Geomorphic/Geologic Mapping, Localization, and Traverse Planning at the Opportunity Landing Site, Mars
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The IRM the Iron That Binds: the Unexpectedly Strong Magnetism Of
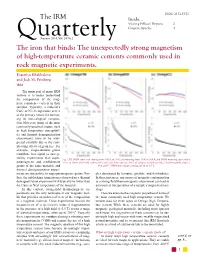
ISSN: 2152-1972 The IRM Inside... Visiting Fellows' Reports 2 Current Articles 4 QuarterlySummer 2014, Vol. 24 No.2 The iron that binds: The unexpectedly strong magnetism of high-temperature ceramic cements commonly used in rock magnetic experiments. Evgeniya Khakhalova and Josh M. Feinberg IRM The main goal of many IRM visitors is to better understand the composition of the mag- netic remanence carriers in their samples. Typically, a material’s Curie or Néel temperature serves as the primary means for estimat- ing its mineralogical composi- tion. However, many of the most commonly used techniques, such as high temperature susceptibil- ity and thermal demagnetization experiments, have to be inter- preted carefully due to the com- plicating effects of grain size. For example, single-domain grains contribute less signal to suscep- tibility experiments than super- Fig 1. RT SIRM curves on cooling from 300 K to 10 K and warming from 10 K to 300 K and SIRM warming curves from paramagnetic and multidomain 10 K to 300 K after field-cooling (FC) and zero-field-cooling (ZFC) of samples (a) Omega700_3, (b) Omega600, and (c) grains of the same material, and OmegaCC. SIRM was imparted using a field of 2.5 T. thermal demagnetization experi- ments are insensitive to superparamagnetic grains. Fur- ples dominated by hematite, goethite, and ferrihydrite). ther, the unblocking temperatures observed in a thermal In these instances, any source of magnetic contamination demagnetization experiment will typically be lower than in a strong-field thermomagnetic experiment can lead to the Curie or Néel temperature of the material. an incorrect interpretation of a sample’s magnetic miner- In this context, strong-field thermomagnetic ex- alogy. -

Geochemistry This
TORONTOTORONTO Vol. 8, No. 4 April 1998 Call for Papers GSA TODAY — page C1 A Publication of the Geological Society of America Electronic Abstracts Submission — page C3 Antarctic Neogene Landscapes—In the 1998 Registration Refrigerator or in the Deep Freeze? Annual Issue Meeting — June GSA Today Introduction The present Molly F. Miller, Department of Geology, Box 117-B, Vanderbilt Antarctic landscape undergoes very University, Nashville, TN 37235, [email protected] slow environmental change because it is almost entirely covered by a thick, slow-moving ice sheet and thus effectively locked in a Mark C. G. Mabin, Department of Tropical Environmental Studies deep freeze. The ice sheet–landscape system is essentially stable, and Geography, James Cook University, Townsville, Queensland 4811, Australia, [email protected] Antarctic—Introduction continued on p. 2 Atmospheric Transport of Diatoms in the Antarctic Sirius Group: Pliocene Deep Freeze Arjen P. Stroeven, Department of Quaternary Research, Stockholm University, S-106 91 Stockholm, Sweden Lloyd H. Burckle, Lamont-Doherty Earth Observatory of Columbia University, Palisades, NY 10964 Johan Kleman, Department of Physical Geography, Stockholm University, S-106, 91 Stockholm, Sweden Michael L. Prentice, Institute for the Study of Earth, Oceans, and Space, University of New Hampshire, Durham, NH 03824 INTRODUCTION How did young diatoms (including some with ranges from the Pliocene to the Pleistocene) get into the Sirius Group on the slopes of the Transantarctic Mountains? Dynamicists argue for emplacement by a wet-based ice sheet that advanced across East Antarctica and the Transantarctic Mountains after flooding of interior basins by relatively warm marine waters [2 to 5 °C according to Webb and Harwood (1991)]. -

