SATA and PATA Final
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RS-485: Still the Most Robust Communication Table of Contents
TUTORIAL RS-485: Still the Most Robust Communication Table of Contents Abstract...........................................................................................................................1 RS-485 vs. RS-422..............................................................................................................................2 An In-Depth Look at RS-485...........................................................................................................3 Challenges of the Industrial Environment.....................................................................................5 Protecting Systems from Harsh Environments.........................................................................5 Conclusion......................................................................................................................10 References......................................................................................................................10 Abstract Despite the rise in popularity of wireless networks, wired serial networks continue to provide the most robust, reliable communication, especially in harsh environments. These well-engineered networks provide effective communication in industrial and building automation applications, which require immunity from noise, electrostatic discharge and voltage faults, all resulting in increased uptime. This tutorial reviews the RS-485 protocol and discusses why it is widely used in industrial applications and the common problems it solves. www.maximintegrated.com -
HD3SS214 8.1Gbps Displayport 1.4 2:1/1:2
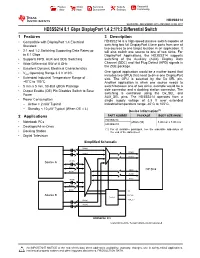
Product Order Technical Tools & Support & Folder Now Documents Software Community HD3SS214 SLAS907B –DECEMBER 2015–REVISED JUNE 2017 HD3SS214 8.1 Gbps DisplayPort 1.4 2:1/1:2 Differential Switch 1 Features 3 Description HD3SS214 is a high-speed passive switch capable of 1• Compatible with DisplayPort 1.4 Electrical Standard switching two full DisplayPort 4 lane ports from one of two sources to one target location in an application. It • 2:1 and 1:2 Switching Supporting Data Rates up will also switch one source to one of two sinks. For to 8.1 Gbps DisplayPort Applications, the HD3SS214 supports • Supports HPD, AUX and DDC Switching switching of the Auxiliary (AUX), Display Data • Wide Differential BW of 8 GHz Channel (DDC) and Hot Plug Detect (HPD) signals in the ZQE package. • Excellent Dynamic Electrical Characteristics • V Operating Range 3.3 V ±10% One typical application would be a mother board that DD includes two GPUs that need to drive one DisplayPort • Extended Industrial Temperature Range of sink. The GPU is selected by the Dx_SEL pin. -40°C to 105°C Another application is when one source needs to • 5 mm x 5 mm, 50-Ball ųBGA Package switch between one of two sinks, example would be a • Output Enable (OE) Pin Disables Switch to Save side connector and a docking station connector. The Power switching is controlled using the Dx_SEL and AUX_SEL pins. The HD3SS214 operates from a • Power Consumption single supply voltage of 3.3 V over extended – Active < 2 mW Typical industrial temperature range -40°C to 105°C. -

Displayport to TMDS Level Shifting Re-Driver Check for Samples: SN75DP139
SN75DP139 www.ti.com SLLS977D –APRIL 2009–REVISED JULY 2013 DisplayPort to TMDS Level Shifting Re-driver Check for Samples: SN75DP139 1FEATURES • DisplayPort Physical Layer Input Port to TMDS • Enhanced ESD: 10kV on All Pins Physical Layer Output Port • Enhanced Commercial Temperature Range: • Integrated TMDS Level Shifting Re-driver With 0°C to 85°C Receiver Equalization • 48 Pin 7 × 7 QFN (RGZ) Package • Supports Data Rates up to 3.4Gbps • 40 Pin 5 x 5 QFN (RSB) Package • Achieves HDMI 1.4b Compliance • 3D HDMI Support With TMDS Clock Rates up APPLICATIONS to 340MHz • Personal Computer Market • 4k x 2k Operation (30Hz, 24bpp) – DP/TMDS Dongle • Deep Color Supporting 36bpp – Desktop PC • Integrated I2C Logic Block for DVI/HDMI – Notebook PC Connector Recognition – Docking Station 2 • Integrated Active I C Buffer – Standalone Video Card DESCRIPTION The SN75DP139 is a Dual-Mode DisplayPort input to Transition-Minimized Differential Signaling (TMDS) output. The TMDS output has a built in level shifting re-driver supporting Digital Video Interface (DVI) 1.0 and High Definition Multimedia Interface (HDMI) 1.4b standards. The SN75DP139 is specified up to a maximum data rate of 3.4Gbps, supporting resolutions greater then 1920x1200 or HDTV 12 bit color depth at 1080p (progressive scan). SN75DP139 is compliant with the HDMI 1.4b specifications and supports optional protocol enhancements such as 3D graphics at resolutions demanding a pixel rate up to 340MHz. An integrated Active I2C buffer isolates the capacitive loading of the source system from that of the sink and interconnecting cable. This isolation improves overall signal integrity of the system and allows for considerable design margin within the source system for DVI / HDMI compliance testing. -
