Apollonian Ball Packings and Stacked Polytopes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intrinsic Volumes and Polar Sets in Spherical Space
1 INTRINSIC VOLUMES AND POLAR SETS IN SPHERICAL SPACE FUCHANG GAO, DANIEL HUG, ROLF SCHNEIDER Abstract. For a convex body of given volume in spherical space, the total invariant measure of hitting great subspheres becomes minimal, equivalently the volume of the polar body becomes maximal, if and only if the body is a spherical cap. This result can be considered as a spherical counterpart of two Euclidean inequalities, the Urysohn inequality connecting mean width and volume, and the Blaschke-Santal´oinequality for the volumes of polar convex bodies. Two proofs are given; the first one can be adapted to hyperbolic space. MSC 2000: 52A40 (primary); 52A55, 52A22 (secondary) Keywords: spherical convexity, Urysohn inequality, Blaschke- Santal´oinequality, intrinsic volume, quermassintegral, polar convex bodies, two-point symmetrization In the classical geometry of convex bodies in Euclidean space, the intrinsic volumes (or quermassintegrals) play a central role. These functionals have counterparts in spherical and hyperbolic geometry, and it is a challenge for a geometer to find analogues in these spaces for the known results about Euclidean intrinsic volumes. In the present paper, we prove one such result, an inequality of isoperimetric type in spherical (or hyperbolic) space, which can be considered as a counterpart to the Urysohn inequality and is, in the spherical case, also related to the Blaschke-Santal´oinequality. Before stating the result (at the beginning of Section 2), we want to recall and collect the basic facts about intrinsic volumes in Euclidean space, describe their noneuclidean counterparts, and state those open problems about the latter which we consider to be of particular interest. -

Steinitz's Theorem Project Report §1 Introduction §2 Basic Definitions
Steinitz's Theorem Project Report Jon Hillery May 17, 2019 §1 Introduction Looking at the vertices and edges of polyhedra gives a family of graphs that we might expect has nice properties. It turns out that there is actually a very nice characterization of these graphs! We can use this characterization to find useful representations of certain graphs. §2 Basic Definitions We define a space to be convex if the line segment connecting any two points in the space remains entirely inside the space. This works for two-dimensional sets: and three-dimensional sets: Given a polyhedron, we define its 1-skeleton to be the graph formed from the vertices and edges of the polyhedron. For example, the 1-skeleton of a tetrahedron is K4: 1 Jon Hillery (May 17, 2019) Steinitz's Theorem Project Report Here are some further examples of the 1-skeleton of an icosahedron and a dodecahedron: §3 Properties of 1-Skeletons What properties do we know the 1-skeleton of a convex polyhedron must have? First, it must be planar. To see this, imagine moving your eye towards one of the faces until you are close enough that all of the other faces appear \inside" the face you are looking through, as shown here: This is always possible because the polyedron is convex, meaning intuitively it doesn't have any parts that \jut out". The graph formed from viewing in this way will have no intersections because the polyhedron is convex, so the straight-line rays our eyes see are not allowed to leave via an edge on the boundary of the polyhedron and then go back inside. -

