Handclap for Acoustic Measurements: Optimal Application and Limitations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Industrial Noise Control and Acoustics
Industrial Noise Control and Acoustics Randall F. Barron Louisiana Tech University Ruston, Louisiana, U.S.A. Marcel Dekker, Inc. New York • Basel Copyright © 2001 by Marcel Dekker, Inc. All Rights Reserved. Copyright © 2003 Marcel Dekker, Inc. LibraryofCongressCataloging-in-PublicationData AcatalogrecordforthisbookisavailablefromtheLibraryofCongress. ISBN:0-8247-0701-X Thisbookisprintedonacid-freepaper. Headquarters MarcelDekker,Inc. 270MadisonAvenue,NewYork,NY10016 tel:212-696-9000;fax:212-685-4540 EasternHemisphereDistribution MarcelDekkerAG Hutgasse4,Postfach812,CH-4001Basel,Switzerland tel:41-61-260-6300;fax:41-61-260-6333 WorldWideWeb http://www.dekker.com The publisher offers discounts on this book when ordered in bulk quantities, For more information, write to Special Sales/Professional Marketing at the headquarters address above. Copyright # 2003 by Marcel Dekker, Inc. All Rights Reserved. Neither this book nor any part may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying, microfilming, and recording, or by any information storage retrieval system, without permission in writing from the publisher. Current printing (last digit): 10987654321 PRINTED IN THE UNITED STATES OF AMERICA Copyright © 2003 Marcel Dekker, Inc. Preface Since the Walsh-Healy Act of 1969 was amended to include restrictions on the noise exposure of workers, there has been much interest and motivation in industry to reduce noise emitted by machinery. In addition to concerns about air and water pollution by contaminants, efforts have also been direc- ted toward control of environmental noise pollution. In response to these stimuli, faculty at many engineering schools have developed and introduced courses in noise control, usually at the senior design level. It is generally much more effective to design ‘‘quietness’’ into a product than to try to ‘‘fix’’ the noise problem in the field after the product has been put on the market. -

Definition and Measurement of Sound Energy Level of a Transient Sound Source
J. Acoust. Soc. Jpn. (E) 8, 6 (1987) Definition and measurement of sound energy level of a transient sound source Hideki Tachibana,* Hiroo Yano,* and Koichi Yoshihisa** *Institute of Industrial Science , University of Tokyo, 7-22-1, Roppongi, Minato-ku, Tokyo, 106 Japan **Faculty of Science and Technology, Meijo University, 1-501, Shiogamaguti, Tenpaku-ku, Nagoya, 468 Japan (Received 1 May 1987) Concerning stationary sound sources, sound power level which describes the sound power radiated by a sound source is clearly defined. For its measuring methods, the sound pressure methods using free field, hemi-free field and diffuse field have been established, and they have been standardized in the international and national stan- dards. Further, the method of sound power measurement using the sound intensity technique has become popular. On the other hand, concerning transient sound sources such as impulsive and intermittent sound sources, the way of describing and measuring their acoustic outputs has not been established. In this paper, therefore, "sound energy level" which represents the total sound energy radiated by a single event of a transient sound source is first defined as contrasted with the sound power level. Subsequently, its measuring methods by two kinds of sound pressure method and sound intensity method are investigated theoretically and experimentally on referring to the methods of sound power level measurement. PACS number : 43. 50. Cb, 43. 50. Pn, 43. 50. Yw sources, the way of describing and measuring their 1. INTRODUCTION acoustic outputs has not been established. In noise control problems, it is essential to obtain In this paper, "sound energy level" which repre- the information regarding the noise sources. -

Derivation of the Sabine Equation: Conservation of Energy
UIUC Physics 406 Acoustical Physics of Music Derivation of the Sabine Equation: Conservation of Energy Consider a large room of volume V = HWL (m3) with perfectly reflecting walls, filled with a uniform, steady-state (i.e. equilibrium) acoustic energy density wrtfa ,, at given frequency f (Hz) within the volume V of the room. Uniform energy density means that a given time t: 3 waa r,, t f w t , f constant (SI units: Joules/m ). The large room also has a small opening of area A (m2) in it, as shown in the figure below: H V A I rt,, f ac nAˆˆ, An W L In the steady-state, the rate of acoustical energy Wa input e.g. by a point sound source within the large room equals the rate at which acoustical energy is “leaking” out of the room through the hole of area A, i.e. the acoustical power input by the sound source in the room into the room = the acoustical power leaving the room through the hole of area A. In this idealized model of a room with perfectly reflecting walls, the hole of area A thus represents absorption of sound in a real room with finite reflectivity walls, i.e. walls that have some absorption associated with them. Suppose at time t = 0 the sound source in the room {located far from the hole} is turned off. Since the sound energy density is uniform in the room, the sound energy contained in the room Wtf,,,, wrtfdrwtf 33 drwtfV , will thus decrease with time, since aaVV a a acoustical energy is (slowly) leaking out of the room through the opening of area A. -

