, the CFD codes CFX and Fluent, and the FE analysis platform ANSYS Workbench. Furthermore, these approaches have been implemented and integrated into the SALOME simulation platform. Therefore, a coupling system has been developed, which covers the entire analysis cycle of CAD design, neutronic, TH and SM analyses. -

Ali Ramezani –
BCAM-Basque Center for Applied Mathematics Alameda Mazarredo, 14.,48009 Bilbao Bizkaia, Basque Country, Spain T +34 946 567 842 u +34 946 567 843 B [email protected] Ali Ramezani Í http://www.bcamath.org/en/people/aramezani Present position 2013–Present Senior Research Fellow, BCAM-Basque Center for Applied Mathematics, Bilbao, Spain. CFD Research Group Education 2003–2009 PhD, Sharif University of Technology, Tehran, Iran, Aerospace Engineering- Aerodynamics. 1999–2002 MS, Sharif University of Technology, Tehran, Iran, Aerospace Engineering- Aerodynamics. 1994–1999 BS, AmirKabir University of Technology, Tehran, Iran, Aerospace Engineering. Research Fields CFD (Computational Fluid Dynamics), Aerodynamics, Renewable energy, Marine Energy, Fluid mechanics and Heat Transfer Research Interests Data Mining Machine Learning, Artificial Intelligence FV Compressible flows, Incompressible Flows. FSI Moving Meshes, Overset Grids, Morphing. Parallel MPI, OpenMP, GPU and Cloud Computing. Processing Convergence FAS Multigrid, AGMG, Implicit, AF and ADI. Turbulence RANS, LES and VMS Grid Unstructured/Structured, AMR, Quad Paving. Generation FE Heat Transfer, Incompressible Flows. High Order DG, Spectral Methods, WENO. Multiphase Gas particle, VOF, LPT Flows Meshless SPH, LBM, LPT 1/8 Reduced POD and Certified Reduced Basis Order Modeling Vocational history 2013–Present Senior Research Fellow, BCAM-Basque Center for Applied Mathematics, Bilbao- Spain, CFD Research Line. I am mainly working on three projects: { BCAM-BALTOGAR CFD Platform for Turbomachinery Simulation and Design (Main Developer) { FRACTAL: Laser-feeder coating system design and optimization (BCAM PI) { LOINTEK: Numerical simulation of heat exchangers (BCAM PI) More details of my present and accomplished tasks: { BBIPED open source code (BECAM BALTOGAR CFD Platform) - Extension of SU2 code for the MultiZone Rotating Reference Frame (Standard MRF and a new approach called VMRF). -
Soloud Audio Engine
SoLoud Audio Engine Jari Komppa May 21, 2014 Contents 1 Introduction 2 1.1 How Easy? ..................................... 2 1.2 How Free? ..................................... 2 1.3 How Powerful? ................................... 3 1.4 There’s a Catch, Right? .............................. 3 2 Legal 4 2.1 SoLoud Proper ................................... 4 2.2 OGG Support ................................... 4 2.3 Speech Synthesizer ................................ 4 2.4 Fast Fourier Transform (FFT) ........................... 5 2.5 Sfxr ........................................ 5 2.6 Libmodplug .................................... 6 3 Quick Start 7 3.1 Download SoLoud ................................. 7 3.2 Add files to your project ............................. 7 3.3 Include files .................................... 7 3.4 Variables ..................................... 7 3.5 Initialize SoLoud .................................. 7 3.6 Set up sound sources ............................... 8 3.7 Play sounds .................................... 8 3.8 Take control of the sound ............................. 8 3.9 Cleanup ...................................... 8 3.10 Enjoy ....................................... 8 4 Premake 9 5 Concepts 10 5.1 Back end ..................................... 10 5.2 Channel ...................................... 10 5.3 Stream ...................................... 10 5.4 Clipping ...................................... 10 5.5 Sample ...................................... 11 5.6 Sample Rate ................................... -

