Ultra Low Frequency Infrasonic Measurement System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

EHC 238 Front Pages Final.Fm
This report contains the collective views of an international group of experts and does not necessarily represent the decisions or the stated policy of the International Commission of Non- Ionizing Radiation Protection, the International Labour Organization, or the World Health Organization. Environmental Health Criteria 238 EXTREMELY LOW FREQUENCY FIELDS Published under the joint sponsorship of the International Labour Organization, the International Commission on Non-Ionizing Radiation Protection, and the World Health Organization. WHO Library Cataloguing-in-Publication Data Extremely low frequency fields. (Environmental health criteria ; 238) 1.Electromagnetic fields. 2.Radiation effects. 3.Risk assessment. 4.Envi- ronmental exposure. I.World Health Organization. II.Inter-Organization Programme for the Sound Management of Chemicals. III.Series. ISBN 978 92 4 157238 5 (NLM classification: QT 34) ISSN 0250-863X © World Health Organization 2007 All rights reserved. Publications of the World Health Organization can be obtained from WHO Press, World Health Organization, 20 Avenue Appia, 1211 Geneva 27, Switzerland (tel.: +41 22 791 3264; fax: +41 22 791 4857; e- mail: [email protected]). Requests for permission to reproduce or translate WHO publications – whether for sale or for noncommercial distribution – should be addressed to WHO Press, at the above address (fax: +41 22 791 4806; e-mail: [email protected]). The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of the World Health Organization concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries. -

Applied Engineering Using Schumann Resonance for Earthquakes Monitoring
applied sciences Article Applied Engineering Using Schumann Resonance for Earthquakes Monitoring Jose A. Gazquez 1,2, Rosa M. Garcia 1,2, Nuria N. Castellano 1,2 ID , Manuel Fernandez-Ros 1,2 ID , Alberto-Jesus Perea-Moreno 3 ID and Francisco Manzano-Agugliaro 1,* ID 1 Department Engineering, University of Almeria, CEIA3, 04120 Almeria, Spain; [email protected] (J.A.G.); [email protected] (R.M.G.); [email protected] (N.N.C.); [email protected] (M.F.-R.) 2 Research Group of Electronic Communications and Telemedicine TIC-019, 04120 Almeria, Spain 3 Department of Applied Physics, University of Cordoba, CEIA3, Campus de Rabanales, 14071 Córdoba, Spain; [email protected] * Correspondence: [email protected]; Tel.: +34-950-015396; Fax: +34-950-015491 Received: 14 September 2017; Accepted: 25 October 2017; Published: 27 October 2017 Abstract: For populations that may be affected, the risks of earthquakes and tsunamis are a major concern worldwide. Therefore, early detection of an event of this type in good time is of the highest priority. The observatories that are capable of detecting Extremely Low Frequency (ELF) waves (<300 Hz) today represent a breakthrough in the early detection and study of such phenomena. In this work, all earthquakes with tsunami associated in history and all existing ELF wave observatories currently located worldwide are represented. It was also noticed how the southern hemisphere lacks coverage in this matter. In this work, the most suitable locations are proposed to cover these geographical areas. Also, ELF data processed obtained from the observatory of the University of Almeria in Calar Alto, Spain are shown. -

Through-The-Earth Electromagnetic Trapped Miner Location Systems. a Review
Open File Report: 127-85 THROUGH-THE-EARTH ELECTROMAGNETIC TRAPPED MINER LOCATION SYSTEMS. A REVIEW By Walter E. Pittman, Jr., Ronald H. Church, and J. T. McLendon Tuscaloosa Research Center, Tuscaloosa, Ala. UNITED STATES DEPARTMENT OF THE INTERIOR BUREAU OF MINES Research at the Tuscaloosa Research Center is carried out under a memorandum of agreement between the Bureau of Mines, U. S. Department of the Interior, and the University of Alabama. CONTENTS .Page List of abbreviations ............................................. 3 Abstract .......................................................... 4 Introduction ...................................................... 4 Early efforts at through-the-earth communications ................. 5 Background studies of earth electrical phenomena .................. 8 ~ationalAcademy of Engineering recommendations ................... 10 Theoretical studies of through-the-earth transmissions ............ 11 Electromagnetic noise studies .................................... 13 Westinghouse - Bureau of Mines system ............................ 16 First phase development and testing ............................. 16 Second phase development and testing ............................ 17 Frequency-shift keying (FSK) beacon signaler .................... 19 Anomalous effects ................................................ 20 Field testing and hardware evolution .............................. 22 Research in communication techniques .............................. 24 In-mine communication systems .................................... -

