Aas 16-464 Lunar Advanced Radar Orbiter For
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

S·O:3::~:~T~!E~~ W!~1~;Dmi~E Te~~- ~~:C:#R.:~~ I~Rt~:Rh~4I!I~Ts · ~Perin,~Ne 'R~9.Ioh ·± ~ .~I.G,Ll.T · I;>E J5est Aqhi'ev~Q:J
... , .~ ~70 10029 ~~. '' .. M ·]\.l;la~y~;:~,i·s o.f · th~ Sqi~:ntiiib D~TE: O<::tdbe.r 13, · 1970 ob:j e'¢.tive$· · and J?.:i;-OJ?ps~d +,.an~iin<J . s:i.. tes irt the. aadley.:.Ap,ennine Re:gion FROM: J . w. lie ad case:34o .) The possible scientiEic objectives at the Hadley~ Ap~nnine region a·re out:~ined: CI;J:ld incl,~de. tlle Ap.el}n:~ne Mo,un;t;;tins 1 H~dley. R.±l:le, mar.e mai;.erial~· lladleyf] c qr~·teri yol·can·ic ra:.Pd'"" :~;s·o:3::~:~t~!e~~ w!~1~;dmi~e te~~- ~~:C:#R.:~~ i~rt~:rH~4i!i~ts · ~perin,~ne 'r~9.ioh ·± ~ .~i.g,ll.t · i;>e J5est aqhi'ev~q:j . ·ba$¢d: on cli;ff.e;temt .irit¢]tpret:a~ions of t:h~. origin {Jf :J:hese va,r$.o\lS fe~tures. Five la'ii~i:hg po;iri·ts are evcl;:l:U.atea: in terms of· t:J:ie, ..$:1;:1,3, ty to acnlev¢ the 'sq;lentific o_bjectfves bo~ on a rover .and a walkil19 mii.s;.. sion. ·c .0 ,.... :.. ..,... .. ··ti:]9::ijii11·-·· uncla:s 12811' .B"'E~I¥-:t,;.;CPM~M • .INC. • ss5· ~;ENFAt4T' P~~~~~I~~::s:y;1 . ~As~IW~ro~~ o:.C: -~01)2~.· .. SUBJECT! oAT£: octo.b~r 1:3~ · 1970 .FROMi j.· W. Head t. GEN:E!M:4 li'~cii~yt~Ap~ni1.ine · 'l'h.~ ~pepf!irie Mol;tn-ta.in!3 rise. up to -~' km· above th.e. -

New Candidate Pits and Caves at High Latitudes on the Near Side of the Moon
52nd Lunar and Planetary Science Conference 2021 (LPI Contrib. No. 2548) 2733.pdf NEW CANDIDATE PITS AND CAVES AT HIGH LATITUDES ON THE NEAR SIDE OF THE MOON. 1,2 1,3,4 1 2 Wynnie Avent II and Pascal Lee , S ETI Institute, Mountain View, VA, USA, V irginia Polytechnic Institute 3 4 and State University Blacksburg, VA, USA. M ars Institute, N ASA Ames Research Center. Summary: 35 new candidate pits are identified in Anaxagoras and Philolaus, two high-latitude impact structures on the near side of the Moon. Introduction: Since the discovery in 2009 of the Marius Hills Pit (Haruyama et al. 2009), a.k.a. the “Haruyama Cavern”, over 300 hundred pits have been identified on the Moon (Wagner & Robinson 2014, Robinson & Wagner 2018). Lunar pits are small (10 to 150 m across), steep-walled, negative relief features (topographic depressions), surrounded by funnel-shaped outer slopes and, unlike impact craters, no raised rim. They are interpreted as collapse features resulting from the fall of the roof of shallow (a few Figure 1: Location of studied craters (Polar meters deep) subsurface voids, generally lava cavities. projection). Although pits on the Moon are found in mare basalt, impact melt deposits, and highland terrain of the >300 Methods: Like previous studies searching for pits pits known, all but 16 are in impact melts (Robinson & (Wagner & Robinson 2014, Robinson & Wagner 2018, Wagner 2018). Many pits are likely lava tube skylights, Lee 2018a,b,c), we used imaging data collected by the providing access to underground networks of NASA Lunar Reconnaissance Orbiter (LRO) Narrow tunnel-shaped caves, including possibly complex Angle Camera (NAC). -

