Generation of Polyhedral Delaunay Meshes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Computational Design Framework 3D Graphic Statics
Computational Design Framework for 3D Graphic Statics 3D Graphic for Computational Design Framework Computational Design Framework for 3D Graphic Statics Juney Lee Juney Lee Juney ETH Zurich • PhD Dissertation No. 25526 Diss. ETH No. 25526 DOI: 10.3929/ethz-b-000331210 Computational Design Framework for 3D Graphic Statics A thesis submitted to attain the degree of Doctor of Sciences of ETH Zurich (Dr. sc. ETH Zurich) presented by Juney Lee 2015 ITA Architecture & Technology Fellow Supervisor Prof. Dr. Philippe Block Technical supervisor Dr. Tom Van Mele Co-advisors Hon. D.Sc. William F. Baker Prof. Allan McRobie PhD defended on October 10th, 2018 Degree confirmed at the Department Conference on December 5th, 2018 Printed in June, 2019 For my parents who made me, for Dahmi who raised me, and for Seung-Jin who completed me. Acknowledgements I am forever indebted to the Block Research Group, which is truly greater than the sum of its diverse and talented individuals. The camaraderie, respect and support that every member of the group has for one another were paramount to the completion of this dissertation. I sincerely thank the current and former members of the group who accompanied me through this journey from close and afar. I will cherish the friendships I have made within the group for the rest of my life. I am tremendously thankful to the two leaders of the Block Research Group, Prof. Dr. Philippe Block and Dr. Tom Van Mele. This dissertation would not have been possible without my advisor Prof. Block and his relentless enthusiasm, creative vision and inspiring mentorship. -
Volumes of Polyhedra in Hyperbolic and Spherical Spaces
Volumes of polyhedra in hyperbolic and spherical spaces Alexander Mednykh Sobolev Institute of Mathematics Novosibirsk State University Russia Toronto 19 October 2011 Alexander Mednykh (NSU) Volumes of polyhedra 19October2011 1/34 Introduction The calculation of the volume of a polyhedron in 3-dimensional space E 3, H3, or S3 is a very old and difficult problem. The first known result in this direction belongs to Tartaglia (1499-1557) who found a formula for the volume of Euclidean tetrahedron. Now this formula is known as Cayley-Menger determinant. More precisely, let be an Euclidean tetrahedron with edge lengths dij , 1 i < j 4. Then V = Vol(T ) is given by ≤ ≤ 01 1 1 1 2 2 2 1 0 d12 d13 d14 2 2 2 2 288V = 1 d 0 d d . 21 23 24 1 d 2 d 2 0 d 2 31 32 34 1 d 2 d 2 d 2 0 41 42 43 Note that V is a root of quadratic equation whose coefficients are integer polynomials in dij , 1 i < j 4. ≤ ≤ Alexander Mednykh (NSU) Volumes of polyhedra 19October2011 2/34 Introduction Surprisely, but the result can be generalized on any Euclidean polyhedron in the following way. Theorem 1 (I. Kh. Sabitov, 1996) Let P be an Euclidean polyhedron. Then V = Vol(P) is a root of an even degree algebraic equation whose coefficients are integer polynomials in edge lengths of P depending on combinatorial type of P only. Example P1 P2 (All edge lengths are taken to be 1) Polyhedra P1 and P2 are of the same combinatorial type. -
Unit 6 Visualising Solid Shapes(Final)
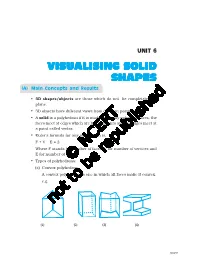
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

Motions and Stresses of Projected Polyhedra
Motions and Stresses of Projected Polyhedra by Walter Whiteley* R&urn& Topologie Structuraie #7, 1982 Abstract Structural Topology #7,1982 L’utilisation de mouvements infinitesimaux de structures a panneaux permet Using infinitesimal motions of panel structures, a new proof is given for Clerk d’apporter une nouvelle preuve au theoreme de Clerk Maxwell affirmant que la Maxwell’s theorem that the projection of an oriented polyhedron from 3-space projection d’un polyedre de I’espace a 3 dimensions donne un diagramme plane gives a plane diagram of lines and points which forms a stressed bar and joint de lignes et de points qui forme une charpente contrainte a barres et a joints. framework. The methods extend to prove a simple converse for frameworks Les methodes tendent a prouver une reciproque simple pour les charpentes a with planar graphs - and a general converse for other polyhedra under appropriate graphes planaires - et une reciproque g&&ale pour ,les autres polyedres soumis conditions on the stress. The method of proof also yields a correspondence bet- a des conditions appropriees de contraintes. La methode utilisee pour la preuve ween the form of the stress on a bar (tension/compression) and the form of the pro&it aussi une correspondance entre la forme de la contrainte sur une bar dihedral angle (concave/convex). (tension/compression) et la forme de I’angle diedrique (concave/convexe). Les resultats ont une applicatioin potentielle a la fois sur I’etude des charpentes The results have potential application both to the study of frameworks and to et sur I’analyse de la scene (la reconnaissance d’images de polyedres). -
