Propulsion and Thrusters
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Study of the Twin Fin Concept for Cruise Ship Applications
Centre for Naval Architecture A Study of the Twin Fin Concept for Cruise Ship Applications Frida Nyström [email protected] Master of Science Thesis KTH Stockholm, Sweden June 2015 Abstract The aim with this thesis is to investigate if the Twin Fin concept can be a beneficial propulsion system for large cruise ships, about 300 m long. The Twin Fin concept is a new propulsion system, launched in 2014 by Caterpillar Propulsion [1]. The concept is diesel-electric and has two fins, containing a gearbox and an electric motor, immersed in water [2]. Previous investigations have shown the concept to have several advantages compared to other propulsion systems . A seismic vessel, Polarcus, has been retrofitted with the Twin Fin concept and it has been proved to have both operating and cost benefits compared to its previous arrangement with azimuth thrusters [3]. Diesel-electric propulsion is common for cruise ships, which would make the Twin Fin concept a possible propulsion solution for them. It’s of interest to investigate if the concept can be as beneficial for large cruise ship as it has shown to be for other vessel types. To investigate this the whole concept is considered. A cruise ship hull and fins are modeled with computer-aided design (CAD) using CAESES/FRIENDSHIP- Framework (CAESES/FFW), starting building up a procedure for customization of fin design into ship layout. Tracking of the operation of similar cruise ships is performed with automatic identification system (AIS) in order to create an operational profile for the model cruise ship. A propeller is designed for the model cruise ship, using a Caterpillar Propulsion in-house software. -

PDF Success Story, Adventure of the Seas
ABB, Marine & Ports, Marine Services ABB’s modernization on Adventure of the Seas increases the lifetime of the vessel and secures the operational reliability. Increasing lifetime of the vessel, securing discussions about life cycle status and ABB’s solution presentations to improve the situation. The actual project was operational reliability, and enhancing the executed in eight months, which is exceptionally short for such maintainability of the vessel. an extensive project. All the works at dry dock were completed 1 day earlier than Success by collaboration scheduled and transfer trial from Grand Bahamas to Puerto Modernization scope Rico was possible to start earlier. That allowed ABB to test and The modernization project on Adventure of the Seas included tune the system to perfection without time pressure, even the upgrade of the existing PSR Cycloconverter Drive control though in normal case 48 hours of testing time is suitable. All platform to the AMC34 platform as well as the upgrade of the the sea trial tests and tuning of the new control systems were existing AC110 propulsion control platform to AC800M executed on transfer trial without need of additional sea trials. propulsion control platform. In addition to the material supply, the overall ABB scope of supply included installation work, commissioning phase and The vessel testing. Even with a tight schedule and shortened timeline ABB Adventure of the Seas was delivered in 2001 in Kvaerner Masa- was able to complete this pilot project successfully. The project Yards in Turku, Finland (today known as Meyer Turku Shipyard). team worked seamlessly together in Marine and Ports Finland, She is operated by Royal Caribbean International (RCI), and is getting support and assistance from the local ABB units in the the third vessel of the Voyager class. -

Veth Rudder Propellers Toturn Yourworld the Power
VETH RUDDER PROPELLERS TO TURN YOUR WORLD YOUR TURN TO THE POWER POWER THE BY About Veth Propulsion Veth Propulsion, by Twin Disc, is a customer-oriented Dutch thruster manufacturer. A family-owned company, established in Papendrecht in the Netherlands in 1951, and international player which is leading in quality, service, innovation and sustainability. Veth Propulsion develops and produces various types of Your requirements are our starting point to entering into a Z-drives, including retractable thrusters, Hybrid Drives, Swing relationship. Due of the wide range of products, combined Outs and deck mounted units. You can find the Veth Rudder with the expertise of our staff and our innovative designs, you propeller everywhere, from inland marine to tug and offshore can always expect a total concept. vessels. The type of Z-drive that best suits your needs, depends on factors such as the type of vessel you have and the desired You can also choose to have the drive line delivered with your maneuverability. It revolves around what you consider to be rudder propeller or thruster. As a leading Scania and Sisu Diesel important! dealer, Veth Propulsion delivers new and remanufactured propulsion engines (variable speed) and generator engines You can expect a personal and down-to-earth approach and a (set and variable speed). reliable image and brand awareness in several marine markets. Your sailing profile and specific needs form the basis for our Relying on our expertise and decades of experience, we can bespoke solutions including rudder propellers, bow thrusters, give you advice on the most suitable solution and possibilities. -