Measurement of Total Sound Energy Density in Enclosures at Low Frequencies Abstract of Paper
View metadata,Downloaded citation and from similar orbit.dtu.dk papers on:at core.ac.uk Dec 17, 2017 brought to you by CORE provided by Online Research Database In Technology Measurement of total sound energy density in enclosures at low frequencies Abstract of paper Jacobsen, Finn Published in: Acoustical Society of America. Journal Link to article, DOI: 10.1121/1.2934233 Publication date: 2008 Document Version Publisher's PDF, also known as Version of record Link back to DTU Orbit Citation (APA): Jacobsen, F. (2008). Measurement of total sound energy density in enclosures at low frequencies: Abstract of paper. Acoustical Society of America. Journal, 123(5), 3439. DOI: 10.1121/1.2934233 General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. WEDNESDAY MORNING, 2 JULY 2008 ROOM 242B, 8:00 A.M. TO 12:40 P.M. Session 3aAAa Architectural Acoustics: Case Studies and Design Approaches I Bryon Harrison, Cochair 124 South Boulevard, Oak Park, IL, 60302 Witew Jugo, Cochair Institut für Technische Akustik, RWTH Aachen University, Neustrasse 50, 52066 Aachen, Germany Contributed Papers 8:00 The detailed objective acoustic parameters are presented for measurements 3aAAa1. -
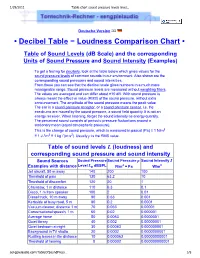
Table Chart Sound Pressure Levels Level Sound Pressure
1/29/2011 Table chart sound pressure levels level… Deutsche Version • Decibel Table − Loudness Comparison Chart • Table of Sound Levels (dB Scale) and the corresponding Units of Sound Pressure and Sound Intensity (Examples) To get a feeling for decibels, look at the table below which gives values for the sound pressure levels of common sounds in our environment. Also shown are the corresponding sound pressures and sound intensities. From these you can see that the decibel scale gives numbers in a much more manageable range. Sound pressure levels are measured without weighting filters. The values are averaged and can differ about ±10 dB. With sound pressure is always meant the effective value (RMS) of the sound pressure, without extra announcement. The amplitude of the sound pressure means the peak value. The ear is a sound pressure receptor, or a sound pressure sensor, i.e. the ear-drums are moved by the sound pressure, a sound field quantity. It is not an energy receiver. When listening, forget the sound intensity as energy quantity. The perceived sound consists of periodic pressure fluctuations around a stationary mean (equal atmospheric pressure). This is the change of sound pressure, which is measured in pascal (Pa) ≡ 1 N/m2 ≡ 1 J / m3 ≡ 1 kg / (m·s2). Usually p is the RMS value. Table of sound levels L (loudness) and corresponding sound pressure and sound intensity Sound Sources Sound PressureSound Pressure p Sound Intensity I Examples with distance Level Lp dBSPL N/m2 = Pa W/m2 Jet aircraft, 50 m away 140 200 100 Threshold of pain -

A Revised Sound Energy Theory Based on a New Formula for the Reverberation Radius in Rooms with Non-Diffuse Sound Field
ARCHIVES OF ACOUSTICS Copyright c 2015 by PAN – IPPT Vol. 40, No. 1, pp. 33–40 (2015) DOI: 10.1515/aoa-2015-0005 A Revised Sound Energy Theory Based on a New Formula for the Reverberation Radius in Rooms with Non-Diffuse Sound Field Higini ARAU-PUCHADES(1), Umberto BERARDI(2) (1) ArauAcustica Barcelona, Spain (2) Department of Architectural Science, Ryerson University Toronto, Canada; e-mail: [email protected] (received November 9, 2014; accepted November 20, 2014 ) This paper discusses the concept of the reverberation radius, also known as critical distance, in rooms with non-uniformly distributed sound absorption. The reverberation radius is the distance from a sound source at which the direct sound level equals the reflected sound level. The currently used formulas to calculate the reverberation radius have been derived by the classic theories of Sabine or Eyring. However, these theories are only valid in perfectly diffused sound fields; thus, only when the energy density is constant throughout a room. Nevertheless, the generally used formulas for the reverberation radius have been used in any circumstance. Starting from theories for determining the reverberation time in non- diffuse sound fields, this paper firstly proposes a new formula to calculate the reverberation radius in rooms with non-uniformly distributed sound absorption. Then, a comparison between the classic formulas and the new one is performed in some rectangular rooms with non-uniformly distributed sound absorption. Finally, this paper introduces a new interpretation of the reverberation radius in non-diffuse sound fields. According to this interpretation, the time corresponding to the sound to travel a reverberation radius should be assumed as the lower limit of integration of the diffuse sound energy. -

