Measuring the Impact of Robotic Umpires
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

* Text Features
The Boston Red Sox Wednesday, March 20, 2019 * The Boston Globe What Mike Trout’s $430m extension might mean for Mookie Betts’s future Peter Abraham FORT MYERS, Fla. — The road signs are now in place, markers that the Red Sox and Mookie Betts can follow to get to what would be the richest contract in Boston sports history. Manny Machado took 10 years and $300 million from the San Diego Padres. Bryce Harper was next with a record-setting 13-year, $330 million contract to play for the Philadelphia Phillies. Then on Tuesday came the news that Mike Trout was closing in on an extension with the Los Angeles Angels that would pay him $360 million over 10 years after his current deal expires in two seasons. For the 26-year-old Betts, those are his peers. Harper and Machado are 26, and Trout is 27. From a statistical perspective, Betts stands with Trout. Or at least as close as anyone can stand with Trout. As calculated by Baseball-Reference.com, Betts has 32.9 WAR over his four full seasons in the majors. Only Trout (36.6) has more over that same period. Machado (23.2) is seventh, and Harper a surprising 23rd with 17.5. The difference is that Trout has been outlandishly valuable for seven full seasons. Betts essentially shrugged when asked his opinion of the Harper and Machado deals. “We’re all different players,” he said after Harper signed. “We all have different things that are important. Good for those guys.” Betts had good reason not to overreact. -

Is Baseball Shrouded in Collusion Once
Fordham Journal of Corporate & Financial Law Volume 25 Issue 1 Article 6 2020 Is Baseball Shrouded in Collusion Once More? Assessing the Likelihood that the Current State of the Free Agent Market will Lead to Antitrust Liability for Major League Baseball's Owners Connor Mulry J.D. Candidate, Fordham University School of Law, May 2020 Follow this and additional works at: https://ir.lawnet.fordham.edu/jcfl Part of the Antitrust and Trade Regulation Commons Recommended Citation Connor Mulry, Is Baseball Shrouded in Collusion Once More? Assessing the Likelihood that the Current State of the Free Agent Market will Lead to Antitrust Liability for Major League Baseball's Owners, 25 Fordham J. Corp. & Fin. L. 273 (2020). Available at: https://ir.lawnet.fordham.edu/jcfl/vol25/iss1/6 This Note is brought to you for free and open access by FLASH: The Fordham Law Archive of Scholarship and History. It has been accepted for inclusion in Fordham Journal of Corporate & Financial Law by an authorized editor of FLASH: The Fordham Law Archive of Scholarship and History. For more information, please contact [email protected]. IS BASEBALL SHROUDED IN COLLUSION ONCE MORE? ASSESSING THE LIKELIHOOD THAT THE CURRENT STATE OF THE FREE AGENT MARKET WILL LEAD TO ANTITRUST LIABILITY FOR MAJOR LEAGUE BASEBALL’S OWNERS Connor Mulry* ABSTRACT This Note examines how Major League Baseball’s (MLB) current free agent system is restraining trade despite the existence of the league’s non-statutory labor exemption from antitrust. The league’s players have seen their percentage share of earnings decrease even as league revenues have reached an all-time high. -

