Vertical Separation Minimum Between FL 290 and FL 410 Inclusive
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Supporting the Future Air Traffic Control Projection Process
t Supporting the Future Air Traffic Control Projection Process Hayley J. Davison & R John Hansman, Jr. International Centerfor Air Transportation Massachusetts Institute of Technology Cambridge, MA USA ABSTRACT traffic systems that are being designed for the In air traffic control, projecting what the air traffic future. situation will be over the next 30 seconds to 30 minutes is The air traffic control system is at a point of a key process in identifying conflicts that may arise so transition that could potentially change the that evasive action can be taken upon discovery of these conflicts. A series of field visits in the Boston and New controller’s projection task. As the demand for York terminal radar approach control (TRACON) more fuel-efficient and environment-fnendly facilities and in the oceanic air traffic control facilities in procedures increases, there is a need for increased New York and Reylqavlk, Iceland were conducted to flexibility currently required by the FAA and other investigate the projection process in two different ATC air traffic authorities. It is critical to determine the domains. The results from the site visits suggest that two role of the existing structure in the airspace and types of projection are currently used in ATC tasks, procedures in the controller’s projection task before depending on the type of separation minima and/or traffic it is removed or changed. restriction and information display used by the controller. As technologies improve and procedures change, care One example of a procedure increasing route should be taken by designers to support projection flexibility is the constant deceleration approach through displays, automation, and procedures. -

Wake Turbulence Mitigation for Arrivals (Wtma)
26TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES WAKE TURBULENCE MITIGATION FOR ARRIVALS (WTMA) Daniel Williams, Gary Lohr NASA Langley Research Center, Hampton, Virginia, USA Keywords: Wake, Vortex, Turbulence, CSPR, Arrivals Abstract Approach Procedures (IAPs). While instrument approaches are often used in visual conditions, The preliminary Wake Turbulence Mitigation an airport’s acceptance rate is degraded when for Arrivals (WTMA) concept of operations is the weather forces instrument-only conditions described in this paper. The WTMA concept for aircraft navigation and traffic separation, and provides further detail to work initiated by the ATC must control aircraft according to radar Wake Vortex Avoidance System Concept and wake separation standards. Evaluation Team and is an evolution of the This paper includes a background of the Wake Turbulence Mitigation for Departure current or state-of-the-art of operational concept. Anticipated benefits about reducing procedures including applicable research, and wake turbulence separation standards in cross- then provides a description of the WTMA wind conditions, and candidate WTMA system concept and system architecture considerations considerations are discussed. to improve those procedures for NextGen traffic projections. Finally future research efforts and 1 Introduction/Background recommendations are described. The authors are passionate about supporting operators with The current air traffic system is not prepared for appropriate technology and procedures, so this the two- to three-fold increase in traffic paper includes that perspective. projected for the 2025 time-frame [1]. Current system limitations, procedures, and the absence of automation-based tools define a highly 1.1 CSPR Description constrained environment. To cope with future Closely Spaced Parallel Runways (CSPRs) are traffic demands, fundamental changes are defined as runways whose centerlines are required to effectively manage traffic and separated by less than 2500’ [3]. -