The Effect of the Ionosphere on Ultra-Low-Frequency Radio-Interferometric Observations? F
A&A 615, A179 (2018) Astronomy https://doi.org/10.1051/0004-6361/201833012 & © ESO 2018 Astrophysics The effect of the ionosphere on ultra-low-frequency radio-interferometric observations? F. de Gasperin1,2, M. Mevius3, D. A. Rafferty2, H. T. Intema1, and R. A. Fallows3 1 Leiden Observatory, Leiden University, PO Box 9513, 2300 RA Leiden, The Netherlands e-mail: [email protected] 2 Hamburger Sternwarte, Universität Hamburg, Gojenbergsweg 112, 21029 Hamburg, Germany 3 ASTRON – the Netherlands Institute for Radio Astronomy, PO Box 2, 7990 AA Dwingeloo, The Netherlands Received 13 March 2018 / Accepted 19 April 2018 ABSTRACT Context. The ionosphere is the main driver of a series of systematic effects that limit our ability to explore the low-frequency (<1 GHz) sky with radio interferometers. Its effects become increasingly important towards lower frequencies and are particularly hard to calibrate in the low signal-to-noise ratio (S/N) regime in which low-frequency telescopes operate. Aims. In this paper we characterise and quantify the effect of ionospheric-induced systematic errors on astronomical interferometric radio observations at ultra-low frequencies (<100 MHz). We also provide guidelines for observations and data reduction at these frequencies with the LOw Frequency ARray (LOFAR) and future instruments such as the Square Kilometre Array (SKA). Methods. We derive the expected systematic error induced by the ionosphere. We compare our predictions with data from the Low Band Antenna (LBA) system of LOFAR. Results. We show that we can isolate the ionospheric effect in LOFAR LBA data and that our results are compatible with satellite measurements, providing an independent way to measure the ionospheric total electron content (TEC). -

An Agile Laser with Ultra-Low Frequency Noise and High Sweep Linearity
An agile laser with ultra-low frequency noise and high sweep linearity Haifeng Jiang 1,* , Fabien Kéfélian 2, Pierre Lemonde1, André Clairon 1 and Giorgio Santarelli 1 1Laboratoire National de Métrologie et d’Essais–Système de Références Temps-Espace, Observatoire de Paris, UPMC and CNRS, 61 Avenue de l’Observatoire, 75014 Paris, France 2Laboratoire de Physique des Lasers, Université Paris 13 and CNRS, 99 Avenue Jean-Baptiste Clément, 93430 Villetaneuse, France *[email protected] Abstract: We report on a fiber-stabilized agile laser with ultra-low frequency noise. The frequency noise power spectral density is comparable to that of an ultra-stable cavity stabilized laser at Fourier frequencies higher than 30 Hz. When it is chirped at a constant rate of ~ 40 MHz/s, the max non-linearity frequency error is about 50 Hz peak-to-peak over more than 600 MHz tuning range. The Rayleigh backscattering is found to be a significant frequency noise source dependent on fiber length, chirping rate and the power imbalance of the interferometer arms. We analyze this effect both theoretically and experimentally and put forward techniques to reduce this noise contribution. OCIS codes: (140.0140) Lasers and laser optics; (140.3425) Laser stabilization; (140.3518) Lasers, frequency modulated; (140.3600) Lasers, tunable; (290.5870) Scattering, Rayleigh. References and links 1. M. Harris, G. N. Pearson, J. M. Vaughan, D. Letalick, and C. Karlsson, “The role of laser coherence length in continuous-wave coherent laser radar,” J. Mod. Opt., 45 , 1567-1581, (1998). 2. R. W. Fox, C. W. Gates, and L. W. Hollberg, in Cavity-Enhanced Spectroscopies, R. -