17 Measure Concentration for the Sphere
17 Measure Concentration for the Sphere In today’s lecture, we will prove the measure concentration theorem for the sphere. Recall that this was one of the vital steps in the analysis of the Arora-Rao-Vazirani approximation algorithm for sparsest cut. Most of the material in today’s lecture is adapted from Matousek’s book [Mat02, chapter 14] and Keith Ball’s lecture notes on convex geometry [Bal97]. n n−1 Notation: We will use the notation Bn to denote the ball of unit radius in R and S n to denote the sphere of unit radius in R . Let µ denote the normalized measure on the unit sphere (i.e., for any measurable set S ⊆ Sn−1, µ(A) denotes the ratio of the surface area of µ to the entire surface area of the sphere Sn−1). Recall that the n-dimensional volume of a ball n n n of radius r in R is given by the formula Vol(Bn) · r = vn · r where πn/2 vn = n Γ 2 + 1 Z ∞ where Γ(x) = tx−1e−tdt 0 n−1 The surface area of the unit sphere S is nvn. Theorem 17.1 (Measure Concentration for the Sphere Sn−1) Let A ⊆ Sn−1 be a mea- n−1 surable subset of the unit sphere S such that µ(A) = 1/2. Let Aδ denote the δ-neighborhood n−1 n−1 of A in S . i.e., Aδ = {x ∈ S |∃z ∈ A, ||x − z||2 ≤ δ}. Then, −nδ2/2 µ(Aδ) ≥ 1 − 2e . Thus, the above theorem states that if A is any set of measure 0.5, taking a step of even √ O (1/ n) around A covers almost 99% of the entire sphere. -

Self-Dual Configurations and Regular Graphs
SELF-DUAL CONFIGURATIONS AND REGULAR GRAPHS H. S. M. COXETER 1. Introduction. A configuration (mci ni) is a set of m points and n lines in a plane, with d of the points on each line and c of the lines through each point; thus cm = dn. Those permutations which pre serve incidences form a group, "the group of the configuration." If m — n, and consequently c = d, the group may include not only sym metries which permute the points among themselves but also reci procities which interchange points and lines in accordance with the principle of duality. The configuration is then "self-dual," and its symbol («<*, n<j) is conveniently abbreviated to na. We shall use the same symbol for the analogous concept of a configuration in three dimensions, consisting of n points lying by d's in n planes, d through each point. With any configuration we can associate a diagram called the Menger graph [13, p. 28],x in which the points are represented by dots or "nodes," two of which are joined by an arc or "branch" when ever the corresponding two points are on a line of the configuration. Unfortunately, however, it often happens that two different con figurations have the same Menger graph. The present address is concerned with another kind of diagram, which represents the con figuration uniquely. In this Levi graph [32, p. 5], we represent the points and lines (or planes) of the configuration by dots of two colors, say "red nodes" and "blue nodes," with the rule that two nodes differently colored are joined whenever the corresponding elements of the configuration are incident. -

15 BASIC PROPERTIES of CONVEX POLYTOPES Martin Henk, J¨Urgenrichter-Gebert, and G¨Unterm
15 BASIC PROPERTIES OF CONVEX POLYTOPES Martin Henk, J¨urgenRichter-Gebert, and G¨unterM. Ziegler INTRODUCTION Convex polytopes are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their im- portance for many other mathematical subjects, ranging from integration theory, algebraic topology, and algebraic geometry to linear and combinatorial optimiza- tion. In this chapter we try to give a short introduction, provide a sketch of \what polytopes look like" and \how they behave," with many explicit examples, and briefly state some main results (where further details are given in subsequent chap- ters of this Handbook). We concentrate on two main topics: • Combinatorial properties: faces (vertices, edges, . , facets) of polytopes and their relations, with special treatments of the classes of low-dimensional poly- topes and of polytopes \with few vertices;" • Geometric properties: volume and surface area, mixed volumes, and quer- massintegrals, including explicit formulas for the cases of the regular simplices, cubes, and cross-polytopes. We refer to Gr¨unbaum [Gr¨u67]for a comprehensive view of polytope theory, and to Ziegler [Zie95] respectively to Gruber [Gru07] and Schneider [Sch14] for detailed treatments of the combinatorial and of the convex geometric aspects of polytope theory. 15.1 COMBINATORIAL STRUCTURE GLOSSARY d V-polytope: The convex hull of a finite set X = fx1; : : : ; xng of points in R , n n X i X P = conv(X) := λix λ1; : : : ; λn ≥ 0; λi = 1 : i=1 i=1 H-polytope: The solution set of a finite system of linear inequalities, d T P = P (A; b) := x 2 R j ai x ≤ bi for 1 ≤ i ≤ m ; with the extra condition that the set of solutions is bounded, that is, such that m×d there is a constant N such that jjxjj ≤ N holds for all x 2 P . -