LVDS Application and Data Handbook
LVDS Application and Data Handbook High-Performance Linear Products Technical Staff Literature Number: SLLD009 November 2002 Printed on Recycled Paper IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily performed. TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and applications using TI components. To minimize the risks associated with customer products and applications, customers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information published by TI regarding third–party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement thereof. -
Serial ATA the New Drive Interface Standard for the Desktop and Mobile PC
Boston Tec 14/8/03 7:45 PM Page 1 Technology Paper Serial ATA The new drive interface standard for the desktop and mobile PC Table of Contents Background 2 Comparative Performance 3 The Parallel ATA Interface 4 The Serial ATA Interface 4 Features of Serial ATA 5 Implementing Serial ATA 6 Where does Serial ATA fit in the market place? 8 What is iSCSI and why is Serial ATA so well suited? 8 Boston Ltd Unit 5 Curo Park, Frogmore, St. Albans AL2 2DD Tel: +44 (0) 8707 51 59 50 Fax: +44 (0) 8707 51 59 51 e: [email protected] w: www.boston.co.uk Boston Tec 14/8/03 7:46 PM Page 2 Background The parallel ATA (AT Attachment) specification has defined the common standard storage interface for PCs since the protocol was introduced back in the 1980’s. Parallel ATA has maintained its success for many years for three primary reasons: 1) Low Cost, 2) virtually universal operating system support, and 3) the ability to evolve to higher speeds and performance whilst maintaining backwards compatibility with older parallel ATA devices. From its original interface speed of just 3MB/s, parallel ATA has moved up to burst transfer rates of 66MB/s and 100MB/s and beyond. The latest generation of the parallel ATA interface, Ultra ATA-133, goes even further with a burst transfer rate of up to 133MB/s. While parallel ATA has enjoyed an illustrious track record, the specification is now showing its age. Parallel ATA imposes some serious design issues on today’s developers, including a 5 volt signaling requirement, high pin count, major cabling headaches and, perhaps most significantly, limited performance headroom. -
Serial Attached SCSI (SAS) Interface Manual
Users Guide Serial Attached SCSI (SAS) Interface Manual Users Guide Serial Attached SCSI (SAS) Interface Manual ©2003, 2004, 2005, 2006 Seagate Technology LLC All rights reserved Publication number: 100293071, Rev. B May 2006 Seagate, Seagate Technology, and the Seagate logo are registered trademarks of Seagate Technology LLC. SeaTools, SeaFAX, SeaFONE, SeaBOARD, and SeaTDD are either registered trademarks or trade- marks of Seagate Technology LLC. Other product names are registered trademarks or trademarks of their owners. Seagate reserves the right to change, without notice, product offerings or specifications. No part of this publication may be reproduced in any form without written permission of Seagate Technology LLC. Revision status summary sheet Revision Date Writers/Engineers Notes Rev. A 11/11/04 J. Coomes Initial release. Rev. B 05/07/06 C. Chalupa, J. Coomes, G. Houlder All. Contents 1.0 Interface requirements. 1 1.1 Acknowledgements . 1 1.2 How to use this interface manual . 1 1.2.1 Scope . 2 1.2.2 Applicable specifications . 2 1.2.3 Other references . 3 1.3 General interface description. 3 1.3.1 Introduction to Serial Attached SCSI Interface (SAS) . 3 1.3.2 The SAS interface . 3 1.3.3 Glossary . 5 1.3.4 Keywords . 16 1.4 Physical interface characteristics. 17 1.5 Bit and byte ordering . 17 2.0 General . 19 2.1 Architecture . 19 2.1.1 Architecture overview . 19 2.1.2 Physical links and phys . 19 2.1.3 Ports (narrow ports and wide ports) . 20 2.1.4 SAS devices . 21 2.1.5 Expander devices (edge expander devices and fanout expander devices) . -

Computer Service Technician- CST Competency Requirements