Frequency Multiplication in Silicon Nanowires
Portland State University PDXScholar Dissertations and Theses Dissertations and Theses Summer 7-7-2016 Frequency Multiplication in Silicon Nanowires Marius Mugurel Ghita Portland State University Follow this and additional works at: https://pdxscholar.library.pdx.edu/open_access_etds Part of the Nanoscience and Nanotechnology Commons Let us know how access to this document benefits ou.y Recommended Citation Ghita, Marius Mugurel, "Frequency Multiplication in Silicon Nanowires" (2016). Dissertations and Theses. Paper 3082. https://doi.org/10.15760/etd.3077 This Dissertation is brought to you for free and open access. It has been accepted for inclusion in Dissertations and Theses by an authorized administrator of PDXScholar. Please contact us if we can make this document more accessible: [email protected]. Frequency Multiplication in Silicon Nanowires by Marius Mugurel Ghita A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Applied Physics Dissertation Committee: Raj Solanki, Chair James Morris John Freeouf Andrew Rice Portland State University 2016 ABSTRACT Frequency multiplication is an effect that arises in electronic components that exhibit a non-linear response to electromagnetic stimuli. Barriers to achieving very high frequency response from electronic devices are the device capacitance and other parasitic effects such as resistances that arise from the device geometry and are in general a function of the size of the device. In general, smaller device geometries and features lead to a faster response to electromagnetic stimuli. It was posited that the small size of the silicon nanowires (SiNWs) would lead to small device capacitance and spreading resistance, thus making the silicon nanowires useful in generating microwave and terahertz radiation by frequency multiplication. -

Passive Ultra-Low Frequency Electromagnetic Detection Coal Bed Methane Technology and Application
PASSIVE ULTRA-LOW FREQUENCY ELECTROMAGNETIC DETECTION TECHNOLOGY FOR COAL BED METHANE AND ITS APPLICATION Qin Qiming, Li Baishou, Li Peijun, Zhang Zexun, Ye Xia, Cui Rongbo School of Earth and Space Sciences, Peking University, Beijing, 100871 [email protected] KEYWORDS: Ultra-Low Frequency Electromagnetic Wave, CBM Exploration, Geophysical Method ABSTRACT: Based on analysis of the significance of the coal bed methane exploration and development and the deficiency of the conventional coal bed methane exploration methods, the paper proposes a new technology of coal bed methane exploration with natural-source (passive) ultra-low frequency electromagnetic waves. The principles of passive ultra-low frequency electromagnetic detection and the mechanism of coal bed methane exploration are first introduced. The paper then shows the coal bed methane explorationexperiments and the latest research results in the Qinshui Basin of Shanxi using BD-6-ultra-low frequency electromagnetic detector developed by Peking University. Finally, the further application of the technology in the exploration of coal bed methane is discussed. 1. INTRODUCTION methane. Based on prior knowledge, through signal parameters inversion and quantitative analysis of the electromagnetic Commonly known as gas, coal bed methane (CBM) is a spectrum, we can quickly and efficiently obtain information of unconventional natural gas. It consists mostly of methane (CH4) the spatial distribution, storage conditions and enrichment but may also contain trace amounts of carbon dioxide and/or degree of coal bed methane, then narrowing detecting target [1] nitrogen. As the CBM is flammable and explosive, it has to reduce drilling costs and improve the efficiency of drilling, to become a main bottlenecks of the safety production. -