Date: April 22, 2003 Trip Report to Northern Europe for National
Date: April 22, 2003 Subject: Trip Report to Northern Europe for National Science Foundation project From: Richard P. Voelker Chief, Advanced Technology Office of Shipbuilding and Marine Technology To: Joseph A. Byrne Director Office of Shipbuilding and Marine Technology During March 12-27, I traveled with representatives of the National Science Foundation (Alexander Sutherland), Raytheon Polar Services Corporation (Paul Olsgaard) and Science and Technology Corporation (James St. John and Aleksandr Iyerusalimskiy) to Finland, Sweden and Germany. The purpose of the trip was to gain insight into the design and operation of their national icebreakers, many of which incorporate innovative concepts. Visits were made to the Finnish Maritime Administration (Markku Mylly) and their icebreaker BOTNICA, the Swedish Maritime Administration (Anders Backman) and their icebreaker ODEN, and the German Alfred Wegener Institute for Polar and Marine Research (Eberhard Fahrbach). Information was also obtained on the new Swedish icebreaker class VIKING and the German polar research vessel POLARSTERN. Attachment A provides some of the notes from our visit while Attachment B contains a discussion on some elements of the technical specification for the new generation research/icebreaker vessel. The trip was very valuable and provided a great start to the feasibility-level design study that MARAD has been contracted to perform for the NSF. A presentation describing this trip and some interim results from the feasibility-level design study will be made in mid-May to interested MAR-760 members. # Attachment A – Notes from the visit ---------- Briefing by Paavo Lohi - Aker Finnyards, builder of BOTNICA The bow skeg or bilge keels do not affect the flow of ice around the hull. -

DYNAMIC POSITIONING CONFERENCE October 10-11, 2017
Author’s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 Thrusters Influence of Thruster Response Time on DP Capability by Time-Domain Simulations D. Jürgens, M. Palm Voith Turbo, Heidenheim, Germany D. Jürgens, M. Palm Influence of Thruster Response Time on DP Capability Abstract Due to their simplicity static approaches are a commonly used method of assessing the DP capability of offshore vessels. These static approaches are essentially based on a balance of forces and moments caused by environmental conditions, as well as the thruster forces. The ensuing DP plots usually come up with unrealistically high application limits regarding admissible environmental conditions for a given operation. This phenomenon is due to the fact that important influencing factors are being neglected. One example is the assumption that the vessel is at rest and another one is the fact that the responsiveness of thrusters is not considered. With the Voith-Schneider-Propeller an alternative propulsion system for DP applications is available. It differs from conventional azimuth thrusters primarily because of its faster thrust variation and thrust change over zero position. Since static approaches completely ignore this factor, this paper intends to quantify the influences of the response time of a thruster on the wind envelope with the help of time-domain DP simulations and the ensuing capability plots. For this purpose comprehensive simulations have been carried out for an offshore support vessel while varying the dynamic thruster characteristics. Relevant assessments show that the response time has a significant influence on the DP capability and thus the operational window. -