Planetary Report Report
The PLANETARYPLANETARY REPORT REPORT Volume XXIX Number 1 January/February 2009 Beyond The Moon From The Editor he Internet has transformed the way science is On the Cover: Tdone—even in the realm of “rocket science”— The United States has the opportunity to unify and inspire the and now anyone can make a real contribution, as world’s spacefaring nations to create a future brightened by long as you have the will to give your best. new goals, such as the human exploration of Mars and near- In this issue, you’ll read about a group of amateurs Earth asteroids. Inset: American astronaut Peggy A. Whitson who are helping professional researchers explore and Russian cosmonaut Yuri I. Malenchenko try out training Mars online, encouraged by Mars Exploration versions of Russian Orlan spacesuits. Background: The High Rovers Project Scientist Steve Squyres and Plane- Resolution Camera on Mars Express took this snapshot of tary Society President Jim Bell (who is also head Candor Chasma, a valley in the northern part of Valles of the rovers’ Pancam team.) Marineris, on July 6, 2006. Images: Gagarin Cosmonaut Training This new Internet-enabled fun is not the first, Center. Background: ESA nor will it be the only, way people can participate in planetary exploration. The Planetary Society has been encouraging our members to contribute Background: their minds and energy to science since 1984, A dust storm blurs the sky above a volcanic caldera in this image when the Pallas Project helped to determine the taken by the Mars Color Imager on Mars Reconnaissance Orbiter shape of a main-belt asteroid. -

Exploration of Victoria Crater by the Mars Rover Opportunity
Exploration of Victoria Crater by the Mars Rover Opportunity The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation Squyres, Steven W., Andrew H. Knoll, Raymond E. Arvidson, James W. Ashley, James F. III Bell, Wendy M. Calvin, Philip R. Christensen, et al. 2009. Exploration of Victoria Crater by the Mars rover Opportunity. Science 324(5930): 1058-1061. Published Version doi:10.1126/science.1170355 Citable link http://nrs.harvard.edu/urn-3:HUL.InstRepos:3934552 Terms of Use This article was downloaded from Harvard University’s DASH repository, and is made available under the terms and conditions applicable to Open Access Policy Articles, as set forth at http:// nrs.harvard.edu/urn-3:HUL.InstRepos:dash.current.terms-of- use#OAP Exploration of Victoria Crater by the Rover Opportunity S.W. Squyres1, A.H. Knoll2, R.E. Arvidson3, J.W. Ashley4, J.F. Bell III1, W.M. Calvin5, P.R. Christensen4, B.C. Clark6, B.A. Cohen7, P.A. de Souza Jr.8, L. Edgar9, W.H. Farrand10, I. Fleischer11, R. Gellert12, M.P. Golombek13, J. Grant14, J. Grotzinger9, A. Hayes9, K.E. Herkenhoff15, J.R. Johnson15, B. Jolliff3, G. Klingelhöfer11, A. Knudson4, R. Li16, T.J. McCoy17, S.M. McLennan18, D.W. Ming19, D.W. Mittlefehldt19, R.V. Morris19, J.W. Rice Jr.4, C. Schröder11, R.J. Sullivan1, A. Yen13, R.A. Yingst20 1 Dept. of Astronomy, Space Sciences Bldg., Cornell University, Ithaca, NY 14853, USA 2 Botanical Museum, Harvard University, Cambridge MA 02138, USA 3 Dept. -

Mars Reconnaissance Orbiter and Opportunity Observations Of
PUBLICATIONS Journal of Geophysical Research: Planets RESEARCH ARTICLE Mars Reconnaissance Orbiter and Opportunity 10.1002/2014JE004686 observations of the Burns formation: Crater Key Point: hopping at Meridiani Planum • Hydrated Mg and Ca sulfate Burns formation minerals mapped with MRO R. E. Arvidson1, J. F. Bell III2, J. G. Catalano1, B. C. Clark3, V. K. Fox1, R. Gellert4, J. P. Grotzinger5, and MER data E. A. Guinness1, K. E. Herkenhoff6, A. H. Knoll7, M. G. A. Lapotre5, S. M. McLennan8, D. W. Ming9, R. V. Morris9, S. L. Murchie10, K. E. Powell1, M. D. Smith11, S. W. Squyres12, M. J. Wolff3, and J. J. Wray13 1 2 Correspondence to: Department of Earth and Planetary Sciences, Washington University in Saint Louis, Missouri, USA, School of Earth and Space R. E. Arvidson, Exploration, Arizona State University, Tempe, Arizona, USA, 3Space Science Institute, Boulder, Colorado, USA, 4Department of [email protected] Physics, University of Guelph, Guelph, Ontario, Canada, 5Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena, California, USA, 6U.S. Geological Survey, Astrogeology Science Center, Flagstaff, Arizona, USA, 7 8 Citation: Department of Organismic and Evolutionary Biology, Harvard University, Cambridge, Massachusetts, USA, Department Arvidson, R. E., et al. (2015), Mars of Geosciences, Stony Brook University, Stony Brook, New York, USA, 9NASA Johnson Space Center, Houston, Texas, USA, Reconnaissance Orbiter and Opportunity 10Applied Physics Laboratory, Johns Hopkins University, Laurel, Maryland, USA, 11NASA Goddard Space Flight Center, observations of the Burns formation: Greenbelt, Maryland, USA, 12Department of Astronomy, Cornell University, Ithaca, New York, USA, 13School of Earth and Crater hopping at Meridiani Planum, J. -