The Role of Localized Compressional Ultra-Low Frequency Waves In
PUBLICATIONS Journal of Geophysical Research: Space Physics RESEARCH ARTICLE The Role of Localized Compressional Ultra-low Frequency 10.1002/2017JA024674 Waves in Energetic Electron Precipitation Key Points: I. Jonathan Rae1 , Kyle R. Murphy2 , Clare E. J. Watt3 , Alexa J. Halford4 , Ian R. Mann5 , • We detail a new mechanism for direct 5 2 6 7 modulation of electron precipitation Louis G. Ozeke , David G. Sibeck , Mark A. Clilverd , Craig J. Rodger , 8 1 9 via localized compressional waves Alex W. Degeling , Colin Forsyth , and Howard J. Singer • Electrons encountering a time-varying and spatially localized ULF wave can 1Department of Space and Climate Physics, Mullard Space Science Laboratory, University College London, Dorking, UK, break the third invariant 2NASA Goddard Space Flight Centre, Greenbelt, MD, USA, 3Department of Meteorology, University of Reading, Reading, UK, • This localized mechanism has not 4Space Sciences Department, The Aerospace Corporation, Chantilly, VA, USA, 5Department of Physics, University of Alberta, previously been considered and may 6 7 be important for radiation belt losses Edmonton, Alberta, Canada, British Antarctic Survey (NERC), Cambridge, UK, Department of Physics, University of Otago, Dunedin, New Zealand, 8Institute of Space Science and Physics, Shandong University, Weihai, China, 9Space Weather Prediction Center, NOAA, Boulder, CO, USA Supporting Information: • Supporting Information S1 Correspondence to: Abstract Typically, ultra-low frequency (ULF) waves have historically been invoked for radial diffusive I. J. Rae, transport leading to acceleration and loss of outer radiation belt electrons. At higher frequencies, very low [email protected] frequency waves are generally thought to provide a mechanism for localized acceleration and loss through precipitation into the ionosphere of radiation belt electrons. -