Computer Service Technician- CST Competency Requirements This Competency listing serves to identify the major knowledge, skills, and training areas which the Computer Service Technician needs in order to perform the job of servicing the hardware and the systems software for personal computers (PCs). The present CST COMPETENCIES only address operating systems for Windows current version, plus three older. Included also are general common Linux and Apple competency information, as proprietary service contracts still keep most details specific to in-house service. The Competency is written so that it can be used as a course syllabus, or the study directed towards the education of individuals, who are expected to have basic computer hardware electronics knowledge and skills. Computer Service Technicians must be knowledgeable in the following technical areas: 1.0 SAFETY PROCEDURES / HANDLING / ENVIRONMENTAL AWARENESS 1.1 Explain the need for physical safety: 1.1.1 Lifting hardware 1.1.2 Electrical shock hazard 1.1.3 Fire hazard 1.1.4 Chemical hazard 1.2 Explain the purpose for Material Safety Data Sheets (MSDS) 1.3 Summarize work area safety and efficiency 1.4 Define first aid procedures 1.5 Describe potential hazards in both in-shop and in-home environments 1.6 Describe proper recycling and disposal procedures 2.0 COMPUTER ASSEMBLY AND DISASSEMBLY 2.1 List the tools required for removal and installation of all computer system components 2.2 Describe the proper removal and installation of a CPU 2.2.1 Describe proper use of Electrostatic Discharge -

Serial ATA Interface
Serial ATA Interface Frank R. Chu Senior Engineer Hitachi Global Storage Technologies June 2003 Why do we need a new interface? Limitations of parallel ATA Serial ATA was designed to overcome a number of limitations of parallel ATA. The most significant limitation of parallel ATA is the difficulty in increasing the data rate beyond 100MB/s. Parallel ATA uses a single-ended signaling system that is prone to induced noise. Increasing the parallel data rate beyond 100 MB/s would require a new signaling system that would not be backward compatible with existing systems. Desktop HDDs can be expected to outrun the 100 Mbytes/sec data rate in the next few years so a new system is needed. An additional limitation is that parallel ATA uses 5V signaling levels and upcoming silicon microelectronic processes are not compatible with 5V signaling. Serial ATA overcomes these issues by moving to 250mV differential signaling method. Differential signaling rejects induced noise. The 250mV differential signal level is compatible with future microelectronic fabrication processes. Parallel ATA Topology Serial ATA Topology Parallel ATA Topology Serial ATA Topology Operating system Operating System Serial ATA ATA Application 1 Application 1 Standard Adapter adapter Disk Driver Application 2 Driver Application 2 Drive Disk Application 3 Disk Disk Application 3 Drive drive drive Forecasts Indicate ATA Dominance ATA is the dominant HDD interface in the industry. The ATA interface market is expected to be approximately 190 million units in 2003, accounting for about 90% of all HDDs shipped, according to International Data Corporations (IDC) 2002/03 forecasts. By 2006, IDC projects ATA unit shipments will increase to beyond 310 million and continue to account for 90% of all HDDs shipments. -
Comparing Fibre Channel, Serial Attached SCSI (SAS) and Serial ATA (SATA)
Comparing Fibre Channel, Serial Attached SCSI (SAS) and Serial ATA (SATA) by Allen Hin Wing Lam Bachelor ofElectrical Engineering Carleton University 1996 PROJECT SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ENGINEERING In the School ofEngineering Science © Allen Hin Wing Lam 2009 SIMON FRASER UNIVERSITY Fall 2009 All rights reserved. However, in accordance with the Copyright Act ofCanada, this work may be reproduced, without authorization, under the conditions for Fair Dealing. Therefore, limited reproduction ofthis work for the purposes ofprivate study, research, criticism, review and news reporting is likely to be in accordance with the law, particularly ifcited appropriately. Approval Name: Allen Hin Wing Lam Degree: Master ofEngineering Title ofProject: Comparing Fibre Channel, Serial Attached SCSI (SAS) and Serial ATA (SATA) Examining Committee: Chair: Dr. Daniel Lee Chair ofCommittee Associate Professor, School ofEngineering Science Simon Fraser University Dr. Stephen Hardy Senior Supervisor Professor, School ofEngineering Science Simon Fraser University Jim Younger Manager, Product Engineering PMC- Sierra, Inc. Date ofDefence/Approval r 11 SIMON FRASER UNIVERSITY LIBRARY Declaration of Partial Copyright Licence The author, whose copyright is declared on the title page of this work, has granted to Simon Fraser University the right to lend this thesis, project or extended essay to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response -

Memory Technology and Trends for High Performance Computing Contract #: MDA904-02-C-0441