Las Vegas, USA, March 14-18, 2016
INTERNATIONAL FEDERATION OF AIR TRAFFIC CONTROLLERS’ ASSOCIATIONS 55TH ANNUAL CONFERENCE – Las Vegas, USA, March 14-18, 2016 Agenda Item: C.6.11 IFATCA 16 WP No. 310 Separation in Class E Airspace Presented by PLC Summary Class E Airspace is the lowest class of controlled airspace. Controlled doesn't mean visual flight rules (VFR) traffic has to be in radio contact with air traffic control (ATC), but that ATC services are available within the capabilities of radar and radio equipment. Instrument flight rules (IFR) traffic is required to contact ATC for a clearance. This is general-purpose airspace and aircraft flying under VFR can fly more-or-less wherever they want (weather permitting) and IFR traffic operates under positive control by ATC. There are regulations in this airspace but they aren't onerous, and they're designed to accommodate the variety of aircraft and activities that can be found here. Although Class E airspace is a single class of airspace, there are tighter regulations above 10,000 feet, where there are no airspeed restrictions (other than the prohibition on supersonic flight over land) compared to lower altitudes where airspeeds are limited to 250 knots. 1. Introduction 1.1. This paper was requested by Germany at the 2015 Conference in Sofia. The purpose of this paper is to look at Class E Airspace: who is responsible for separation and what would the legal implications be in the event of an incident or accident that occurred in Class E Airspace. 1.2. Airspace is an area of aeronautical knowledge that is commonly poorly demonstrated in practical tests. -
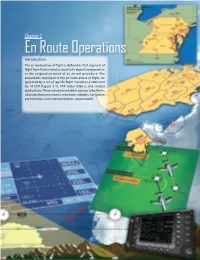
Chapter: 2. En Route Operations
Chapter 2 En Route Operations Introduction The en route phase of flight is defined as that segment of flight from the termination point of a departure procedure to the origination point of an arrival procedure. The procedures employed in the en route phase of flight are governed by a set of specific flight standards established by 14 CFR [Figure 2-1], FAA Order 8260.3, and related publications. These standards establish courses to be flown, obstacle clearance criteria, minimum altitudes, navigation performance, and communications requirements. 2-1 fly along the centerline when on a Federal airway or, on routes other than Federal airways, along the direct course between NAVAIDs or fixes defining the route. The regulation allows maneuvering to pass well clear of other air traffic or, if in visual meteorogical conditions (VMC), to clear the flightpath both before and during climb or descent. Airways Airway routing occurs along pre-defined pathways called airways. [Figure 2-2] Airways can be thought of as three- dimensional highways for aircraft. In most land areas of the world, aircraft are required to fly airways between the departure and destination airports. The rules governing airway routing, Standard Instrument Departures (SID) and Standard Terminal Arrival (STAR), are published flight procedures that cover altitude, airspeed, and requirements for entering and leaving the airway. Most airways are eight nautical miles (14 kilometers) wide, and the airway Figure 2-1. Code of Federal Regulations, Title 14 Aeronautics and Space. flight levels keep aircraft separated by at least 500 vertical En Route Navigation feet from aircraft on the flight level above and below when operating under VFR. -

Aircraft Wake Turbulence
AERONAUTICAL AUSTRALIA INFORMATION AERONAUTICAL INFORMATION SERVICE CIRCULAR (AIC) AIRSERVICES AUSTRALIA GPO BOX 367, CANBERRA ACT 2601 Phone: 02 6268 4874 Email: [email protected] H30/17 Effective: 201710200300 UTC AIRCRAFT WAKE TURBULENCE 1. INTRODUCTION 1.1 This AIC provides basic information on wake vortex behaviour, alerts pilots to the hazards of aircraft wake turbulence, and recommends operational procedures to avoid or deal with wake turbulence encounters. 2. WHAT IS WAKE TURBULENCE? 2.1 All aircraft generate wake vortices, also known as wake turbulence. When an aircraft is flying, there is an increase in pressure below the wing and a decrease in pressure on the top of the aerofoil. Therefore, at the tip of the wing, there is a differential pressure that concentrates the roll up of the airflow aft of the wing tip. Limited smaller vortex swirls exist also for the same reason at the tips of the flaps. Behind the aircraft all these small vortices mix together and roll up into two main vortices turning in opposite directions, clockwise behind the left wing (seen from behind) and anti-clockwise behind the right one wing (see Figure 1). 3. CHARACTERISTICS OF WAKE VORTICES 3.1 Wake vortex generation begins when the nose wheel lifts off the runway on take-off and continues until the nose wheel touches down on landing. 3.2 Size: The active part of a vortex has a very small radius, not more than a few metres. However, there is a lot of energy due to the high rotation speed of the air. (AIC H30/17) Page 2 of 20 3.3 Intensity: The characteristics of the wake vortices generated by an aircraft in flight are determined initially by the aircraft’s gross weight, wingspan, aircraft configuration and attitude. -

Rules for VFR Flight
EUROCONTROL guidance notes for pilots 1. Rules for VFR Flight AIRSPACE INFRINGEMENT when aircraft are on converging courses. detailed requirements for both VFR and Infringement of controlled airspace, dan- If there is a risk of collision, both pilots IFR vary depending on the class of air- ger and restricted areas etc. is a serious must act in accordance with these space in which the aircraft is flying. aviation hazard and occurs when an air- General Rules. A pilot who is required to craft enters the airspace without permis- give way should alter course to the right, VISUAL FLIGHT RULES sion. This happens several times a day in and one who has the right of way should Internationally, a pilot is required to stay the busiest areas of European airspace. maintain course and speed, but should more than 1000 feet above any obstacles Careful planning, and accurately flying also be prepared to take avoiding action in a “congested area” or above any large the plan, are the best means of avoiding if the other does not give way. collection of people. Over uncongested such infringements. However, it is impor- areas, he or she must stay more than 500 tant that pilots understand the rules they feet above the ground. Also, loss of are expected to follow. engine power needs to be considered when operating a single engine aircraft. This is one of a series of Guidance Notes The UK is unique. In that country, pilots (GN) intended to help you keep out of following VFR may fly below 500 feet, but trouble.The others are listed at the foot of they must stay more than 500 feet away the next page. -