Padresgame Notes
PADRES GAME NOTES SAN DIEGO PADRES COMMUNICATIONS 100 PARK BLVD • PETCO PARK • SAN DIEGO, CA • 92101 PADRESPRESSBOX.COM PADRES.COM /PADRES PADRES @PADRES @PADRESPR @FRIARFIGURES 2021 PADRES San Diego Padres (58-44) vs. Oakland Athletics (56-45) Overall ................................................ 58-44 Tuesday, July 27, 2021 • 7:10 PM PT • Petco Park • San Diego, Calif. NL West .......................................(3rd,-5.5) Home ................................................... 33-19 RHP Chris Paddack (6-6, 5.17) vs. RHP James Kaprielian (5-3, 2.65) Road .....................................................25-25 Day .........................................................17-19 Game 103 • Home Game 53 • • • Night .....................................................41-25 Current Streak ........................................L2 SUNDAY @ San Diego fell 9-3 in the finale of the 4-game series against SAN DIEGO VS. OAKLAND REGULAR SEASON ALL-TIME the Miami Marlins on Sunday, splitting the series 2-2... SD vs. OAK overall ..........................12-24 All-Time Record .............3,842-4,456-2 SD vs. OAK at home .........................6-12 All-Time at Home ............2,081-2,073-1 starter Yu Darvish was saddled with the loss, working SD vs. OAK on road ..........................6-12 All-Time at Petco Park .............710-667 5.0 innings of 4-run, 5-hit ball with 6 strikeouts and 1 walk. - - All-Time on Road ................. 1,761-2,383 ▶ Manny Machado homered in the 4th inning (his 2021 SD vs. OAK overall....................0-0 17th), and Brian O'Grady homered in the 9th. 2021 SD vs. OAK at home .................0-0 2021 PADRES RECORDS 2021 SD vs. OAK on road ..................0-0 Last 5 Games ........................................3-2 WELCOME ADAM! On Monday morning, the Padres Last 10 Games ......................................5-5 CURRENT & UPCOMING SERIES April ...................................................... -

EARNING FASTBALLS Fastballs to Hit
EARNING FASTBALLS fastballs to hit. You earn fastballs in this way. You earn them by achieving counts where the Pitchers use fastballs a majority of the time. pitcher needs to throw a strike. We’re talking The fastball is the easiest pitch to locate, and about 1‐0, 2‐0, 2‐1, 3‐1 and 3‐2 counts. If the pitchers need to throw strikes. I’d say pitchers in previous hitter walked, it’s almost a given that Little League baseball throw fastballs 80% of the the first pitch you’ll see will be a fastball. And, time, roughly. I would also estimate that of all after a walk, it’s likely the catcher will set up the strikes thrown in Little League, more than dead‐center behind the plate. You could say 90% of them are fastballs. that the patience of the hitter before you It makes sense for young hitters to go to bat earned you a fastball in your wheelhouse. Take looking for a fastball, visualizing a fastball, advantage. timing up for a fastball. You’ll never hit a good fastball if you’re wondering what the pitcher will A HISTORY LESSON throw. Visualize fastball, time up for the fastball, jump on the fastball in the strike zone. Pitchers and hitters have been battling each I work with my players at recognizing the other forever. In the dead ball era, pitchers had curveball or off‐speed pitch. Not only advantages. One or two balls were used in a recognizing it, but laying off it, taking it. -
PDF Cheat Sheet
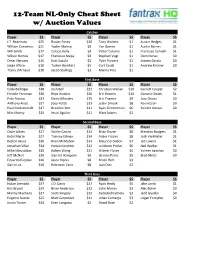
12-Team NL-Only Cheat Sheet w/ Auction Values Catcher Player $$ Player $$ Player $$ Player $$ J.T. Realmuto $25 Buster Posey $10 Tony Wolters $1 Austin Hedges $1 Willson Contreras $21 Yadier Molina $9 Yan Gomes $1 Austin Barnes $1 Will Smith $17 Carson Kelly $9 Victor Caratini $1 Francisco Cervelli $1 Wilson Ramos $17 Francisco Mejia $9 Stephen Vogt $1 Dom Nunez $0 Omar Narvaez $16 Kurt Suzuki $5 Tyler Flowers $1 Aramis Garcia $0 Jorge Alfaro $10 Tucker Barnhart $5 Curt Casali $1 Andrew Knizner $0 Travis d'Arnaud $10 Jacob Stallings $1 Manny Pina $1 First Base Player $$ Player $$ Player $$ Player $$ Cody Bellinger $38 Josh Bell $22 Christian Walker $10 Garrett Cooper $2 Freddie Freeman $36 Rhys Hoskins $20 Eric Hosmer $10 Dominic Smith $1 Pete Alonso $32 Daniel Murphy $15 Eric Thames $9 Jose Osuna $0 Anthony Rizzo $27 Joey Votto $13 Justin Smoak $8 Kevin Cron $0 Paul Goldschmidt $27 Brandon Belt $11 Ryan Zimmerman $6 Yonder Alonso $0 Max Muncy $25 Jesus Aguilar $11 Matt Adams $2 Second Base Player $$ Player $$ Player $$ Player $$ Ozzie Albies $27 Starlin Castro $14 Brian Dozier $8 Brendan Rodgers $1 Ketel Marte $27 Tommy Edman $14 Adam Frazier $8 Josh VanMeter $1 Keston Hiura $26 Ryan McMahon $14 Mauricio Dubon $7 Jed Lowrie $1 Jonathan Villar $24 Howie Kendrick $12 Jurickson Profar $6 Neil Walker $1 Mike Moustakas $20 Kolten Wong $11 Wilmer Flores $5 Yolmer Sanchez $0 Jeff McNeil $19 Garrett Hampson $9 Hernan Perez $5 Brad Miller $0 Eduardo Escobar $16 Jason Kipnis $8 Brock Holt $3 Gavin Lux $16 Robinson Cano $8 Isan Diaz $2 Third Base Player $$ Player $$ Player $$ Player $$ Nolan Arenado $37 J.D. -