Geometry and Arithmetic of Crystallographic Sphere Packings
Geometry and arithmetic of crystallographic sphere packings Alex Kontorovicha,b,1 and Kei Nakamuraa aDepartment of Mathematics, Rutgers University, New Brunswick, NJ 08854; and bSchool of Mathematics, Institute for Advanced Study, Princeton, NJ 08540 Edited by Kenneth A. Ribet, University of California, Berkeley, CA, and approved November 21, 2018 (received for review December 12, 2017) We introduce the notion of a “crystallographic sphere packing,” argument leading to Theorem 3 comes from constructing circle defined to be one whose limit set is that of a geometrically packings “modeled on” combinatorial types of convex polyhedra, finite hyperbolic reflection group in one higher dimension. We as follows. exhibit an infinite family of conformally inequivalent crystallo- graphic packings with all radii being reciprocals of integers. We (~): Polyhedral Packings then prove a result in the opposite direction: the “superintegral” Let Π be the combinatorial type of a convex polyhedron. Equiv- ones exist only in finitely many “commensurability classes,” all in, alently, Π is a 3-connectedz planar graph. A version of the at most, 20 dimensions. Koebe–Andreev–Thurston Theorem§ says that there exists a 3 geometrization of Π (that is, a realization of its vertices in R with sphere packings j crystallographic j arithmetic j polyhedra j straight lines as edges and faces contained in Euclidean planes) Coxeter diagrams having a midsphere (meaning, a sphere tangent to all edges). This midsphere is then also simultaneously a midsphere for the he goal of this program is to understand the basic “nature” of dual polyhedron Πb. Fig. 2A shows the case of a cuboctahedron Tthe classical Apollonian gasket. -

Spherical Cap Packing Asymptotics and Rank-Extreme Detection Kai Zhang
IEEE TRANSACTIONS ON INFORMATION THEORY 1 Spherical Cap Packing Asymptotics and Rank-Extreme Detection Kai Zhang Abstract—We study the spherical cap packing problem with a observations can be written as probabilistic approach. Such probabilistic considerations result Pn ¯ ¯ in an asymptotic sharp universal uniform bound on the maximal i=1(Xi − X)(Yi − Y ) Cb(X; Y ) = q q inner product between any set of unit vectors and a stochastically Pn (X − X¯)2 Pn (Y − Y¯ )2 independent uniformly distributed unit vector. When the set of i=1 i i=1 i unit vectors are themselves independently uniformly distributed, (I.1) we further develop the extreme value distribution limit of where Xi’s and Yi’s are the n independent and identically the maximal inner product, which characterizes its uncertainty distributed (i.i.d.) observations of X and Y respectively, around the bound. and X¯ and Y¯ are the sample means of X and Y As applications of the above asymptotic results, we derive (1) respectively. The sample correlation coefficient possesses an asymptotic sharp universal uniform bound on the maximal spurious correlation, as well as its uniform convergence in important statistical properties and was carefully studied distribution when the explanatory variables are independently in the classical case when the number of variables is Gaussian distributed; and (2) an asymptotic sharp universal small compared to the number of observations. How- bound on the maximum norm of a low-rank elliptically dis- ever, the situation has dramatically changed in the new tributed vector, as well as related limiting distributions. With high-dimensional paradigm [1, 2] as the large number these results, we develop a fast detection method for a low-rank structure in high-dimensional Gaussian data without using the of variables in the data leads to the failure of many spectrum information. -

