6 Measuring Performance
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Comprehensive Review for Central Processing Unit Scheduling Algorithm
IJCSI International Journal of Computer Science Issues, Vol. 10, Issue 1, No 2, January 2013 ISSN (Print): 1694-0784 | ISSN (Online): 1694-0814 www.IJCSI.org 353 A Comprehensive Review for Central Processing Unit Scheduling Algorithm Ryan Richard Guadaña1, Maria Rona Perez2 and Larry Rutaquio Jr.3 1 Computer Studies and System Department, University of the East Caloocan City, 1400, Philippines 2 Computer Studies and System Department, University of the East Caloocan City, 1400, Philippines 3 Computer Studies and System Department, University of the East Caloocan City, 1400, Philippines Abstract when an attempt is made to execute a program, its This paper describe how does CPU facilitates tasks given by a admission to the set of currently executing processes is user through a Scheduling Algorithm. CPU carries out each either authorized or delayed by the long-term scheduler. instruction of the program in sequence then performs the basic Second is the Mid-term Scheduler that temporarily arithmetical, logical, and input/output operations of the system removes processes from main memory and places them on while a scheduling algorithm is used by the CPU to handle every process. The authors also tackled different scheduling disciplines secondary memory (such as a disk drive) or vice versa. and examples were provided in each algorithm in order to know Last is the Short Term Scheduler that decides which of the which algorithm is appropriate for various CPU goals. ready, in-memory processes are to be executed. Keywords: Kernel, Process State, Schedulers, Scheduling Algorithm, Utilization. 2. CPU Utilization 1. Introduction In order for a computer to be able to handle multiple applications simultaneously there must be an effective way The central processing unit (CPU) is a component of a of using the CPU. -

The Different Unix Contexts
The different Unix contexts • User-level • Kernel “top half” - System call, page fault handler, kernel-only process, etc. • Software interrupt • Device interrupt • Timer interrupt (hardclock) • Context switch code Transitions between contexts • User ! top half: syscall, page fault • User/top half ! device/timer interrupt: hardware • Top half ! user/context switch: return • Top half ! context switch: sleep • Context switch ! user/top half Top/bottom half synchronization • Top half kernel procedures can mask interrupts int x = splhigh (); /* ... */ splx (x); • splhigh disables all interrupts, but also splnet, splbio, splsoftnet, . • Masking interrupts in hardware can be expensive - Optimistic implementation – set mask flag on splhigh, check interrupted flag on splx Kernel Synchronization • Need to relinquish CPU when waiting for events - Disk read, network packet arrival, pipe write, signal, etc. • int tsleep(void *ident, int priority, ...); - Switches to another process - ident is arbitrary pointer—e.g., buffer address - priority is priority at which to run when woken up - PCATCH, if ORed into priority, means wake up on signal - Returns 0 if awakened, or ERESTART/EINTR on signal • int wakeup(void *ident); - Awakens all processes sleeping on ident - Restores SPL a time they went to sleep (so fine to sleep at splhigh) Process scheduling • Goal: High throughput - Minimize context switches to avoid wasting CPU, TLB misses, cache misses, even page faults. • Goal: Low latency - People typing at editors want fast response - Network services can be latency-bound, not CPU-bound • BSD time quantum: 1=10 sec (since ∼1980) - Empirically longest tolerable latency - Computers now faster, but job queues also shorter Scheduling algorithms • Round-robin • Priority scheduling • Shortest process next (if you can estimate it) • Fair-Share Schedule (try to be fair at level of users, not processes) Multilevel feeedback queues (BSD) • Every runnable proc. -
Chapter 1: Computer Abstractions and Technology 1.6 – 1.7: Performance and Power