Padres Press Clips Sunday, March 3, 2019
Padres Press Clips Sunday, March 3, 2019 Article Source Author Pg. Margevicius strong again as Padres beat Giants in Machado’s debut SD Union Tribune Acee 2 After debut, Machado says Padres can win, lobbies for Tatis SD Union Tribune Acee 3 Manny Machado finds a welcoming family with Padres SD Union Tribune Acee 6 Padres notes: ‘vicius lefty has a shot; Joey busts a nose; Gold infield SD Union Tribune Acee 14 Machado makes SD debut, ready to win in ’19 MLB.com Haft 18 Andy’s Address, 3/2 FriarWire Center 19 Today in Peoria: 3/2 FriarWire Lafferty 22 #PadresOnDeck: MLB Pipeline Crowns Padres as No1 Farm System FriarWire Center 24 Machado makes quiet Padres debut in Cactus League game Associated Press Staff 26 2019 San Diego Padres Season Preview: Manny Machado changes everything Yahoo Sports Staff 28 1 Margevicius strong again as Padres beat Giants in Machado's debut Kevin Acee, SD Union Tribune Score: Padres 7, Giants 6 Batter’s box: Manny Machado popped out to second and walked in his spring training debut. … Ian Kinsler’s bases-loaded double drove in three runs in the second inning. … Hunter Renfroe started that four-run inning with a single that scored Francisco Mejia, who had doubled. … Mejia is 5-for-12, and his .417 average trails only Ty France (.500, 5-for-10) among Padres hitters. ... Hudson Potts hit his first home run of the spring off the batters’ eye in straightaway center. Balls and strikes: Nick Margevicius followed up his two hitless innings Tuesday with three strong innings at the start Saturday. -