DIMACS REU 2018 Project: Sphere Packings and Number Theory
DIMACS REU 2018 Project: Sphere Packings and Number Theory Alisa Cui, Devora Chait, Zachary Stier Mentor: Prof. Alex Kontorovich July 13, 2018 Apollonian Circle Packing This is an Apollonian circle packing: I Draw two more circles, each of which is tangent to the original three Apollonian Circle Packing Here's how we construct it: I Start with three mutually tangent circles I Draw two more circles, each of which is tangent to the original three Apollonian Circle Packing Here's how we construct it: I Start with three mutually tangent circles Apollonian Circle Packing Here's how we construct it: I Start with three mutually tangent circles I Draw two more circles, each of which is tangent to the original three Apollonian Circle Packing I Start with three mutually tangent circles I Draw two more circles, each of which is tangent to the original three Apollonian Circle Packing I Start with three mutually tangent circles I Draw two more circles, each of which is tangent to the original three I Continue drawing tangent circles, densely filling space These two images actually represent the same circle packing! We can go from one realization to the other using circle inversions. Apollonian Circle Packing Apollonian Circle Packing These two images actually represent the same circle packing! We can go from one realization to the other using circle inversions. Circle Inversions Circle inversion sends points at a distance of rd from the center of the mirror circle to a distance of r=d from the center of the mirror circle. Circle Inversions Circle inversion sends points at a distance of rd from the center of the mirror circle to a distance of r=d from the center of the mirror circle. -
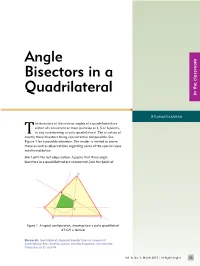
Angle Bisectors in a Quadrilateral Are Concurrent
Angle Bisectors in a Quadrilateral in the classroom A Ramachandran he bisectors of the interior angles of a quadrilateral are either all concurrent or meet pairwise at 4, 5 or 6 points, in any case forming a cyclic quadrilateral. The situation of exactly three bisectors being concurrent is not possible. See Figure 1 for a possible situation. The reader is invited to prove these as well as observations regarding some of the special cases mentioned below. Start with the last observation. Assume that three angle bisectors in a quadrilateral are concurrent. Join the point of T D E H A F G B C Figure 1. A typical configuration, showing how a cyclic quadrilateral is formed Keywords: Quadrilateral, diagonal, angular bisector, tangential quadrilateral, kite, rhombus, square, isosceles trapezium, non-isosceles trapezium, cyclic, incircle 33 At Right Angles | Vol. 4, No. 1, March 2015 Vol. 4, No. 1, March 2015 | At Right Angles 33 D A D A D D E G A A F H G I H F F G E H B C E Figure 3. If is a parallelogram, then is a B C B C rectangle B C Figure 2. A tangential quadrilateral Figure 6. The case when is a non-isosceles trapezium: the result is that is a cyclic Figure 7. The case when has but A D quadrilateral in which : the result is that is an isosceles ∘ trapezium ( and ∠ ) E ∠ ∠ ∠ ∠ concurrence to the fourth vertex. Prove that this line indeed bisects the angle at the fourth vertex. F H Tangential quadrilateral A quadrilateral in which all the four angle bisectors G meet at a pointincircle is a — one which has an circle touching all the four sides. -

Scribability Problems for Polytopes
SCRIBABILITY PROBLEMS FOR POLYTOPES HAO CHEN AND ARNAU PADROL Abstract. In this paper we study various scribability problems for polytopes. We begin with the classical k-scribability problem proposed by Steiner and generalized by Schulte, which asks about the existence of d-polytopes that cannot be realized with all k-faces tangent to a sphere. We answer this problem for stacked and cyclic polytopes for all values of d and k. We then continue with the weak scribability problem proposed by Gr¨unbaum and Shephard, for which we complete the work of Schulte by presenting non weakly circumscribable 3-polytopes. Finally, we propose new (i; j)-scribability problems, in a strong and a weak version, which generalize the classical ones. They ask about the existence of d-polytopes that can not be realized with all their i-faces \avoiding" the sphere and all their j-faces \cutting" the sphere. We provide such examples for all the cases where j − i ≤ d − 3. Contents 1. Introduction 2 1.1. k-scribability 2 1.2. (i; j)-scribability 3 Acknowledgements 4 2. Lorentzian view of polytopes 4 2.1. Convex polyhedral cones in Lorentzian space 4 2.2. Spherical, Euclidean and hyperbolic polytopes 5 3. Definitions and properties 6 3.1. Strong k-scribability 6 3.2. Weak k-scribability 7 3.3. Strong and weak (i; j)-scribability 9 3.4. Properties of (i; j)-scribability 9 4. Weak scribability 10 4.1. Weak k-scribability 10 4.2. Weak (i; j)-scribability 13 5. Stacked polytopes 13 5.1. Circumscribability 14 5.2. -