Construction of a Hardware-In-The-Loop Simulator for Azipod Control System Testing
Markus Nylund Construction of a hardware-in-the-loop simulator for Azipod control system testing Thesis submitted for examination for the degree of Master of Science in Technology. Espoo 03.08.2016 Thesis supervisor: Prof. Seppo Ovaska Thesis advisor: D.Sc. (Tech.) Juha Orivuori Aalto-universitetet, PL 11000, 00076 AALTO www.aalto.fi Sammandrag av diplomarbete Författare Markus T. V. Nylund Titel Construction of a hardware-in-the-loop simulator for Azipod control system testing Examensprogram Utbildningsprogrammet för elektronik och elektroteknik Huvud-/biämne Elektronik med tillämpningar Kod S3007 Övervakare Prof. Seppo Ovaska Handledare TkD Juha Orivuori Datum 03.08.2016 Sidantal 9+90 Språk engelska Sammandrag Syftet med detta diplomarbete är att konstruera en simulator för Azipod® roderpropellern. Azipod® är ett varumärke av en roderpropeller med en elmotor som driver propellern. Hela roderenheten är belägen utanför fartygets skrov och det är möjligt att rotera roderpropellern obegränsat runt sin axel. Unikt för roderpropellrar är att drivkraften kan göras fullständigt elektriskt samt att roderpropellern är en dragande propeller till skillnad från tryckande konventionella propellrar. Dessa egenskaper ökar på ett fartygs energieffektivitet. Målet med arbetet är att bygga en (Azipod®) roderpropellersimulator och en tillhörande styrenhet som liknar fartygs styrenheter. Fokus för arbetet ligger på propulsionsstyrenheten. Simulatorn skall fungera liknande som den kommersiella produkten, men med mindre hårdvara. Fartygs styrkonsolpaneler samt alla nödvändiga mätinstrument virtualiseras. Ett extra program skapas för att möjliggöra stimulans för systemet för de virtualiserade mätinstrumenten. Detta program körs från en godtycklig dator som är uppkopplad till simulator nätverket. Simulering av Azipod® roderpropellern utförs av två sammankopplade motorer. Den ena motorn representerar en Azipod® rodermotor och den andra motorn belastar propulsionsmotorn. -

Problems of Handling Ships Equipped with Azipod Propulsion Systems
PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 95 Transport 2013 Lech Kobyliski Foundation for Safety of Navigation and Environment Protection PROBLEMS OF HANDLING SHIPS EQUIPPED WITH AZIPOD PROPULSION SYSTEMS The manuscript delivered, March 2013 Abstract: Large ships, mainly large cruise vessels, built during last two decades are quite often equipped with revolutionary propulsion devices known under the name AZIPODs. There are many reasons for choosing AZIPODs as main propulsion units, the main reason being excellent manoeuvring characteristics achieved. However in case of large propulsion units, having power of 15-25 MW, used for propulsion there are also some disadvantages and limitations, the last mainly related to operational factors. Handling of ships equipped with AZIPODS is different from handling conventional ships and in certain manoeuvring situations safety of the ship and of the propulsion units might be endangered.. Therefore some limitations imposed on handling procedures are necessary and it is essential that pilots and masters of ships fitted with AZIPODs must be specially trained. Keywords: ship manoeuvrability, podded propulsion, handling of ships with Azipods 1. INTRODUCTION During recent times the new type of vessel has been introduced to the world shipping fleet in large numbers. This type is passenger cruise vessel. Statistics of ships in operation and on order reveals that more than 750 ships of different size that could be defined as cruise ships are recently in operation, more than about 50 of them are large ships of more than 250 metres in length and carrying sometimes as much as 6000 passengers. According to the definition cruise ship is usually a very large passenger ship that makes a roundtrip with several en route stops and takes passengers only at the port where trip begins and ends. -