![Arxiv:1403.3190V4 [Gr-Qc] 18 Jun 2014 ‡ † ∗ Stefloig H Oetintr Ftehmloincon Hamiltonian the of [16]](https://docslib.b-cdn.net/cover/6577/arxiv-1403-3190v4-gr-qc-18-jun-2014-stefloig-h-oetintr-ftehmloincon-hamiltonian-the-of-16-926577.webp)
Arxiv:1403.3190V4 [Gr-Qc] 18 Jun 2014 ‡ † ∗ Stefloig H Oetintr Ftehmloincon Hamiltonian the of [16]
A curvature operator for LQG E. Alesci,∗ M. Assanioussi,† and J. Lewandowski‡ Institute of Theoretical Physics, University of Warsaw (Instytut Fizyki Teoretycznej, Uniwersytet Warszawski), ul. Ho˙za 69, 00-681 Warszawa, Poland, EU We introduce a new operator in Loop Quantum Gravity - the 3D curvature operator - related to the 3-dimensional scalar curvature. The construction is based on Regge Calculus. We define this operator starting from the classical expression of the Regge curvature, we derive its properties and discuss some explicit checks of the semi-classical limit. I. INTRODUCTION Loop Quantum Gravity [1] is a promising candidate to finally realize a quantum description of General Relativity. The theory presents two complementary descriptions based on the canon- ical and the covariant approach (spinfoams) [2]. The first implements the Dirac quantization procedure [3] for GR in Ashtekar-Barbero variables [4] formulated in terms of the so called holonomy-flux algebra [1]: one considers smooth manifolds and defines a system of paths and dual surfaces over which the connection and the electric field can be smeared. The quantiza- tion of the system leads to the full Hilbert space obtained as the projective limit of the Hilbert space defined on a single graph. The second is instead based on the Plebanski formulation [5] of GR, implemented starting from a simplicial decomposition of the manifold, i.e. restricting to piecewise linear flat geometries. Even if the starting point is different (smooth geometry in the first case, piecewise linear in the second) the two formulations share the same kinematics [6] namely the spin-network basis [7] first introduced by Penrose [8]. -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals. -
Step 1: 3D Shapes
Year 1 – Autumn Block 3 – Shape Step 1: 3D Shapes © Classroom Secrets Limited 2018 Introduction Match the shape to its correct name. A. B. C. D. E. cylinder square- cuboid cube sphere based pyramid © Classroom Secrets Limited 2018 Introduction Match the shape to its correct name. A. B. C. D. E. cube sphere square- cylinder cuboid based pyramid © Classroom Secrets Limited 2018 Varied Fluency 1 True or false? The shape below is a cone. © Classroom Secrets Limited 2018 Varied Fluency 1 True or false? The shape below is a cone. False, the shape is a triangular-based pyramid. © Classroom Secrets Limited 2018 Varied Fluency 2 Circle the correct name of the shape below. cylinder pyramid cuboid © Classroom Secrets Limited 2018 Varied Fluency 2 Circle the correct name of the shape below. cylinder pyramid cuboid © Classroom Secrets Limited 2018 Varied Fluency 3 Which shape is the odd one out? © Classroom Secrets Limited 2018 Varied Fluency 3 Which shape is the odd one out? The cuboid is the odd one out because the other shapes are cylinders. © Classroom Secrets Limited 2018 Varied Fluency 4 Follow the path of the cuboids to make it through the maze. Start © Classroom Secrets Limited 2018 Varied Fluency 4 Follow the path of the cuboids to make it through the maze. Start © Classroom Secrets Limited 2018 Reasoning 1 The shapes below are labelled. Spot the mistake. A. B. C. cone cuboid cube Explain your answer. © Classroom Secrets Limited 2018 Reasoning 1 The shapes below are labelled. Spot the mistake. A. B. C. cone cuboid cube Explain your answer. -

Computer-Aided Design Disjointed Force Polyhedra