For Spacious Skies: Self-Separation with "Autonomous Flight Rules" in US Domestic Airspace
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/267828187 For Spacious Skies: Self-Separation with "Autonomous Flight Rules" in US Domestic Airspace Article · September 2011 DOI: 10.2514/6.2011-6865 CITATIONS READS 18 123 2 authors: David J. Wing William B Cotton NASA 8 PUBLICATIONS 35 CITATIONS 80 PUBLICATIONS 590 CITATIONS SEE PROFILE SEE PROFILE Some of the authors of this publication are also working on these related projects: Traffic Complexity Management View project AFR (Autonomous Flight Rules) View project All content following this page was uploaded by David J. Wing on 02 April 2015. The user has requested enhancement of the downloaded file. For Spacious Skies: Self-Separation with “Autonomous Flight Rules” in US Domestic Airspace David J. Wing1 NASA Langley Research Center, Hampton, VA, 23681 William B. Cotton2 National Institute of Aerospace, Hampton, VA, 23666 Autonomous Flight Rules (AFR) are proposed as a new set of operating regulations in which aircraft navigate on tracks of their choice while self-separating from traffic and weather. AFR would exist alongside Instrument and Visual Flight Rules (IFR and VFR) as one of three available flight options for any appropriately trained and qualified operator with the necessary certified equipment. Historically, ground-based separation services evolved by necessity as aircraft began operating in the clouds and were unable to see each other. Today, technologies for global precision navigation, emerging airborne surveillance, and onboard computing enable traffic conflict management to be fully integrated with navigation procedures onboard the aircraft. By self-separating, aircraft can operate with more flexibility and fewer flight restrictions than are required when using ground-based separation. -
Pilot and Air Traffic Controller Guide to Wake Turbulence (This Page Intentionally Left Blank)
SECTION 2 2 Pilot and Air Traffic Controller Guide to Wake Turbulence (This page intentionally left blank) 2.ii SECTION 2 Pilot and Air Traffic Controller Guide to Wake Turbulence Table of Contents 2 Section Page 2.0 Introduction .......................................................................................................................... 2.1 2.0.1 Preview .......................................................................................................................... 2.1 2.0.2 The Goal........................................................................................................................ 2.1 2.0.3 Participants and Review Process ................................................................................... 2.1 2.1 Objectives ............................................................................................................................. 2.2 2.2 Historical Examination of the Wake-Turbulence Hazard..................................................... 2.3 2.3 Review of Accidents and Incidents ...................................................................................... 2.5 2.4 Description/Characteristics of the Wake-Turbulence Hazard .............................................. 2.8 2.4.1 Wake-Turbulence Formation......................................................................................... 2.8 2.4.2 Velocity Flow Field ....................................................................................................... 2.9 2.4.3 The Hazard ................................................................................................................. -
BENEFITS ANALYSIS of Space-Based ADS-B
BENEFITS ANALYSIS OF Space-Based ADS-B JUNE 2016 Benefits Analysis of Space-Based ADS-B June 2016 Page 1 of 37 Executive Summary Introduction The purpose of this report is to provide an overview of the benefits of automatic dependent surveillance–broadcast (ADS-B) satellite-based navigation with space-based ADS-B networks in the context of the safety challenges of managing predicted air traffic growth in commercial air transport over the next 20 years. Growth in the number of airline destinations, routes flown and volume of aircraft operating at any one time — combined with important safety, efficiency and environment targets — will continue to drive innovation in air traffic management. As the aviation industry responds to these demands, an essential safety enabler will be technologies that take a global and regional approach to harmonization and standardization. Context The size of the forecast growth in this sector of aviation has significant implications for the entire world aviation system. This growth represents a particular challenge for air traffic management to ensure more aircraft are handled safely and efficiently in what will increasingly become constrained airspace. Safety Benefits of space-based ADS-B Space-based ADS-B will extend today’s ADS-B Out technology from flight operations in continental airspace to oceanic and remote airspace, enabling any aircraft’s position and other data, determined via satellite-based navigation, to be broadcast periodically to ground stations, and to become an integral part of responding to the entire global airspace system’s capacity and efficiency challenges. The International Civil Aviation Organization believes that ADS-B will eventually become the preferred surveillance technology worldwide1. -
(ADS-B) Flight Operations Information Package
Automatic Dependent Surveillance Broadcast (ADS-B) Flight Operations Information Package ADS-B Flight Operations Information Package About this information package ADS-B provides a highly accurate and effective means for air traffic controllers to provide air traffic surveillance services outside of radar coverage. The objective of this interactive package is to provide information to assist in the development of the pilot and dispatcher training programs necessary to support Automatic Dependent Surveillance Broadcast (ADS-B) services in Australia. ADS-B Flight Operations Information Package About this information package While Airservices Australia has taken reasonable steps to ensure the accuracy of this information, Airservices Australia makes no warranty or representation that it is accurate. Information required for operational or commercial purposes must be checked against the appropriate sources. ADS-B Flight Operations Information Package About this information package For convenience,this information package contains a number of links to websites where more relevant information can be obtained. If running this program online, or from CD or hard drive whilst connected to the internet, clicking these links will take you out of this package and directly to the relevant web page. Some linked pages are not under the control of Airservices Australia. Airservices Australia is not responsible for the content of any external linked site, or any changes or updates to such sites. ADS-B Flight Operations Information Package Additional ADS-B Education Material An additional source of ADS-B education material is an information booklet published by the Civil Aviation Safety Authority (CASA). This booklet is available on-line at: http://www.casa.gov.au/wcmswr/_ assets/main/pilots/download/ads-b.pdf ADS-B Flight Operations Information Package ADS-B Flight Operations Information Package Part 1 – Overview Part 2 – Operating Procedures and Services Select a section above or click to start from the beginning. -