TRADE/CEFACT/2005/24 Recommendation No. 20
Annex I (Normative) Units of Measure: Code elements listed by Quantity (SI and SI equivalent units) The table column titled “Level/Category” identifies the normative relevance of the unit: level 1 – normative = SI normative units, standard and commonly used multiples level 2 – normative equivalent = SI normative equivalent units (UK, US, etc.) and commonly used multiples level 3 – informative units omitted from this normative annex but found in the informative annexes, Annex II and Annex III Quantity ST Level/ Name Representation symbol Conversion factor to SI Common Category Description Code Space and Time angle (plane) | 1 radian rad m x m⁻¹ = 1 C81 | 1S milliradian mrad 10⁻³ rad C25 | 1S microradian µrad 10⁻⁶ rad B97 #| 1 degree [unit of angle] 1,745 329 x 10⁻² rad DD #| 1 minute [unit of angle] ' 2,908 882 x 10⁻⁴ rad D61 #| 1 second [unit of angle] " 4,848 137 x 10⁻⁶ rad D62 D 2 grade = gon A91 | 2 gon gon 1,570 796 x 10⁻² rad A91 solid angle | 1 steradian sr m² x m⁻² = 1 D27 length, | 1 metre m m MTR breadth | 1M decimetre dm 10⁻¹ m DMT height | 1S centimetre cm 10⁻² m CMT thickness, | 1S micrometre (micron) µm 10⁻⁶ m 4H radius, | 1S millimetre mm 10⁻³ m MMT radius of curvature | 1M hectometre hm 10² m HMT cartesian coordinates X 1S kilometre km 10³ m KTM diameter, + 1S kilometre km 10³ m KMT length of path | 1S nanometre nm 10⁻⁹ m C45 distance | 1S picometre pm 10⁻¹² m C52 TRADE/CEFACT/2005/24 Recommendation No. 20 - Units of Measure used in International Trade Page 1/40 Annex I (Normative) Units of Measure: Code elements listed -

Comparative Representation of Sound Field Quantities
Comparative representation of sound field quantities and sound energy quantities Assumption: German: http://www.sengpielaudio.com/VergleichendeDarstellungVonSchall.pdf Air temperarature = 20°C: (Atmospheric pressure 10,1325 Pa = 1013 hectopascal) Density of air at 20°C: = 1.204 kg / m3 (At 0°C is = 1.293 kg/m3) Speed of sound at 20°C: c = 343 m / s (At 0°C is c = 331 m/s) UdK Berlin p Sengpiel Specific acoustic impedance Z at 20°C: Z = · c = = 413 N · s / m3 (At 0°C is Z = 428 N·s/m3) 05.93 v Sound Reference sound field quantities: –5 2 –5 Reference sound pressure p0 = 2 · 10 N / m = 2 · 10 Pa (Fixed "threshold of audibility") p0 p0 –8 –8 Reference sound velocity v0 = = = 5 · 10 m / s (= 4.854 · 10 m / s) c Z0 Reference sound energy quantities: 2 p0 2 –12 2 –12 2 Reference sound intensity J0 = = Z0 · v = 10 W / m (= 0.9685 · 10 W / m ) Z0 J p v Reference sound energy density E = 0 = 00 = 3 · 10–15 W · m / s3 (= 2.824 · 10–15 J / m3) 0 c c –12 2 –12 Reference acoustic power W0 = J 0 · A = 10 W = 1 pW bei A = 1 m (= 0.9685 · 10 W) >>> Given: A plane sound wave of f = 1 kHz and the N Sound pressure p = 1 Pa = 1 = 10 bar 94 dBSPL – We use always the RMS value. m2 Calculated: c 343 Wavelength = = = 0.343 m = 34,3 cm f 1000 1 Periodic length T = = 0.001 s = 1 ms f p 1 Sound velocity v = 2 · · f · = = = 2.42 . -

The Science and Applications of Acoustics the Science and Applications of Acoustics
THE SCIENCE AND APPLICATIONS OF ACOUSTICS THE SCIENCE AND APPLICATIONS OF ACOUSTICS SECOND EDITION Daniel R. Raichel CUNY Graduate Center and School of Architecture, Urban Design and Landscape Design The City College of the City University of New York With 253 Illustrations Daniel R. Raichel 2727 Moore Lane Fort Collins, CO 80526 USA [email protected] Library of Congress Control Number: 2005928848 ISBN-10: 0-387-26062-5 eISBN: 0-387-30089-9 Printed on acid-free paper. ISBN-13: 978-0387-26062-4 C 2006 Springer Science+Business Media, Inc. All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer Science+Business Media, Inc., 233 Spring Street, New York, NY 10013, USA), except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks, and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. Printed in the United States of America. (TB/MVY) 987654321 springeronline.com To Geri, Adam, Dina, and Madison Rose Preface The science of acoustics deals with the creation of sound, sound transmission through solids, and the effects of sound on both inert and living materials. As a mechanical effect, sound is essentially the passage of pressure fluctuations through matter as the result of vibrational forces acting on that medium. -