Computer-Aided Design 99 (2018) 11–28 Contents lists available at ScienceDirect Computer-Aided Design journal homepage: www.elsevier.com/locate/cad Disjointed force polyhedraI Juney Lee *, Tom Van Mele, Philippe Block ETH Zurich, Institute of Technology in Architecture, Block Research Group, Stefano-Franscini-Platz 1, HIB E 45, CH-8093 Zurich, Switzerland article info a b s t r a c t Article history: This paper presents a new computational framework for 3D graphic statics based on the concept of Received 3 November 2017 disjointed force polyhedra. At the core of this framework are the Extended Gaussian Image and area- Accepted 10 February 2018 pursuit algorithms, which allow more precise control of the face areas of force polyhedra, and conse- quently of the magnitudes and distributions of the forces within the structure. The explicit control of the Keywords: polyhedral face areas enables designers to implement more quantitative, force-driven constraints and it Three-dimensional graphic statics expands the range of 3D graphic statics applications beyond just shape explorations. The significance and Polyhedral reciprocal diagrams Extended Gaussian image potential of this new computational approach to 3D graphic statics is demonstrated through numerous Polyhedral reconstruction examples, which illustrate how the disjointed force polyhedra enable force-driven design explorations of Spatial equilibrium new structural typologies that were simply not realisable with previous implementations of 3D graphic Constrained form finding statics. ' 2018 Elsevier Ltd. All rights reserved. 1. Introduction such as constant-force trusses [6]. However, in 3D graphic statics using polyhedral reciprocal diagrams, the influence of changing Recent extensions of graphic statics to three dimensions have the geometry of the force polyhedra on the force magnitudes is shown how the static equilibrium of spatial systems of forces not as direct or intuitive. -

A Method for Predicting Multivariate Random Loads and a Discrete Approximation of the Multidimensional Design Load Envelope
International Forum on Aeroelasticity and Structural Dynamics IFASD 2017 25-28 June 2017 Como, Italy A METHOD FOR PREDICTING MULTIVARIATE RANDOM LOADS AND A DISCRETE APPROXIMATION OF THE MULTIDIMENSIONAL DESIGN LOAD ENVELOPE Carlo Aquilini1 and Daniele Parisse1 1Airbus Defence and Space GmbH Rechliner Str., 85077 Manching, Germany [email protected] Keywords: aeroelasticity, buffeting, combined random loads, multidimensional design load envelope, IFASD-2017 Abstract: Random loads are of greatest concern during the design phase of new aircraft. They can either result from a stationary Gaussian process, such as continuous turbulence, or from a random process, such as buffet. Buffet phenomena are especially relevant for fighters flying in the transonic regime at high angles of attack or when the turbulent, separated air flow induces fluctuating pressures on structures like wing surfaces, horizontal tail planes, vertical tail planes, airbrakes, flaps or landing gear doors. In this paper a method is presented for predicting n-dimensional combined loads in the presence of massively separated flows. This method can be used both early in the design process, when only numerical data are available, and later, when test data measurements have been performed. Moreover, the two-dimensional load envelope for combined load cases and its discretization, which are well documented in the literature, are generalized to n dimensions, n ≥ 3. 1 INTRODUCTION The main objectives of this paper are: 1. To derive a method for predicting multivariate loads (but also displacements, velocities and accelerations in terms of auto- and cross-power spectra, [1, pp. 319-320]) for aircraft, or parts of them, subjected to a random excitation. -

A Remark on Spaces of Flat Metrics with Cone Singularities of Constant Sign