EPSC-DPS2011-1845, 2011 EPSC-DPS Joint Meeting 2011 C Author(S) 2011
EPSC Abstracts Vol. 6, EPSC-DPS2011-1845, 2011 EPSC-DPS Joint Meeting 2011 c Author(s) 2011 Analysis of mineralogy of an effusive volcanic lunar dome in Marius Hills, Oceanus Procellarum. A.S. Arya, Guneshwar Thangjam, R.P. Rajasekhar, Ajai Space Applications Centre, Indian Space Research Organization, Ahmedabad-380 015 (India). Email:[email protected] Abstract found on the lunar surface. As a part of initiation of the study of mineralogy of MHC, an effusive dome Domes are analogous to the terrestrial shield located in the south of Rima Galilaei, near the volcanoes and are among the important volcanic contact of Imbrian and Eratosthenian geological units features found on the lunar surface indicative of is taken up for the present study. The morphology, effusive vents of primary volcanism within Mare rheology and the possible dike parameters have regions. Marius Hills Complex (MHC) is one of the already been studied and reported [5]. most important regions on the entire lunar surface, having a complex geological setting and largest distribution of volcanic constructs with an abundant number of volcanic features like domes, cones and rilles. The mineralogical study of an effusive dome located in the south of Rima Galilaei, near the contact of Imbrian and Eratosthenian geological units is done using hyperspectral band parameters and spectral plots so as to understand the compositional variation, the nature of the volcanism and relate it to the rheology of the dome. Fig. 1: Distribution of dome in MHC (Red-the dome under study, Green- from Virtual Moon Atlas, Magenta [6]) and the Study area showing the dome under study on M3 1. -

Nasa Langley Research Center 2012
National Aeronautics and Space Administration NASA LANGLEY RESEARCH CENTER 2012 www.nasa.gov An Orion crew capsule test article moments before it is dropped into a An Atlantis flag flew outside Langley’s water basin at Langley to simulate an ocean splashdown. headquarters building during NASA’s final space shuttle mission in July. Launching a New Era of Exploration Welcome to Langley NASA Langley had a banner year in 2012 as we helped propel the nation toward a new age of air and space. From delivering on missions to creating new technologies and knowledge for space, aviation and science, Langley continued the rich tradition of innovation begun 95 years ago. Langley is providing leading-edge research and game-changing technology innovations for human space exploration. We are testing prototype articles of the Orion crew vehicle to optimize designs and improve landing systems for increased crew survivability. Langley has had a role in private-industry space exploration through agreements with SpaceX, Sierra Nevada Corp. and Boeing to provide engineering expertise, conduct testing and support research. Aerospace and Science With the rest of the world, we held our breath as the Curiosity rover landed on Mars – with Langley’s help. The Langley team performed millions of simulations of the entry, descent and landing phase of the Mars Science Laboratory mission to enable a perfect landing, Langley Center Director Lesa Roe and Mark Sirangelo, corporate and for the first time made temperature and pressure vice president and head of Sierra Nevada Space Systems, with measurements as the spacecraft descended, providing the Dream Chaser Space System model. -

TRANSIENT LUNAR PHENOMENA: REGULARITY and REALITY Arlin P
The Astrophysical Journal, 697:1–15, 2009 May 20 doi:10.1088/0004-637X/697/1/1 C 2009. The American Astronomical Society. All rights reserved. Printed in the U.S.A. TRANSIENT LUNAR PHENOMENA: REGULARITY AND REALITY Arlin P. S. Crotts Department of Astronomy, Columbia University, Columbia Astrophysics Laboratory, 550 West 120th Street, New York, NY 10027, USA Received 2007 June 27; accepted 2009 February 20; published 2009 April 30 ABSTRACT Transient lunar phenomena (TLPs) have been reported for centuries, but their nature is largely unsettled, and even their existence as a coherent phenomenon is controversial. Nonetheless, TLP data show regularities in the observations; a key question is whether this structure is imposed by processes tied to the lunar surface, or by terrestrial atmospheric or human observer effects. I interrogate an extensive catalog of TLPs to gauge how human factors determine the distribution of TLP reports. The sample is grouped according to variables which should produce differing results if determining factors involve humans, and not reflecting phenomena tied to the lunar surface. Features dependent on human factors can then be excluded. Regardless of how the sample is split, the results are similar: ∼50% of reports originate from near Aristarchus, ∼16% from Plato, ∼6% from recent, major impacts (Copernicus, Kepler, Tycho, and Aristarchus), plus several at Grimaldi. Mare Crisium produces a robust signal in some cases (however, Crisium is too large for a “feature” as defined). TLP count consistency for these features indicates that ∼80% of these may be real. Some commonly reported sites disappear from the robust averages, including Alphonsus, Ross D, and Gassendi. -