Sound Fields
Ch01-H6526.tex 19/7/2007 14: 2 Page 1 Chapter 1 Sound fields 1.1 Introduction his opening chapter looks at aspects of sound fields that are particularly relevant to sound insulation; the reader will also find that it has general applications to room Tacoustics. The audible frequency range for human hearing is typically 20 to 20 000 Hz, but we generally consider the building acoustics frequency range to be defined by one-third-octave-bands from 50 to 5000 Hz. Airborne sound insulation tends to be lowest in the low-frequency range and highest in the high-frequency range. Hence significant transmission of airborne sound above 5000 Hz is not usually an issue. However, low-frequency airborne sound insulation is of partic- ular importance because domestic audio equipment is often capable of generating high levels below 100 Hz. In addition, there are issues with low-frequency impact sound insulation from footsteps and other impacts on floors. Low frequencies are also relevant to façade sound insu- lation because road traffic is often the dominant external noise source in the urban environment. Despite the importance of sound insulation in the low-frequency range it is harder to achieve the desired measurement repeatability and reproducibility. In addition, the statistical assump- tions used in some measurements and prediction models are no longer valid. There are some situations such as in recording studios or industrial buildings where it is necessary to consider frequencies below 50 Hz and/or above 5000 Hz. In most cases it should be clear from the text what will need to be considered at frequencies outside the building acoustics frequency range. -
Generalized Acoustic Energy Density and Its Applications
Brigham Young University BYU ScholarsArchive Theses and Dissertations 2010-09-30 Generalized Acoustic Energy Density and Its Applications Buye Xu Brigham Young University - Provo Follow this and additional works at: https://scholarsarchive.byu.edu/etd Part of the Astrophysics and Astronomy Commons, and the Physics Commons BYU ScholarsArchive Citation Xu, Buye, "Generalized Acoustic Energy Density and Its Applications" (2010). Theses and Dissertations. 2339. https://scholarsarchive.byu.edu/etd/2339 This Dissertation is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. Generalized Acoustic Energy Density and Its Applications Buye Xu A dissertation submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Doctor of Philosophy Scott. D. Sommerfeldt, Chair Timothy W. Leishman Jonathon D. Blotter Kent L. Gee G. Bruce Schaalje Department of Physics and Astronomy Brigham Young University December 2010 Copyright c 2010 Buye Xu All Rights Reserved ABSTRACT Generalized Acoustic Energy Density and Its Applications Buye Xu Department of Physics and Astronomy Doctor of Philosophy The properties of acoustic kinetic energy density and total energy density of sound fields in lightly damped enclosures have been explored thoroughly in the literature. Their increased spatial uniformity makes them more favorable measurement quantities for various applica- tions than acoustic potential energy density (or squared pressure), which is most often used. In this dissertation, a new acoustic energy quantity, the generalized acoustic energy density (GED), will be introduced. -
Sound Intensity and Its Measurement and Applications
State of the Art of Sound Intensity and Its Measurement and Applications Finn Jacobsen Acoustic Technology, Ørsted@DTU, Technical University of Denmark, Building 352, DK-2800 Lyngby, Denmark The advent of sound intensity measurement systems in the beginning of the 1980s has had a significant influence on noise con- trol engineering. Today sound intensity measurements are routinely used in the determination of the sound power of machinery and other sources of noise in situ. Other important applications of sound intensity include the identification and rank ordering of partial noise sources, visualisation of sound fields, determination of the transmission losses of partitions, and determination of the radiation efficiencies of vibrating surfaces, and recent work suggests the possibility of measuring sound absorption in situ using sound intensity. This paper summarises the basic theory of sound intensity and its measurement and gives an overview of the state of the art in the various areas of application, with particular emphasis on recent developments. INTRODUCTION of the history of the development of sound intensity measurement is given in Frank Fahy’s monograph The most important acoustic quantity is certainly Sound Intensity [1]. the sound pressure. However, sources of sound emit The advent of sound intensity measurement sys- sound power, and sound fields are also energy fields tems in the 1980s has had a significant influence on in which potential and kinetic energies are generated, noise control engineering. Sound intensity measure- transmitted and dissipated. In spite of the fact that the ments make it possible to determine the sound power radiated sound power is a negligible part of the energy of sources without the use of costly special facilities conversion of almost any sound source, energy con- such as anechoic and reverberation rooms, and today siderations are of enormous practical importance in sound intensity measurements are routinely used in the acoustics.