Chapter 1: Computer Abstractions and Technology 1.6 – 1.7: Performance and power ITSC 3181 Introduction to Computer Architecture https://passlaB.githuB.io/ITSC3181/ Department of Computer Science Yonghong Yan [email protected] https://passlab.github.io/yanyh/ Lectures for Chapter 1 and C Basics Computer Abstractions and Technology • Lecture 01: Chapter 1 – 1.1 – 1.4: Introduction, great ideas, Moore’s law, aBstraction, computer components, and program execution • Lecture 02: C Basics; Memory and Binary Systems • Lecture 03: Number System, Compilation, Assembly, Linking and Program Execution ☛• Lecture 04: Chapter 1 – 1.6 – 1.7: Performance, power and technology trends • Lecture 05: – 1.8 - 1.9: Multiprocessing and Benchmarking 2 § 1.6 Performance 1.6 Defining Performance • Which airplane has the best performance? Boeing 777 Boeing 777 Boeing 747 Boeing 747 BAC/Sud BAC/Sud Concorde Concorde Douglas Douglas DC- DC-8-50 8-50 0 100 200 300 400 500 0 2000 4000 6000 8000 10000 Passenger Capacity Cruising Range (miles) Boeing 777 Boeing 777 Boeing 747 Boeing 747 BAC/Sud BAC/Sud Concorde Concorde Douglas Douglas DC- DC-8-50 8-50 0 500 1000 1500 0 100000 200000 300000 400000 Cruising Speed (mph) Passengers x mph 3 Response Time and Throughput • Response time çè Latency – How long it takes to do a task • Throughput çè Bandwidth – Total work done per unit time • e.g., tasks/transactions/… per hour • How are response time and throughput affected by – Replacing the processor with a faster version? – Adding more processors? • We’ll focus on response time for now… 4 Relative Performance • Define Performance = 1/Execution Time • “X is n time faster than Y”, i.e. -

45-Year CPU Evolution: One Law and Two Equations
45-year CPU evolution: one law and two equations Daniel Etiemble LRI-CNRS University Paris Sud Orsay, France [email protected] Abstract— Moore’s law and two equations allow to explain the a) IC is the instruction count. main trends of CPU evolution since MOS technologies have been b) CPI is the clock cycles per instruction and IPC = 1/CPI is the used to implement microprocessors. Instruction count per clock cycle. c) Tc is the clock cycle time and F=1/Tc is the clock frequency. Keywords—Moore’s law, execution time, CM0S power dissipation. The Power dissipation of CMOS circuits is the second I. INTRODUCTION equation (2). CMOS power dissipation is decomposed into static and dynamic powers. For dynamic power, Vdd is the power A new era started when MOS technologies were used to supply, F is the clock frequency, ΣCi is the sum of gate and build microprocessors. After pMOS (Intel 4004 in 1971) and interconnection capacitances and α is the average percentage of nMOS (Intel 8080 in 1974), CMOS became quickly the leading switching capacitances: α is the activity factor of the overall technology, used by Intel since 1985 with 80386 CPU. circuit MOS technologies obey an empirical law, stated in 1965 and 2 Pd = Pdstatic + α x ΣCi x Vdd x F (2) known as Moore’s law: the number of transistors integrated on a chip doubles every N months. Fig. 1 presents the evolution for II. CONSEQUENCES OF MOORE LAW DRAM memories, processors (MPU) and three types of read- only memories [1]. The growth rate decreases with years, from A. -

Cuda C Best Practices Guide
CUDA C BEST PRACTICES GUIDE DG-05603-001_v9.0 | June 2018 Design Guide TABLE OF CONTENTS Preface............................................................................................................ vii What Is This Document?..................................................................................... vii Who Should Read This Guide?...............................................................................vii Assess, Parallelize, Optimize, Deploy.....................................................................viii Assess........................................................................................................ viii Parallelize.................................................................................................... ix Optimize...................................................................................................... ix Deploy.........................................................................................................ix Recommendations and Best Practices.......................................................................x Chapter 1. Assessing Your Application.......................................................................1 Chapter 2. Heterogeneous Computing.......................................................................2 2.1. Differences between Host and Device................................................................ 2 2.2. What Runs on a CUDA-Enabled Device?...............................................................3 Chapter 3. Application Profiling............................................................................. -