A remark on spaces of flat metrics with cone singularities of constant sign curvatures Fran¸cois Fillastre and Ivan Izmestiev v2 November 12, 2018 Keywords: Flat metrics, convex polyhedra, mixed volumes, Minkowski space, covolume Abstract By a result of W. P. Thurston, the moduli space of flat metrics on the sphere with n cone singularities of prescribed positive curvatures is a complex hyperbolic orbifold of dimension n−3. The Hermitian form comes from the area of the metric. Using geometry of Euclidean polyhedra, we observe that this space has a natural decomposition into 1 real hyperbolic convex polyhedra of dimensions n − 3 and ≤ 2 (n − 1). By a result of W. Veech, the moduli space of flat metrics on a compact surface with cone singularities of prescribed negative curvatures has a foliation whose leaves have a local structure of complex pseudo-spheres. The complex structure comes again from the area of the metric. The form can be degenerate; its signature depends on the curvatures prescribed. Using polyhedral surfaces in Minkowski space, we show that this moduli space has a natural decomposition into spherical convex polyhedra. Contents 1 Flat metrics 1 1.1 Positivecurvatures ................................. 2 1.2 Negativecurvatures ................................ 4 2 Spaces of polygons 5 3 Boundary area of a convex polytope 8 4 Boundary area of convex bodies 11 5 Alternative argument for the signature of the area form 13 arXiv:1702.02114v2 [math.DG] 16 Nov 2017 6 Fuchsian convex polyhedra 13 7 Area form on Fuchsian convex bodies 16 7.1 First argument: mimicking the convex bodies case . ... 16 7.2 Second argument: explicit formula for the area . -

Optimization of Tensegrity Lattice with Truncated Octahedral Units
OptimizationM. Ohsaki, J. Y. of Zhang, tensegrity K. Kogiso lattice andwith J. truncated J. Rimoli octahedral units Proceedings of the IASS Annual Symposium 2019 – Structural Membranes 2019 Form and Force 7 – 10 October 2019, Barcelona, Spain C. Lázaro, K.-U. Bletzinger, E. Oñate (eds.) Optimization of tensegrity lattice with truncated octahedral units Makoto OHSAKI∗a, Jingyao ZHANGa, Kosuke KOGISOa, Julian J. RIMOLIc *aDepartment of Architecture and Architectural Engineering, Kyoto University Kyoto-Daigaku Katsura, Nishikyo, Kyoto 615-8540, Japan [email protected] b School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, GA 30332, USA Abstract An optimization method is presented for tensegrity lattices composed of eight truncated octahedral units. The stored strain energy under specified forced vertical displacement is maximized under constraint on the structural material volume. The nonlinear behavior of bars allowing buckling is modeled as a bi- linear elastic material. As a result of optimization, a flexible structure with degrading vertical stiffness is obtained to be applicable to an energy absorption device or a vertical isolation system. Keywords: tensegrity, optimization, strain energy, truncated octahedral unit 1. Introduction Tensegrity structures are a class of self-standing pin jointed structures consisting of thin bars (struts) and cables stiffened by applying prestresses to their members [1, 3]. Because the bars are not continuously connected, i.e., they are topologically isolated from each other, these structures are usually too flexible to be used as load-resisting components of structures in mechanical and civil engineering applications. However, by exploiting their flexibility, tensegrity structures can be utilized as devices for reducing impact forces, isolating dynamic forces, and absorbing energy, to name a few applications [5]. -

19. Three-Dimensional Figures
19. Three-Dimensional Figures Exercise 19A 1. Question Write down the number of faces of each of the following figures: A. Cuboid B. Cube C. Triangular prism D. Square pyramid E. Tetrahedron Answer A. 6 Face is also known as sides. A Cuboid has six faces. Book, Matchbox, Brick etc. are examples of Cuboid. B.6 A Cube has six faces and all faces are equal in length. Sugar Cubes, Dice etc. are examples of Cube. C. 5 A Triangular prism has two triangular faces and three rectangular faces. D. 5 A Square pyramid has one square face as a base and four triangular faces as the sides. So, Square pyramid has total five faces. E. 4 A Tetrahedron (Triangular Pyramid) has one triangular face as a base and three triangular faces as the sides. So, Tetrahedron has total four faces. 2. Question Write down the number of edges of each of the following figures: A. Tetrahedron B. Rectangular pyramid C. Cube D. Triangular prism Answer A. 6 A Tetrahedron has six edges. OA, OB, OC, AB, AC, BC are the 6 edges. B. 8 A Rectangular Pyramid has eight edges. AB, BC, CD, DA, OA, OB, DC, OD are the 8 edges. C. 12 A Cube has twelve edges. AB, BC, CD, DA, EF, FG, GH, HE, AE, DH, BF, CG are the edges. D. 9 A Triangular prism has nine edges. AB, BC, CA, DE, EF, FD, AD, BE, CF are the9 edges. 3. Question Write down the number of vertices of each of the following figures: A.