Optimal Thrust Allocation Methods for Dynamic Positioning of Ships
Delft University of Technology Faculty of Electrical Engineering, Mathematics and Computer Science Delft Institute of Applied Mathematics Optimal Thrust Allocation Methods for Dynamic Positioning of Ships A thesis submitted to the Delft Institute of Applied Mathematics in partial fulfillment of the requirements for the degree MASTER OF SCIENCE in APPLIED MATHEMATICS by CHRISTIAAN DE WIT Delft, the Netherlands July 2009 Copyright © 2009 by Christiaan de Wit. All rights reserved. MSc THESIS APPLIED MATHEMATICS “Optimal Thrust Allocation Methods for Dynamic Positioning of Ships” CHRISTIAAN DE WIT Delft University of Technology Daily supervisor Responsible professor Dr. J.W. van der Woude Prof. dr. K.I. Aardal Other thesis committee members M. Gachet, Ingenieur ENSTA Dr. R.J. Fokkink July 2009 Delft, the Netherlands Optimal Thrust Allocation Methods for Dynamic Positioning of Ships Christiaan de Wit July 2009 Environment from Abstract The first Dynamic Positioning (DP) systems emerged in the 1960’s from the need for deep water drilling by the offshore oil and gas industry, as conventional mooring systems, like a jack-up barge or an anchored rig, can only be used in shallow waters. GustoMSC has been developing DP drill ships since the early 1970’s and it is still one of their core businesses. DP systems automatically control the position and heading of a ship subjected to environmental and external forces, using its own actuators. The thrust allocator of a DP system is responsible for the thrust distribution over the actuators of the ship. Apart from minimizing the power consumption an ideal thrust allocator can also take other aspects into account, such as forbidden/spoil zones and thruster relations. -
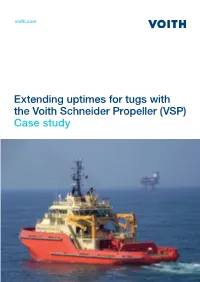
Extending Uptimes for Tugs with the Voith Schneider Propeller (VSP) Case Study SHIPBUILDING & EQUIPMENT PROPULSION & MANOEUVRING TECHNOLOGY
voith.com Extending uptimes for tugs with the Voith Schneider Propeller (VSP) Case study SHIPBUILDING & EQUIPMENT PROPULSION & MANOEUVRING TECHNOLOGY Extending uptime for tugs SEAKEEPING BEHAVIOUR Rolling movements are often the limiting factor for tug operations in waves. However, the Voith Schneider Propeller (VSP) with its fast and dynamic thrust adjustment, enables efficient active roll stabilisation and dynamic positioning (DP). This opens up new opportunities to increase the efficiency of tug operations, write Dr Dirk Jürgens and Michael Palm from Germany’s Voith GmbH. Tug rolling motions are often the limiting factor in offshore applications. While the waves counter LNG carriers from an optimal direction – from bow or stern – tugs often have to operate un- der the worst beam wave conditions. At a moderate significant wave height of Hs = 1.9m, roll angles of up to 26.7° were measured [5], with significant implica- tions for crew welfare and productivity. The VWT or RAVE Tug is a well- heberrechtlich untersagt. proven design and the Carrousel Rave Tug (CRT) [6] offers scope to deploy active Voith Roll Stabilization (VRS). As a re- sult, roll movements can be reduced con- siderably, by as much as 70% on tugs. The basis for the VRS is the fast response of the VSP [7], [8]. This article explains the effect of VRS using calculations, model tests and cus- tomer feedback as examples. The conclu- sion is that through the targeted use of Figure 1: Voith Water Tractor, Forte, equipped with two Voith Schneider Propellers (VSP36EC) VRS to reduce roll, the operating times and the electronic Voith Roll Stabilization (VRS) Source for all images and figures: Voith of offshore tugs can be significantly ex- ugs must now work in bigger waves because today’s larger vessels require Tthem to make line connections ear- lier, particularly in areas where consider- able waves build up [1]. -

Peer Review of the Finnish Shipbuilding Industry Peer Review of the Finnish Shipbuilding Industry
PEER REVIEW OF THE FINNISH SHIPBUILDING INDUSTRY PEER REVIEW OF THE FINNISH SHIPBUILDING INDUSTRY FOREWORD This report was prepared under the Council Working Party on Shipbuilding (WP6) peer review process. The opinions expressed and the arguments employed herein do not necessarily reflect the official views of OECD member countries. The report will be made available on the WP6 website: http://www.oecd.org/sti/shipbuilding. This document and any map included herein are without prejudice to the status of or sovereignty over any territory, to the delimitation of international frontiers and boundaries and to the name of any territory, city or area. © OECD 2018; Cover photo: © Meyer Turku. You can copy, download or print OECD content for your own use, and you can include excerpts from OECD publications, databases and multimedia products in your own documents, presentations, blogs, websites and teaching materials, provided that suitable acknowledgment of OECD as source and copyright owner is given. All requests for commercial use and translation rights should be submitted to [email protected]. 2 PEER REVIEW OF THE FINNISH SHIPBUILDING INDUSTRY TABLE OF CONTENTS FOREWORD ................................................................................................................................................... 2 EXECUTIVE SUMMARY ............................................................................................................................. 4 PEER REVIEW OF THE FINNISH MARITIME INDUSTRY .................................................................... -