Intel Xeon W-1200 Workstation Processors Product Brief
PRODUCT BRIEF | Intel® Xeon® W-1200 Workstation Processors PROFESSIONAL PERFORMANCE POWER AN ENTRY-LEVEL PROFESSIONAL WORKSTATION WITH AN INTEL® Xeon® W-1200 PROCESSOR Intel® Xeon® W-1200 processors (succeeding the Intel® Xeon® E-2200 processors) deliver great performance for entry workstation users with integrated processor graphics alongside the added reliability and confidence of Error Correcting Code (ECC) memory. Get outstanding performance plus best-in-class manageability features and support for ground- breaking technologies that enable you to visualize, simulate, research and work with greater accuracy than ever before. PROFESSIONAL Performance WHEN IT MATTERS • Up to 10 Cores | Up to 20 Threads • Up to 4.1 GHz Base • Up to 5.3 GHz with Intel® Thermal Velocity Boost1 • NEW Intel® Turbo Boost Max Technology 3.0 • Support for up to 128 GB DDR4-2933 ECC Memory2 • Intel® Wi-Fi AX202 (Gig+) support using CNVi³ FeaTURED TecHNOLOGIES • Intel® Hyper-Threading Technology • Up to 40 processor PCIe* lanes • Error-correcting code (ECC) memory support • Thunderbolt™ 3 support • Intel® Optane™ technology support • Intel vPro® platform support A NEW LEVEL OF Performance Designed to deliver an entry-level platform for professionals requiring a true workstation, Intel® Xeon® W-1200 processors are specially optimized for a wide range of workflows and industries such as health and life sciences, financial services, architecture, engineering and construction (AEC). IncreaseD CapaBILITY ENHANCED Performance FAST ConnecTIVITY NEW—Intel® Thermal Velocity Boost NEW—UP TO 5.3 GHz NEW—2.5G Intel® Ethernet Controller Technology i225 support4 Get up to a blazing 5.3 GHz clock speed, Even the most complex workflows won’t Network speed is essential in today’s right out of the box for fast performance. -
Freecad a Manual.Pdf
Table of Contents Introduction 1.1 Discovering FreeCAD 1.2 What is FreeCAD? 1.2.1 Installing 1.2.2 Installing on Windows 1.2.2.1 Installing on Linux 1.2.2.2 Installing on Mac OS 1.2.2.3 Uninstalling 1.2.2.4 Setting basic preferences 1.2.2.5 Installing additional content 1.2.2.6 The FreeCAD interface 1.2.3 Workbenches 1.2.3.1 The interface 1.2.3.2 Customizing the interface 1.2.3.3 Navigating in the 3D view 1.2.4 A word about the 3D space 1.2.4.1 The FreeCAD 3D view 1.2.4.2 Selecting objects 1.2.4.3 The FreeCAD document 1.2.5 Parametric objects 1.2.6 Import and export to other filetypes 1.2.7 Working with FreeCAD 1.3 All workbenches at a glance 1.3.1 Traditional modeling, the CSG way 1.3.2 Traditional 2D drafting 1.3.3 Modeling for product design 1.3.4 Preparing models for 3D printing 1.3.5 Exporting to slicers 1.3.5.1 Converting objects to meshes 1.3.5.2 Using Slic3r 1.3.5.3 2 Using the Cura addon 1.3.5.4 Generating G-code 1.3.5.5 Generating 2D drawings 1.3.6 BIM modeling 1.3.7 Using spreadsheets 1.3.8 Reading properties 1.3.8.1 Writing properties 1.3.8.2 Creating FEM analyses 1.3.9 Creating renderings 1.3.10 Python scripting 1.4 A gentle introduction 1.4.1 Writing Python code 1.4.1.1 Manipulating FreeCAD objects 1.4.1.2 Vectors and Placements 1.4.1.3 Creating and manipulating geometry 1.4.2 Creating parametric objects 1.4.3 Creating interface tools 1.4.4 The community 1.5 3 Introduction A FreeCAD manual Note: The manual has been moved to the official FreeCAD wiki which is now its new home.