Operation and Performance of the Mars Exploration Rover Imaging System on the Martian Surface
Operation and Performance of the Mars Exploration Rover Imaging System on the Martian Surface Justin N. Maki Jet Propulsion Laboratory California Institute of Technology Pasadena, CA USA [email protected] Todd Litwin, Mark Schwochert Jet Propulsion Laboratory California Institute of Technology Pasadena, CA USA Ken Herkenhoff United States Geological Survey Flagstaff, AZ USA Abstract - The Imaging System on the Mars Exploration Rovers has successfully operated on the surface of Mars for over one Earth year. The acquisition of hundreds of panoramas and tens of thousands of stereo pairs has enabled the rovers to explore Mars at a level of detail unprecedented in the history of space exploration. In addition to providing scientific value, the images also play a key role in the daily tactical operation of the rovers. The mobile nature of the MER surface mission requires extensive use of the imaging system for traverse planning, rover localization, remote sensing instrument targeting, and robotic arm placement. Each of these activity types requires a different set of data compression rates, surface Figure 1. The Mars Exploration Spirit Rover, as viewed by coverage, and image acquisition strategies. An overview the Navcam shortly after lander egress early in the mission. of the surface imaging activities is provided, along with a presents an overview of the operation and performance of summary of the image data acquired to date. the MER Imaging System. Keywords: Imaging system, cameras, rovers, Mars, 1.2 Imaging System Design operations. The MER cameras are classified into five types: Descent cameras, Navigation cameras (Navcam), Hazard Avoidance 1 Introduction cameras (Hazcam), Panoramic cameras (Pancam), and Microscopic Imager (MI) cameras. -

A Retrospective Snapshot of the Planning Processes in MER Operations After 5 Years
A Retrospective Snapshot of the Planning Processes in MER Operations After 5 Years Anthony Barrett, Deborah Bass, Sharon Laubach, and Andrew Mishkin Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive M/S 301-260 {firstname.lastname}@jpl.nasa.gov Abstract Over the past five years on Mars, the Mars Exploration Rovers have traveled over 20 kilometers to climb tall hills and descend into craters. Over that period the operations process has continued to evolve as deep introspection by the MER uplink team suggests streamlining improvements and lessons learned adds complexity to handle new problems. As such, the operations process and its supporting tools automate enough of the drudgery to circumvent staff burnout issues while being nimble and safe enough to let an operations staff respond to the problems that Mars throws up on a daily basis. This paper describes the currently used integrated set of planning processes that support rover operations on a daily basis after five years of evolution. Figure 1. Mars Exploration Rover For communications, each rover has a high gain antenna Introduction for receiving instructions from Earth, and a low gain On January 3 & 24, 2004 Spirit and Opportunity, the twin antenna for transmitting data to the Odyssey or Mars Mars Exploration Rovers (MER), landed on opposite sides Reconnaissance orbiters with subsequent relay to Earth. of Mars at Gusev Crater and Meridiani Planum Given that it takes between 6 and 44 minutes for a signal to respectively. Each rover was originally expected to last 90 travel to and from the rovers, simple joystick operations Sols (Martian days) due to dust accumulation on the solar are not feasible. -