Clock Rate Improves Roughly Proportional to Improvement in L • Number of Transistors Improves Proportional to L2 (Or Faster)
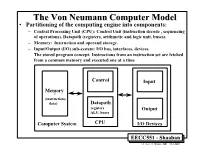
TheThe VonVon NeumannNeumann ComputerComputer ModelModel • Partitioning of the computing engine into components: – Central Processing Unit (CPU): Control Unit (instruction decode , sequencing of operations), Datapath (registers, arithmetic and logic unit, buses). – Memory: Instruction and operand storage. – Input/Output (I/O) sub-system: I/O bus, interfaces, devices. – The stored program concept: Instructions from an instruction set are fetched from a common memory and executed one at a time Control Input Memory - (instructions, data) Datapath registers Output ALU, buses Computer System CPU I/O Devices EECC551 - Shaaban #1 Lec # 1 Winter 2001 12-3-2001 Generic CPU Machine Instruction Execution Steps Instruction Obtain instruction from program storage Fetch Instruction Determine required actions and instruction size Decode Operand Locate and obtain operand data Fetch Execute Compute result value or status Result Deposit results in storage for later use Store Next Determine successor or next instruction Instruction EECC551 - Shaaban #2 Lec # 1 Winter 2001 12-3-2001 HardwareHardware ComponentsComponents ofof AnyAny ComputerComputer Five classic components of all computers: 1. Control Unit; 2. Datapath; 3. Memory; 4. Input; 5. Output } Processor Computer Keyboard, Mouse, etc. Processor Memory Devices (active) (passive) Control Input (where Unit programs, data Disk Datapath live when Output running) Display, Printer, etc. EECC551 - Shaaban #3 Lec # 1 Winter 2001 12-3-2001 CPUCPU OrganizationOrganization • Datapath Design: – Capabilities & performance characteristics of principal Functional Units (FUs): • (e.g., Registers, ALU, Shifters, Logic Units, ...) – Ways in which these components are interconnected (buses connections, multiplexors, etc.). – How information flows between components. • Control Unit Design: – Logic and means by which such information flow is controlled. – Control and coordination of FUs operation to realize the targeted Instruction Set Architecture to be implemented (can either be implemented using a finite state machine or a microprogram). -

Comparing Systems Using Sample Data
Operating System and Process Monitoring Tools Arik Brooks, [email protected] Abstract: Monitoring the performance of operating systems and processes is essential to debug processes and systems, effectively manage system resources, making system decisions, and evaluating and examining systems. These tools are primarily divided into two main categories: real time and log-based. Real time monitoring tools are concerned with measuring the current system state and provide up to date information about the system performance. Log-based monitoring tools record system performance information for post-processing and analysis and to find trends in the system performance. This paper presents a survey of the most commonly used tools for monitoring operating system and process performance in Windows- and Unix-based systems and describes the unique challenges of real time and log-based performance monitoring. See Also: Table of Contents: 1. Introduction 2. Real Time Performance Monitoring Tools 2.1 Windows-Based Tools 2.1.1 Task Manager (taskmgr) 2.1.2 Performance Monitor (perfmon) 2.1.3 Process Monitor (pmon) 2.1.4 Process Explode (pview) 2.1.5 Process Viewer (pviewer) 2.2 Unix-Based Tools 2.2.1 Process Status (ps) 2.2.2 Top 2.2.3 Xosview 2.2.4 Treeps 2.3 Summary of Real Time Monitoring Tools 3. Log-Based Performance Monitoring Tools 3.1 Windows-Based Tools 3.1.1 Event Log Service and Event Viewer 3.1.2 Performance Logs and Alerts 3.1.3 Performance Data Log Service 3.2 Unix-Based Tools 3.2.1 System Activity Reporter (sar) 3.2.2 Cpustat 3.3 Summary of Log-Based Monitoring Tools 4. -