GAO-19-532, AIR TRAFFIC CONTROL: FAA's Analysis of Costs
United States Government Accountability Office Report to the Committee on Transportation and Infrastructure, House of Representatives July 2019 AIR TRAFFIC CONTROL FAA’s Analysis of Costs and Benefits Drove Its Plans to Improve Surveillance in U.S. Oceanic Airspace GAO-19-532 July 2019 AIR TRAFFIC CONTROL FAA’s Analysis of Costs and Benefits Drove Its Plans to Improve Surveillance in U.S. Oceanic Airspace Highlights of GAO-19-532, a report to the Committee on Transportation and Infrastructure, House of Representatives Why GAO Did This Study What GAO Found Recent developments in surveillance The Federal Aviation Administration (FAA) evaluated two aircraft surveillance technologies, which provide an technologies that would allow aircraft to safely fly in closer proximity while in aircraft’s location to air traffic oceanic airspace. Based on its evaluation, FAA committed to using one in the controllers, have the potential to near term and to continue to study another for future use. Specifically, in April improve air traffic operations over the 2019, FAA committed to implement by 2022 new international standards that oceans. FAA has explored how to allow reduced distances between aircraft, called minimum separation standards. improve surveillance capabilities in These reduced distances would be enabled by a surveillance technology known U.S. oceanic airspace to take as enhanced Automatic Dependent Surveillance-Contract (ADS-C). FAA also advantage of new international decided to continue studying the use of another enhanced surveillance separation standards that could lead to technology known as space-based Automatic Dependent Surveillance-Broadcast the more efficient use of this airspace. (ADS-B)—to further improve surveillance in U.S. -

Cockpit Display Based Visual Separation During an Instrument
MTR 03W0000030 MITRE TECHNICAL REPORT Cockpit Display Based Visual Separation during an Instrument Approach: Effect of Traffic Display Size and Location Cockpit Display of Traffic Information (CDTI) Enhanced Flight Rules (CEFR) Simulation 2 June 2003 Randall S. Bone John Helleberg David A. Domino Nancy Johnson, San Jose State University Approved for public release, distribution unlimited. ©2003 The MITRE Corporation. All Rights Reserved. Center for Advanced Aviation System Development McLean, Virginia The contents of this material reflect the views of the author and/or the Director of the Center for Advanced Aviation System Development. Neither the Federal Aviation Administration nor the Department of Transportation makes any warranty or guarantee, or promise, expressed or implied, concerning the content or accuracy of the views expressed herein. MITRE Department and Project Approval: James K. Reagan Abstract At many busy airports maximum efficiency and minimum delay occur when visual approaches are being conducted by pilots using visual separation from traffic for a portion of the approach. Pilot willingness to accept responsibility for visual separation also affords controllers maximum flexibility in traffic management under conditions of high traffic load. It may be possible to extend that efficiency to lower weather conditions if pilots are able to perform similar tasks by reference to a Cockpit Display of Traffic Information (CDTI) in lieu of visual contact out-the-window. This concept is termed CDTI Enhanced Flight Rules (CEFR). CEFR procedures may be applicable during visual or instrument approaches, this study examined the instrument approach application with particular attention to the pilot acceptability of different CDTI locations and sizes.