A Zircon U-Pb Study of the Evolution of Lunar KREEP
A zircon U-Pb study of the evolution of lunar KREEP By A.A. Nemchin, R.T. Pidgeon, M.J. Whitehouse, J.P. Vaughan and C. Meyer Abstract SIMS U-Pb analyses show that zircons from breccias from Apollo 14 and Apollo 17 have essentially identical age distributions in the range 4350 to 4200 Ma but, whereas Apollo 14 zircons additionally show ages from 4200 to 3900 Ma, the Apollo 17 samples have no zircons with ages <4200 Ma. The zircon results also show an uneven distribution with distinct peaks of magmatic activity. In explaining these observations we propose that periodic episodes of KREEP magmatism were generated from a primary reservoir of KREEP magma, which contracted over time towards the centre of Procellarum KREEP terrane. Introduction One of the most enigmatic features of the geology of the Moon is the presence of high concentrations of large ion lithophile elements in clasts from breccias from non mare regions. This material, referred to as KREEP (1) from its high levels of K, REE and P, also contains relatively high concentrations of other incompatible elements including Th, U and Zr. Fragments of rocks with KREEP trace element signatures have been identified in samples from all Apollo landing sites (2). The presence of phosphate minerals, such as apatite and merrillite (3); zirconium minerals, such as zircon (4), zirconolite (5) and badelleyite (6), and rare earth minerals such as yttrobetafite (7), are direct expressions of the presence of KREEP. Dickinson and Hess (8) concluded that about 9000 ppm of Zr in basaltic melt is required to saturate it with zircon at about 1100oC (the saturation concentration increases exponentially with increasing temperature). -

A Guideline for a Sustainable Lunar Base Design for Constructed in Lunar Lava Tubes and Their Vertical Skylights
50th International Conference on Environmental Systems ICES-2021-186 12-15 July 2021 A Guideline for a Sustainable Lunar Base Design for Constructed in Lunar Lava Tubes and Their Vertical Skylights Masato Sakurai1, Asuka Shima2, Isao Kawano3, Junichi Haruyama4 Japan Aerospace Exploration Agency (JAXA), Chofu-shi, Tokyo, 182-8522, Japan. and Hiroyuki Miyajima5 International University of Health and Welfare, Narita Campus 1, 4-3, Kōzunomori, Narita, Chiba, 286-8686 Japan The lunar surface is a hostile environment subject to harmful radiation and meteorite impacts. A recently discovered lava tube avoids these risks and, as it undergoes only slight temperature changes, it is a promising location for constructing a lunar base. JAXA engages in research in regenerative ECLSS (Environmental Control Life Support Systems), particularly addressing water and air recycling and treating organic waste. Overcoming these challenges is essential for long-term lunar habitation. This paper presents a guideline for a sustainable lunar base design. Nomenclature ECLSS = Environmental Control Life Support System HTV = H-II Transfer Vehicle ISS = International Space Station JAXA = Japan Aerospace Exploration Agency JSASS = Japan Society for Aeronautical and Space Science MHH = Marius Hills Hole MIH = Mare Ingenii Hole MTH = Mare Tranquillitatis Hole SELENE = Selenological and Engineering Explorer UZUME = Unprecedented Zipangu Underworld of the Moon Exploration (name of the research group for vertical holes) SDGs = Sustainable Development Goals SELENE = Selenological and Engineering Explorer I. Introduction uture space exploration will extend beyond low Earth orbit and dramatically expand in scope. In particular, F industrial activities are planned for the Moon with the development of infrastructure that includes lunar bases. This paper summarizes our study of the construction of a crewed permanent settlement, which will be essential to support long-term habitation, resource utilization, and industrial activities on the Moon. -