A Methodology to Select the Electric Propulsion System for Platform Supply Vessels (PSV)
CRISTIAN ANDRÉS MORALES VÁSQUEZ A methodology to select the electric propulsion system for Platform Supply Vessels (PSV) Dissertation submitted to Escola Politécnica da Universidade de São Paulo to obtain the degree of Master of Science in Engineering. São Paulo 2014 CRISTIAN ANDRÉS MORALES VÁSQUEZ A methodology to select the electric propulsion system for Platform Supply Vessels (PSV) Dissertation submitted to Escola Politécnica da Universidade de São Paulo to obtain the degree of Master of Science in Engineering. Concentration Area: Naval Architecture and Ocean Engineering. Advisor: Prof. Dr. Helio Mitio Morishita São Paulo 2014 Este exemplar foi revisado e corrigido em relação à versão original, sob responsabilidade única do autor e com a anuência de seu orientador. São Paulo, 27 de maio de 2014. Assinatura do autor ____________________________ Assinatura do orientador _______________________ Catalogação-na-publicação Morales Vasquez, Cristian Andres A methodology to select the electric propulsion system for Platform Supply Vessels / C.A. Morales Vasquez. – versão corr. -- São Paulo, 2014. 246 p. Dissertação (Mestrado) – Escola Politécnica da Universidade de São Paulo. Departamento de Engenharia Naval e Oceânica. 1.Propulsão 2.Navios I. Universidade de São Paulo. Escola Politécnica. Departamento de Engenharia Naval e Oceânica II.t. This work is especially dedicated to my parents, Tuli Vásquez and Andrés Morales. ACKNOWLEDGMENTS I would like to express my most sincere gratitude to my advisor, Prof. Dr. Helio Mitio Morishita, for giving me the opportunity to develop my Master’s dissertation with his help and guidance, for his teachings about naval architecture and ocean engineering, for his patience and for his excellent support. Thank you very much professor. -
Azipod® Product Platform Selection Guide Preface
Azipod® Product Platform Selection Guide Preface This selection guide provides system data and information for pre- liminary project evaluation of an Azipod podded propulsion and steering system outfit. More detailed information is available in our platform-specific “Product Introduction” publications. Furthermore, our project and sales departments are available to advise on more specific questions concerning our products and regarding the instal- lation of the system components. Our product is constantly reviewed and refined according to the technology development and the needs of our customers. Therefore, we reserve the right to make changes to any data and information herein without notice. All information provided in this publication is meant to be informa- tive only. All project-specific issues shall be agreed separately and therefore any information given in this publication shall not be used as part of agreement or contract. Helsinki, August 2010 ABB Oy, Marine Merenkulkijankatu 1 / P.O. Box 185 00981 Helsinki, Finland Tel. +358 10 22 11 http://www.abb.com/marine Azipod is registered trademark of ABB Oy. © 2005 ABB Oy. All rights reserved Doc. no. 3AFV6021152 A / 24th August 2010 2 Azipod® Product Platform Selection Guide Index of items Preface 2 Index of items 3 1 General 4 1.1 Azipod propulsion and steering 4 1.2 Electric propulsion and power plant 5 2 Selecting Azipod 6 2.1 Basic standpoints 6 2.2 Azipod type codes 6 2.3 Typical contemporary power range per Azipod type 7 2.4 Available product variations 7 2.5 Examples of ship applications 7 3 Azipod product platforms 8 3.1 Azipod C series 8 3.2 Azipod V series 10 3.3 Azipod X series 12 4 Onboard remote control system 13 5 Ship design 14 5.1 Design flow 14 5.2 Hydrodynamics 14 6 Information sheet for system quotation 15 Abbreviations not clarified within the document kVA = kilovolt Amperes MW = Megawatts of power RPM = Revolutions Per Minute Azipod® Product Platform Selection Guide 3 1 General The first Azipod® installation onboard was commissioned in 1990.