"Nkw^ORKI
j 18 -f THE NEWr YORK HERALD, WEIDNESDAY, DECEMBER 28, 1921. SHIP PI NG NEWS FR<OM AL L PARIrs of The1fl ORLD f \ William A McKenney lat 38 43. Ion 74 42 Str City of St I.ouls, Johnson, Savannah nopn, 30.16 Inrhea; wind, W, light breeze; tall shaft, hut which Is now being towed tg CLOSING OF MAILS -7th. (, general).Ocean Steamship Co. weatlier, dull; temperature, 23 deg Fahr. port by str Balsam. Notice to Owners, Agents and William H t'oheny 434 E Tatnplco 27th. Str city of Savannah, Borum, Savannah The postponed auction sale of bargee STRONG MAN LIKELY Foreign mails will close promptly as ind icated below at the General Post Office and general).Ocean Steamship Co. hiictu and Congressman Scully took placeTim1at City Hall Station. Ordinary prints, samples, parcel pout packages and registered articles Ship Masters. Sir Arapahoe, Devereaux, Charleston and ICast Doeton Saturday by Deputy U S Ma^ close iwo hours earlier, except that registered articles have to be mailed between the hours PASSED CITY ISLAND. J acksonvtll" (general).Clyde Steamship Co. MARITIME MISCELLANY. rltal; they were purchased by R Savldge of of M AM and I'd I'M. At the Foreign Station (corner of Morton and West streets) foreign Str Hamilton. Nelson, Norfolk (general). 8tr Norfolk, Portland for Norfolk, put In Brooklyn for $10,100 each. mall closes half an hour later than at the Geie rul Post Office and Hall Station, The Herald publishes Id Dominion Transportation Co. here wit)i main steam pipe broken; veeeel ALIEN City daily Boston HAVANA, Doc 27.Freight is beginning to TO BEND closes at Str Osborn, BARS mall the double Bound South. -
2020 Crew Health & Performance EVA Roadmap
NASA/TP-20205007604 Crew Health and Performance Extravehicular Activity Roadmap: 2020 Andrew F. J. Abercromby1 Omar Bekdash4 J. Scott Cupples1 Jocelyn T. Dunn4 E. Lichar Dillon2 Alejandro Garbino3 Yaritza Hernandez4 Alexandros D. Kanelakos1 Christine Kovich5 Emily Matula6 Matthew J. Miller7 James Montalvo6 Jason Norcross4 Cameron W. Pittman7 Sudhakar Rajulu1 Richard A. Rhodes1 Linh Vu8 1NASA Johnson Space Center, Houston, Texas 2University of Texas Medical Branch, Galveston, Texas 3GeoControl Systems Inc., Houston, Texas 4KBR, Houston, Texas 5The Aerospace Corporation, Houston, Texas 6Stinger Ghaffarian Technologies (SGT) Inc., Houston, Texas 7Jacobs Technology, Inc., Houston, Texas 8MEI Technologies, Inc., Houston, Texas National Aeronautics and Space Administration Johnson Space Center Houston, Texas 77058 October 2020 The NASA STI Program Office ... in Profile Since its founding, NASA has been dedicated to the • CONFERENCE PUBLICATION. advancement of aeronautics and space science. The Collected papers from scientific and NASA scientific and technical information (STI) technical conferences, symposia, seminars, program plays a key part in helping NASA or other meetings sponsored or maintain this important role. co-sponsored by NASA. The NASA STI program operates under the • SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information Officer. technical, or historical information from It collects, organizes, provides for archiving, and NASA programs, projects, and missions, disseminates NASA’s STI. The NASA STI often concerned with subjects having program provides access to the NTRS Registered substantial public interest. and its public interface, the NASA Technical Report Server, thus providing one of the largest • TECHNICAL TRANSLATION. collections of aeronautical and space science STI in English-language translations of foreign the world. Results are published in both non-NASA scientific and technical material pertinent to channels and by NASA in the NASA STI Report NASA’s mission. -