Unilateral and Equitransitive Tilings by Equilateral Triangles
Discrete Mathematics 340 (2017) 1669–1680 Contents lists available at ScienceDirect Discrete Mathematics journal homepage: www.elsevier.com/locate/disc Unilateral and equitransitive tilings by equilateral trianglesI Rebekah Aduddell a, Morgan Ascanio b, Adam Deaton c, Casey Mann b,* a Texas Lutheran University, United States b University of Washington Bothell, United States c University of Texas, United States article info a b s t r a c t Article history: A tiling of the plane by polygons is unilateral if each edge of the tiling is a side of at most Received 6 July 2016 one polygon of the tiling. A tiling is equitransitive if for any two congruent tiles in the tiling, Received in revised form 18 October 2016 there exists a symmetry of the tiling mapping one to the other. It is known that a unilateral Accepted 31 October 2016 and equitransitive (UE) tiling can be made with any finite number of congruence classes of Available online 16 December 2016 squares. This article addresses the related question, raised in the book Tilings and Patterns by Keywords: Grünbaum and Shephard, of finding all UE tilings by equilateral triangles. In particular, we Tiling show that there are only two classes of UE tilings admitted by a finite number of congruence Triangles classes of equilateral triangles: one with two sizes of triangles and one with three sizes of Unilateral triangles. Equitransitive ' 2016 Published by Elsevier B.V. 1. Introduction A plane tiling T is a countable set of closed topological disks, fT1; T2; T3;:::g, that covers the plane without overlaps (i.e. -

Mathematical Constants and Sequences
Mathematical Constants and Sequences a selection compiled by Stanislav Sýkora, Extra Byte, Castano Primo, Italy. Stan's Library, ISSN 2421-1230, Vol.II. First release March 31, 2008. Permalink via DOI: 10.3247/SL2Math08.001 This page is dedicated to my late math teacher Jaroslav Bayer who, back in 1955-8, kindled my passion for Mathematics. Math BOOKS | SI Units | SI Dimensions PHYSICS Constants (on a separate page) Mathematics LINKS | Stan's Library | Stan's HUB This is a constant-at-a-glance list. You can also download a PDF version for off-line use. But keep coming back, the list is growing! When a value is followed by #t, it should be a proven transcendental number (but I only did my best to find out, which need not suffice). Bold dots after a value are a link to the ••• OEIS ••• database. This website does not use any cookies, nor does it collect any information about its visitors (not even anonymous statistics). However, we decline any legal liability for typos, editing errors, and for the content of linked-to external web pages. Basic math constants Binary sequences Constants of number-theory functions More constants useful in Sciences Derived from the basic ones Combinatorial numbers, including Riemann zeta ζ(s) Planck's radiation law ... from 0 and 1 Binomial coefficients Dirichlet eta η(s) Functions sinc(z) and hsinc(z) ... from i Lah numbers Dedekind eta η(τ) Functions sinc(n,x) ... from 1 and i Stirling numbers Constants related to functions in C Ideal gas statistics ... from π Enumerations on sets Exponential exp Peak functions (spectral) ..