Rideshare and the Orbital Maneuvering Vehicle: the Key to Low-Cost Lagrange-Point Missions
SSC15-II-5 Rideshare and the Orbital Maneuvering Vehicle: the Key to Low-cost Lagrange-point Missions Chris Pearson, Marissa Stender, Christopher Loghry, Joe Maly, Valentin Ivanitski Moog Integrated Systems 1113 Washington Avenue, Suite 300, Golden, CO, 80401; 303 216 9777, extension 204 [email protected] Mina Cappuccio, Darin Foreman, Ken Galal, David Mauro NASA Ames Research Center PO Box 1000, M/S 213-4, Moffett Field, CA 94035-1000; 650 604 1313 [email protected] Keats Wilkie, Paul Speth, Trevor Jackson, Will Scott NASA Langley Research Center 4 West Taylor Street, Mail Stop 230, Hampton, VA, 23681; 757 864 420 [email protected] ABSTRACT Rideshare is a well proven approach, in both LEO and GEO, enabling low-cost space access through splitting of launch charges between multiple passengers. Demand exists from users to operate payloads at Lagrange points, but a lack of regular rides results in a deficiency in rideshare opportunities. As a result, such mission architectures currently rely on a costly dedicated launch. NASA and Moog have jointly studied the technical feasibility, risk and cost of using an Orbital Maneuvering Vehicle (OMV) to offer Lagrange point rideshare opportunities. This OMV would be launched as a secondary passenger on a commercial rocket into Geostationary Transfer Orbit (GTO) and utilize the Moog ESPA secondary launch adapter. The OMV is effectively a free flying spacecraft comprising a full suite of avionics and a propulsion system capable of performing GTO to Lagrange point transfer via a weak stability boundary orbit. In addition to traditional OMV ’tug’ functionality, scenarios using the OMV to host payloads for operation at the Lagrange points have also been analyzed. -
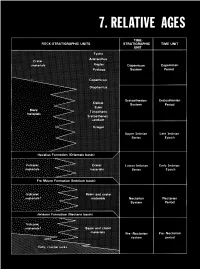
Relative Ages
CONTENTS Page Introduction ...................................................... 123 Stratigraphic nomenclature ........................................ 123 Superpositions ................................................... 125 Mare-crater relations .......................................... 125 Crater-crater relations .......................................... 127 Basin-crater relations .......................................... 127 Mapping conventions .......................................... 127 Crater dating .................................................... 129 General principles ............................................. 129 Size-frequency relations ........................................ 129 Morphology of large craters .................................... 129 Morphology of small craters, by Newell J. Fask .................. 131 D, method .................................................... 133 Summary ........................................................ 133 table 7.1). The first three of these sequences, which are older than INTRODUCTION the visible mare materials, are also dominated internally by the The goals of both terrestrial and lunar stratigraphy are to inte- deposits of basins. The fourth (youngest) sequence consists of mare grate geologic units into a stratigraphic column applicable over the and crater materials. This chapter explains the general methods of whole planet and to calibrate this column with absolute ages. The stratigraphic analysis that are employed in the next six chapters first step in reconstructing -

NASA Langley Research Center Dedicated As Vertical Flight Heritage Site N Friday, May 8 (The W
NASA Langley Research Center Dedicated as Vertical Flight Heritage Site n Friday, May 8 (the W. F. Durand. The paper states day after Forum 71), “The gravest charge against ONASA Langley Research the helicopter is its lack of hosted a ceremony for the means of making a safe recognition of the Center as descent when the engine has an AHS International Vertical stopped.” It disproved two Flight Heritage Site. The common misperceptions that ceremony featured remarks the parachute effect of the by NASA Administrator, stopped blades or the blades Charles Bolden; Associate spinning backwards could Administrator for Aeronautics, create a safe landing. It then Jaiwon Shin; Acting Center provided a mathematical Director Dave Bowles; US treatment of the principle Congressman Scott Rigell (via of autorotation. This video); the Honorable George principle was later to be a Wallace, Mayor of the City of major feature in Juan de la Hampton; and AHS Executive Cierva’s autogyro work and, Director Mike Hirschberg. Sikorsky YR-4B in the NACA Langley Full Scale Wind Tunnel in 1944. (All eventually, in satisfactory NASA debuted a photos courtesy of NASA) helicopter behavior following historical overview video of a power failure. This 1920 NASA Langley’s rotorcraft be dedicated since AHS began the technical publication even contributions created specifically for the Vertical Flight Heritage Sites Program demonstrated some understanding of event. Administrator Bolden predicted in 2013. The initiative is intended to twist and rotor inflow considerations. the impact that vertical flight aircraft recognize and help preserve sites of Throughout the years, Langley would have on relieving ground traffic the most noteworthy and significant researchers continued exploring the congestion in the future, citing the long contributions made in both the theory complex problem of vertical flight. -