A MTAK Kiadványai 47. Budapest, 1966
A MAGYAR TUDOMÁNYOS AKADÉMIA KÖNYVTARÁNAK KÖZLEMÉNYEI PUBLICATIONES BIBLIOTHECAE ACADEMIAE SCIENTIARUM HUNGARICAE 47. INDEX ÀCRONYMORUM SELECTORUM Institute* communicationis BUDAPEST, 1966 VOCABULARIUM ABBREVIATURARUM BIBLIOTHECARII III Index acronymorum selectorum 7. Instituta communicationis A MAGYAR TUDOMÁNYOS AKADÉMIA KÖNYVTARÁNAK KÖZLEMÉNYEI PUBLICATIONES BIBLIOTHECAE ACADEMIAE SCIENTIARUM HUNGARICAE 47. VOCABULARIUM ABBREVIATURARUM BIBLIOTHECARII Index acronymorum selectorum 7. Instituta communicationis BUDAPEST, 196 6 A MAGYAR TUDOMÁNYOS AKADÉMIA KÖNYVTARÁNAK KÖZLEMÉNYEI PUBLICATIONES BIBLIOTHECAE ACADEMIAE SCIENTIARUM HUNGARICAE 47. INDEX ACRONYMORUM SELECTORUM 7 Instituta communications. BUDAPEST, 1966 INDEX ACRONYMORUM SELECTORUM Pars. 7. Instituta communicationis. Adiuvantibus EDIT BODNÁ R-BERN ÁT H et MAGDA TULOK collegit et edidit dr. phil. ENDRE MORAVEK Lectores: Gyula Tárkányi Sámuel Papp © 1966 MTA Köynvtára F. к.: Rózsa György — Kiadja a MTA Könyvtára — Példányszám: 750 Alak A/4. - Terjedelem 47'/* A/5 ív 65395 - M.T.A. KESz sokszorosító v ELŐSZÓ "Vocabularium abbreviaturarum bibliothecarii" cimü munkánk ez ujabb füzete az "Index acronymorum selectorum" kötet részeként, a köz- lekedési és hírközlési intézmények /ilyen jellegű állami szervek, vasu- tak, légiközlekedési vállalatok, távirati irodák, sajtóügynökségek stb/ névröviditéseit tartalmazza. Az idevágó felsőbb fokú állami intézmények /pl. minisztériumok stb./ nevének acronymáit, amelyeket az "Instituta rerum publicarum" c. kötetben közöltünk, technikai okokból nem -

Of Curiosity in Gale Crater, and Other Landed Mars Missions
44th Lunar and Planetary Science Conference (2013) 2534.pdf LOCALIZATION AND ‘CONTEXTUALIZATION’ OF CURIOSITY IN GALE CRATER, AND OTHER LANDED MARS MISSIONS. T. J. Parker1, M. C. Malin2, F. J. Calef1, R. G. Deen1, H. E. Gengl1, M. P. Golombek1, J. R. Hall1, O. Pariser1, M. Powell1, R. S. Sletten3, and the MSL Science Team. 1Jet Propulsion Labora- tory, California Inst of Technology ([email protected]), 2Malin Space Science Systems, San Diego, CA ([email protected] ), 3University of Washington, Seattle. Introduction: Localization is a process by which tactical updates are made to a mobile lander’s position on a planetary surface, and is used to aid in traverse and science investigation planning and very high- resolution map compilation. “Contextualization” is hereby defined as placement of localization infor- mation into a local, regional, and global context, by accurately localizing a landed vehicle, then placing the data acquired by that lander into context with orbiter data so that its geologic context can be better charac- terized and understood. Curiosity Landing Site Localization: The Curi- osity landing was the first Mars mission to benefit from the selection of a science-driven descent camera (both MER rovers employed engineering descent im- agers). Initial data downlinked after the landing fo- Fig 1: Portion of mosaic of MARDI EDL images. cused on rover health and Entry-Descent-Landing MARDI imaged the landing site and science target (EDL) performance. Front and rear Hazcam images regions in color. were also downloaded, along with a number of When is localization done? MARDI thumbnail images. The Hazcam images were After each drive for which Navcam stereo da- used primarily to determine the rover’s orientation by ta has been acquired post-drive and terrain meshes triangulation to the horizon. -

Pre-Mission Insights on the Interior of Mars Suzanne E
Pre-mission InSights on the Interior of Mars Suzanne E. Smrekar, Philippe Lognonné, Tilman Spohn, W. Bruce Banerdt, Doris Breuer, Ulrich Christensen, Véronique Dehant, Mélanie Drilleau, William Folkner, Nobuaki Fuji, et al. To cite this version: Suzanne E. Smrekar, Philippe Lognonné, Tilman Spohn, W. Bruce Banerdt, Doris Breuer, et al.. Pre-mission InSights on the Interior of Mars. Space Science Reviews, Springer Verlag, 2019, 215 (1), pp.1-72. 10.1007/s11214-018-0563-9. hal-01990798 HAL Id: hal-01990798 https://hal.archives-ouvertes.fr/hal-01990798 Submitted on 23 Jan 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Open Archive Toulouse Archive Ouverte (OATAO ) OATAO is an open access repository that collects the wor of some Toulouse researchers and ma es it freely available over the web where possible. This is an author's version published in: https://oatao.univ-toulouse.fr/21690 Official URL : https://doi.org/10.1007/s11214-018-0563-9 To cite this version : Smrekar, Suzanne E. and Lognonné, Philippe and Spohn, Tilman ,... [et al.]. Pre-mission InSights on the Interior of Mars. (2019) Space Science Reviews, 215 (1).