A Simple Chargeback System for SAS® Applications Running on UNIX and Linux Servers
SAS Global Forum 2007 Systems Architecture Paper: 194-2007 A Simple Chargeback System For SAS® Applications Running on UNIX and Linux Servers Michael A. Raithel, Westat, Rockville, MD Abstract Organizations that run SAS on UNIX and Linux servers often have a need to measure overall SAS usage and to charge the projects and users who utilize the servers. This allows an organization to pay for the hardware, software, and labor necessary to maintain and run these types of shared servers. However, performance management and accounting software is normally expensive. Purchasing such software, configuring it, and managing it may be prohibitive in terms of cost and in terms of having staff with the right skill sets to do so. Consequently, many organizations with UNIX or Linux servers do not have a reliable way to measure the overall use of SAS software and to charge individuals and projects for its use. This paper presents a simple methodology for creating a chargeback system on UNIX and Linux servers. It uses basic accounting programs found in the UNIX and Linux operating systems, and exploits them using SAS software. The paper presents an overview of the UNIX/Linux “sa” command and the basic accounting system. Then, it provides a SAS program that utilizes this command to capture and store monthly SAS usage statistics. The paper presents a second SAS program that reads the monthly SAS usage SAS data set and creates both a chargeback report and a general usage report. After reading this paper, you should be able to easily adapt the sample SAS programs to run on servers in your own environment. -

Atmega165p Datasheet
Features • High Performance, Low Power Atmel® AVR® 8-Bit Microcontroller • Advanced RISC Architecture – 130 Powerful Instructions – Most Single Clock Cycle Execution – 32 × 8 General Purpose Working Registers – Fully Static Operation – Up to 16 MIPS Throughput at 16 MHz – On-Chip 2-cycle Multiplier • High Endurance Non-volatile Memory segments – 16 Kbytes of In-System Self-programmable Flash program memory – 512 Bytes EEPROM – 1 Kbytes Internal SRAM 8-bit – Write/Erase cyles: 10,000 Flash/100,000 EEPROM(1)(3) – Data retention: 20 years at 85°C/100 years at 25°C(2)(3) Microcontroller – Optional Boot Code Section with Independent Lock Bits In-System Programming by On-chip Boot Program with 16K Bytes True Read-While-Write Operation – Programming Lock for Software Security In-System • JTAG (IEEE std. 1149.1 compliant) Interface – Boundary-scan Capabilities According to the JTAG Standard Programmable – Extensive On-chip Debug Support – Programming of Flash, EEPROM, Fuses, and Lock Bits through the JTAG Interface Flash • Peripheral Features – Two 8-bit Timer/Counters with Separate Prescaler and Compare Mode – One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and Capture Mode – Real Time Counter with Separate Oscillator –Four PWM Channels ATmega165P – 8-channel, 10-bit ADC – Programmable Serial USART ATmega165PV – Master/Slave SPI Serial Interface – Universal Serial Interface with Start Condition Detector – Programmable Watchdog Timer with Separate On-chip Oscillator – On-chip Analog Comparator Preliminary – Interrupt and Wake-up -

Performance of a Computer (Chapter 4) Vishwani D
ELEC 5200-001/6200-001 Computer Architecture and Design Fall 2013 Performance of a Computer (Chapter 4) Vishwani D. Agrawal & Victor P. Nelson epartment of Electrical and Computer Engineering Auburn University, Auburn, AL 36849 ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 1 What is Performance? Response time: the time between the start and completion of a task. Throughput: the total amount of work done in a given time. Some performance measures: MIPS (million instructions per second). MFLOPS (million floating point operations per second), also GFLOPS, TFLOPS (1012), etc. SPEC (System Performance Evaluation Corporation) benchmarks. LINPACK benchmarks, floating point computing, used for supercomputers. Synthetic benchmarks. ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 2 Small and Large Numbers Small Large 10-3 milli m 103 kilo k 10-6 micro μ 106 mega M 10-9 nano n 109 giga G 10-12 pico p 1012 tera T 10-15 femto f 1015 peta P 10-18 atto 1018 exa 10-21 zepto 1021 zetta 10-24 yocto 1024 yotta ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 3 Computer Memory Size Number bits bytes 210 1,024 K Kb KB 220 1,048,576 M Mb MB 230 1,073,741,824 G Gb GB 240 1,099,511,627,776 T Tb TB ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 4 Units for Measuring Performance Time in seconds (s), microseconds (μs), nanoseconds (ns), or picoseconds (ps). Clock cycle Period of the hardware clock Example: one clock cycle means 1 nanosecond for a 1GHz clock frequency (or 1GHz clock rate) CPU time = (CPU clock cycles)/(clock rate) Cycles per instruction (CPI): average number of clock cycles used to execute a computer instruction. -

Chap01: Computer Abstractions and Technology
CHAPTER 1 Computer Abstractions and Technology 1.1 Introduction 3 1.2 Eight Great Ideas in Computer Architecture 11 1.3 Below Your Program 13 1.4 Under the Covers 16 1.5 Technologies for Building Processors and Memory 24 1.6 Performance 28 1.7 The Power Wall 40 1.8 The Sea Change: The Switch from Uniprocessors to Multiprocessors 43 1.9 Real Stuff: Benchmarking the Intel Core i7 46 1.10 Fallacies and Pitfalls 49 1.11 Concluding Remarks 52 1.12 Historical Perspective and Further Reading 54 1.13 Exercises 54 CMPS290 Class Notes (Chap01) Page 1 / 24 by Kuo-pao Yang 1.1 Introduction 3 Modern computer technology requires professionals of every computing specialty to understand both hardware and software. Classes of Computing Applications and Their Characteristics Personal computers o A computer designed for use by an individual, usually incorporating a graphics display, a keyboard, and a mouse. o Personal computers emphasize delivery of good performance to single users at low cost and usually execute third-party software. o This class of computing drove the evolution of many computing technologies, which is only about 35 years old! Server computers o A computer used for running larger programs for multiple users, often simultaneously, and typically accessed only via a network. o Servers are built from the same basic technology as desktop computers, but provide for greater computing, storage, and input/output capacity. Supercomputers o A class of computers with the highest performance and cost o Supercomputers consist of tens of thousands of processors and many terabytes of memory, and cost tens to hundreds of millions of dollars. -
Multi-Cycle Datapathoperation
Book's Definition of Performance • For some program running on machine X, PerformanceX = 1 / Execution timeX • "X is n times faster than Y" PerformanceX / PerformanceY = n • Problem: – machine A runs a program in 20 seconds – machine B runs the same program in 25 seconds 1 Example • Our favorite program runs in 10 seconds on computer A, which hasa 400 Mhz. clock. We are trying to help a computer designer build a new machine B, that will run this program in 6 seconds. The designer can use new (or perhaps more expensive) technology to substantially increase the clock rate, but has informed us that this increase will affect the rest of the CPU design, causing machine B to require 1.2 times as many clockcycles as machine A for the same program. What clock rate should we tellthe designer to target?" • Don't Panic, can easily work this out from basic principles 2 Now that we understand cycles • A given program will require – some number of instructions (machine instructions) – some number of cycles – some number of seconds • We have a vocabulary that relates these quantities: – cycle time (seconds per cycle) – clock rate (cycles per second) – CPI (cycles per instruction) a floating point intensive application might have a higher CPI – MIPS (millions of instructions per second) this would be higher for a program using simple instructions 3 Performance • Performance is determined by execution time • Do any of the other variables equal performance? – # of cycles to execute program? – # of instructions in program? – # of cycles per second? – average # of cycles per instruction? – average # of instructions per second? • Common pitfall: thinking one of the variables is indicative of performance when it really isn’t.