A Compressive-Sensing-Based Approach to Reconstruct Regolith Structure from Lunar Penetrating Radar Data at the Chang’E-3 Landing Site
remote sensing Article A Compressive-Sensing-Based Approach to Reconstruct Regolith Structure from Lunar Penetrating Radar Data at the Chang’E-3 Landing Site Kun Wang 1,2 , Zhaofa Zeng 1,2,*, Ling Zhang 1,2, Shugao Xia 3 and Jing Li 1,2 1 College of Geo-Exploration Science and Technology, Jilin University, Changchun 130026, China; [email protected] (K.W.); [email protected] (L.Z.); [email protected] (J.L.) 2 Key Laboratory of Applied Geophysics, Ministry of Natural Resources of PRC, Changchun 130026, China 3 Delaware State University, Dover, DE 19901, USA ; [email protected] * Correspondence: [email protected] Received: 18 October 2018; Accepted: 27 November 2018; Published: 30 November 2018 Abstract: Lunar Penetrating Radar (LPR) is one of the important scientific systems onboard the Yutu lunar rover for the purpose of detecting the lunar regolith and the subsurface geologic structures of the lunar regolith, providing the opportunity to map the subsurface structure and vertical distribution of the lunar regolith with a high resolution. In this paper, in order to improve the capability of identifying response signals caused by discrete reflectors (such as meteorites, basalt debris, etc.) beneath the lunar surface, we propose a compressive sensing (CS)-based approach to estimate the amplitudes and time delays of the radar signals from LPR data. In this approach, the total-variation (TV) norm was used to estimate the signal parameters by a set of Fourier series coefficients. For this, we chose a nonconsecutive and random set of Fourier series coefficients to increase the resolution of the underlying target signal. -
Npl Fact Sheets (Initial Title)
Region 3: Mid-Atlantic Region Hazardous Site Cleanup Division Serving: Delaware, District of Columbia, Maryland, Pennsylvania, Virginia, West Virginia Recent Additions | Contact Us | Print Version Search: EPA Home > OSWER Home > Region 3 HSCD > Virginia Superfund Sites > Langley Air Force Base > Current Site Information Superfund Current Site Information (NPL Pad) Brownfields / Redevelopment Langley Air Force Base / NASA Langley Initiatives Research Center Administrative Record EPA Region 3 EPA ID# VA2800005033 Last Update: May 2000 Virginia Risk Assessment / Hampton 2nd Congressional District Other Names: None RBC Tables Resources / State Links Current Site Status Specialist Listing Several sites are currently in the remedial investigation/feasibility study (RI/FS) stage. Records of Decision have been signed by Oil Pollution NASA and the EPA for the Area E Warehouse Operable Unit (OU) and the Tabbs Creek OU. Two Records of Decision have been Freedom of signed for the LAFB. Dredging of soils contaminated with PCBs Information Act (Polychlorinated Biphenyls) and PCTs (Polychlorinated Terphenyls) Requests (FOIA) along Tabbs Creek began in December 1999 and should take six to eight months to complete. Site Description The Langley Air Force Base (LAFB)/NASA Langley Research Center (NASA LaRC) site in Hampton, Virginia consists of two Federal facilities. LAFB covers 3,152 acres, has been an airfield and aeronautical research center since 1917, and is the home base for the First Fighter Wing. NASA LaRC is consists of 787 acres and is a research facility that conducts numerous operations in nearly 200 buildings and 40 wind tunnels. Wastes generated at LAFB include petroleum, oils and lubricants, fuels, solvents, paints, pesticides, photographic chemicals, polychlorinated biphenyls (PCBs), polyaromatic hydrocarbons (PAHs) and heavy metals.