Response of Energetic Particles to Magnetospheric Ultra-Low-Frequency Waves
KAZUE TAKAHASHI RESPONSE OF ENERGETIC PARTICLES TO MAGNETOSPHERIC ULTRA-LOW-FREQUENCY WAVES Ultra-low-frequency (ULF) waves in the space physics context are the lowest-frequency plasma waves propagating in the Earth's magnetosphere. Although the propagation of the waves is explained in mag netohydrodynamic (MHD) theory, excitation of the waves involves not only MHD but also kinetic pro cesses. In this article, we describe how in situ magnetic field and particle measurements can be used to distinguish the basic properties of ULF waves, including the azimuthal wave number of the standing wave structure and the propagation direction. Examples are taken from observations with the AMPTE/CCE spacecraft. INTRODUCTION A long time ago it was realized that the geomagnetic perimentally determined. This provides a quantitative ba field as observed on the ground exhibits small-amplitude sis for testing various theories of plasma instabilities. oscillations with a period of a few minutes. 1 Since then, In this article we describe how energetic particle data the phenomenon has attracted many researchers and has combined with magnetic field data can be used to under been called by several different names, including geo stand the properties of ULF waves. In some cases, the magnetic micropulsations, magnetic pulsations, ultra particles can be treated separately from the bulk of the low-frequency (ULF) pulsations (i.e., frequencies lower plasma, and can be used as test particles probing the spa than 3 Hz), or ULF waves. In 1954, Dungey2 predicted tial and temporal structure of ULF pulsations. In that that the oscillations originate in the magnetosphere as case, the type of wave-particle interactions critically de magnetohydrodynamic (MHD) waves. -
10 Comparing Colors
Comparing Colors 10 L A B O R ATO RY 1 CLASS SESSION ACTIVITY OVERVIEW NGSS CONNECTIONS Students first observe that visible light can be separated into different colors. Students then conduct an investigation to collect evidence that indicates that different colors of light carry different amounts of energy. In their final analysis, students analyze and interpret light transmission graphs for three different sunglass lenses. They determine which sunglass lens (structure) provides the best protection (function) for the eyes. NGSS CORRELATION Performance Expectation Working towards MS-PS4-2: Develop and use a model to describe that waves are reflected, absorbed, or transmitted through various materials. Disciplinary Core Ideas MS-PS4.B.1 Electromagnetic Radiation: When light shines on an object, it is reflected, absorbed, or transmitted through the object, depending on the object’s material and the frequency (color) of the light. MS-PS4.B.3 Electromagnetic Radiation: A wave model of light is useful for explaining brightness, color, and the frequency-dependent bending of light at a surface between media. Science and Engineering Practices Planning and Carrying Out Investigations: Conduct an investigation to produce data to serve as the basis for evidence that meets the goals of an investigation. Crosscutting Concepts Structure and Function: Structures can be designed to serve particular functions by taking into account properties of different materials, and how materials can be shaped and used. WAVES 112 ACTIVITY 10 COMPARING COLORS Common Core State Standards—ELA/Literacy RST.6-8.3: Follow precisely a multistep procedure when carrying out experiments, taking measurements, or performing technical tasks. -
Natural and Man-Made Terrestrial Electromagnetic Noise: an Outlook
ANNALS OF GEOPHYSICS, VOL. 50, N. 3, June 2007 Natural and man-made terrestrial electromagnetic noise: an outlook Cesidio Bianchi and Antonio Meloni Istituto Nazionale di Geofisica e Vulcanologia, Roma, Italy Abstarct The terrestrial environment is continuously exposed to electromagnetic radiations which set up a «background» electromagnetic noise. Within the Non Ionizing Radiation band (NIR), i.e. for frequencies lower than 300 GHz, this background can have a natural or an artificial origin. Natural origins of electromagnetic radiations are gen- erally atmospheric or cosmic while artificial origins are technological applications, power transmission, commu- nications, etc. This paper briefly describes the natural and man-made electromagnetic noise in the NIR band. Natural noise comes from a large variety of sources involving different physical phenomena and covering a wide range of frequencies and showing various propagation characteristics with an extremely broad range of power levels. Due to technological growth man-made electromagnetic noise is nowadays superimposed on natural noise almost everywhere on Earth. In the last decades man-made noise has increased dramatically over and above the natural noise in residential and business areas. This increase has led some scientists to consider pos- sible negative effects of electromagnetic waves on human life and living systems in general. Accurate measure- ments of natural and man-made electromagnetic noise are necessary to understand the relative power levels in the different bands and their influence on life. Key words radio noise – background noise Different sources generate natural noise inside the magnetospheric cavity at different frequen- cies. A primary source of noise is given by the 1. -
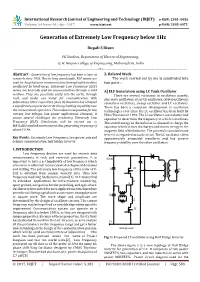
Generation of Extremely Low Frequency Below 1Hz
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395 -0056 Volume: 04 Issue: 04 | Apr -2017 www.irjet.net p-ISSN: 2395-0072 Generation of Extremely Low Frequency below 1Hz Rupali S Bisen PG Student, Department of Electrical Engineering, G. H. Raisoni college of Engineering, Maharashtra, India ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - Generation of low frequency has been a topic of 2. Related Work research since 1935. Due to long wavelength, ELF waves are The work carried out by me is subdivided into used for long distance communication through solid medium two parts :- unaffected by hindrances. Extremely Low Frequency (ELF) waves are basically used for communication through a solid A] ELF Generation using LC Tank Oscillator medium. They can penetrate easily into the earth, through There are several variations in oscillators namely, rock, and under sea water for communication with sine wave oscillators, RC or CR oscillators, crystal oscillators, submarines. Ultra-capacitors, since its invention has achieved relaxation oscillators, sweep oscillator and LC oscillators. a significant progress due to its charge holding capability over There has been a consistent development in oscillation the conventional capacitors. This makes its use possible for low technologies ever since the LC oscillator has been built by current, low voltage, low power applications. However, it Elihu Thomson in 1892. The LC oscillators use inductor and posses several challenges for producing Extremely Low capacitor to determine the frequency at which it oscillates. Frequency (ELF). Simulations will be carried out in The stored energy in the inductor is released to charge the MATLAB/simulink environment thus generating frequency of capacitor which in turn discharges and stores energy in the about 0.5 Hz.