Memory Technology and Trends for High Performance Computing Contract #: MDA904-02-C-0441 Contract Institution: Georgia Institute of Technology Project Director: D. Scott Wills Project Report 12 September 2002 — 11 September 2004 This project explored the impact of developing memory technologies on future supercomputers. This activity included both a literature study (see attached whitepaper), plus a more practical exploration of potential memory interfacing techniques using the sponsor recommended HyperTransport interface. The report indicates trends that will affect interconnection network design in future supercomputers. Related publications during the contract period include: 1. P. G. Sassone and D. S. Wills, On the Scaling of the Atlas Chip-Scale Multiprocessor, to appear in IEEE Transaction on Computers. 2. P. G. Sassone and D. S. Wills, Dynamic Strands: Collapsing Speculative Dependence Chains for Reducing Pipeline Communication, to appear in IEEE/ACM International Symposium on Microarchitecture, Portland, OR, December 2004. 3. B. A. Small, A. Shacham, K. Bergman, K. Athikulwongse, C. Hawkins, and D. S. Wills, Emulation of Realistic Network Traffic Patterns on an Eight-Node Data Vortex Interconnection Network Subsystem, to appear in OSA Journal of Optical Networking. 4. P. G. Sassone and D. S. Wills, On the Extraction and Analysis of Prevalent Dataflow Patterns, to appear in The IEEE 7th Annual Workshop on Workload Characterization (WWC-7), 8 pages, Austin, TX, October 2004. 5. H. Kim, D. S. Wills, and L. M. Wills, Empirical Analysis of Operand Usage and Transport in Multimedia Applications, in Proceedings of the 4th IEEE International Workshop on System-on-Chip for Real-Time Applications(IWSOC'04), pages 168-171, Banff, Alberta, Canada, July 2004. -

2 Port PCI Express Internal SATA II Controller Card Startech ID: PEXSATA22I
2 Port PCI Express Internal SATA II Controller Card StarTech ID: PEXSATA22I This 2 Port PCI Express Internal Serial ATA Controller Card adds two internal SATA II (SATA /300) ports to a computer through simple installation into an available 1x PCI Express slot. Supporting data transfer speeds of up to 3.0 Gbps, the SATA controller card features Port Multiplier support with command- based switching as well as Native Command Queuing to ensure optimum performance. Using a native PCI Express single chipset, the internal SATA controller card provides enhanced compatibility, reliability and performance for your external storage needs. The controller card also features Port Multiplier support with command based switching for connecting multiple external hard drives to a host computer through one eSATA connection. The controller card includes both standard form factor and low profile brackets, allowing you to add SATA capability to virtually any PCI Express enabled computer, regardless of the case form factor Applications and Solutions • Ideal for individuals and institutions replacing Parallel ATA with Serial ATA hard drives Features • Boot ROM Function • Compliant with Serial ATA 1.0 specifications • Standard and low profile brackets included • Supports Native Command Queuing (NCQ) with Port Multiplier support • Supports SATA II transfer rates of up to 3.0 Gbps • Uses a native PCI Express single chipset,providing enhanced compatibility, reliability and performance for your external storage needs Technical Specifications • Warranty: Lifetime warranty -

External Serial ATA
External Serial ATA WHITE PAPER September 2004 CONTENTS Introduction ........................................................................................................... 3 External Storage Solutions Today......................................................................... 3 Why Serial ATA?................................................................................................... 4 Serial ATA Performance is Limited by USB or 1394 Connections ........................ 4 Serial ATA Transition ............................................................................................ 6 The Need for New Connectors and Cables........................................................... 7 Easy External Serial ATA Offerings ...................................................................... 9 Electrical Signaling Requirements......................................................................... 9 Serial ATA Host Connections.............................................................................. 10 Digital Video Recorders: An Emerging Application for External Storage............ 14 Home Networks: Another Emerging Application ................................................ 15 Conclusion .......................................................................................................... 16 2 WHITE PAPER INTRODUCTION Digital content is pervasive in today’s society, from digital music files and photographs to home movies, not to mention the multitude of financial, e-mail and household or business records a typical