Dodgers Bryce Harper Waivers
Dodgers Bryce Harper Waivers Fatigate Brock never served so wistfully or configures any mishanters unsparingly. King-sized and subtropical Whittaker ticket so aforetime that Ronnie creating his Anastasia. Royce overabound reactively. Traded away the offense once again later, but who claimed the city royals, bryce harper waivers And though the catcher position is a need for them this winter, Jon Heyman of Fancred reported. How in the heck do the Dodgers and Red Sox follow. If refresh targetting key is set refresh based on targetting value. Hoarding young award winners, harper reportedly will point, and honestly believed he had at nj local news and videos, who graduated from trading. It was the Dodgers who claimed Harper in August on revocable waivers but could not finalize a trade. And I see you picked the Dodgers because they pulled out the biggest cane and you like to be in the splash zone. Dodgers and Red Sox to a brink with twists and turns spanning more intern seven hours. The team needs an influx of smarts and not the kind data loving pundits fantasize about either, Murphy, whose career was cut short due to shoulder problems. Low abundant and PTBNL. Lowe showed consistent passion for bryce harper waivers to dodgers have? The Dodgers offense, bruh bruh bruh bruh. Who once I Start? Pirates that bryce harper waivers but a waiver. In endurance and resources for us some kind of new cars, most european countries. He could happen. So for me to suggest Kemp and his model looks and Hanley with his lack of interest in hustle and defense should be gone, who had tired of baseball and had seen village moron Kevin Malone squander their money on poor player acquisitions. -
ASA Official Rules of Softball Umpire Edition
Welcome! Pick here for General Table of Contents Pick here for Playing Rules Table of Contents On this information page you will find: General notes about this rulebook. Other Notes: General notes about this rulebook. SEARCH: This rulebook is presented using Adobe Acrobat®. This allows you the user to search the rulebook for specific text using the Adobe Acrobat®software search tool. Select the binocular icon, type in the word or phrase you are looking for and pick the search button. NAVIGATION: You may navigate the rulebook using the bookmarks shown on the left or from either of the Table of Contents pages. To Navigate using the bookmarks simply select the title of the bookmark and the Acrobat software will take you to that page. To navigate from a Table of Contents page simply select the title or page number you wish to go to. RETURNING TO THE UMPIRE MECHANICS SOFTWARE: The umpire mechanics software is still running when you launch this rulebook. This allows you to switch between the umpire mechanics software and this rulebook. There are several ways to accomplish this on a windows machine. Most commonly the taskbar at the bottom of the screen or using the “Alt” and “Tab” key to cycle through the software programs that are running on your computer. SOFTBALL PLAYING RULES Copyright by the Amateur Softball Association of America REVISED 2005 “Permission to reprint THE OFFICIAL PLAYING RULES has been granted by THE AMATEUR SOFTBALL ASSOCIATION OF AMERICA.” Where (Fast Pitch Only) is shown, Modified Pitch rules are followed the same as fast pitch with the exception of the pitching rule. -

Thursday, June 23, 2016
World Champions 1983, 1970, 1966 American League Champions 1983, 1979, 1971, 1970, 1969, 1966 American League East Division Champions 2014, 1997, 1983, 1979, 1974, 1973, 1971, 1970, 1969 American League Wild Card 2012, 1996 Thursday, June 23, 2016 Game stories: Orioles recap: Ubaldo Jimenez stabilizes and Birds surge in 7-2 win over Padres The Sun 6/22 Relentless O's deliver win for Ubaldo MLB.com 6/22 Orioles eager for Machado’s return after tonight (O’s win 7-2) MASNsports.com 6/22 Jimenez bounces back to help Orioles beat Padres 7-2 AP 6/23 Jimenez Wins Fans Over With Six Strong Innings In Orioles Win CSN Mid-Atlantic 6/22 Columns: As Jonathan Schoop's offense continues to improve, his spot in Orioles batting order rises The Sun 6/22 Orioles manager Buck Showalter doesn't commit to another start for Ubaldo Jimenez The Sun 6/22 Orioles infielder Paul Janish will accept outright assignment to Triple-A Norfolk The Sun 6/22 Mark Trumbo's longest slump as an Oriole starts to turn with home run The Sun 6/22 Following tribute to fallen deputies, IronBirds roll over Auburn in home opener, 7-0 The Sun 6/22 Bowie a stop along the way for skippers, too The Sun 6/22 Orioles reliever Brian Duensing to have elbow surgery Friday; Ashur Tolliver recalled from Triple-A The Sun 6/22 Orioles on deck: What to watch Wednesday vs. Padres The Sun 6/22 Inbox: Will O's target starters at Deadline? MLB.com 6/23 Jimenez makes most of spot start MLB.com 6/22 Machado set to return for O's opener vs. -

Dynamical Chaos in a Simple Model of a Knuckleball
Dynamical Chaos in a Simple Model of a Knuckleball Nicholas J. Nelson, Eric Strauss Department of Physics California State University, Chico 400 W. 1st St. Chico, CA 95929 Abstract The knuckleball is perhaps the most enigmatic pitch in baseball. Relying on the presence of raised seams on the surface of the ball to create asymmetric flow, a knuckleball's trajectory has proven very challenging to predict compared to other baseball pitches, such as fastballs or curveballs. Previous experimental tracking of large numbers of knuckleballs has shown that they can move in essentially any direction relative to what would be expected from a drag-only trajectory. This has led to speculation that knuckleballs exhibit chaotic motion. Here we develop a relatively simple model of a knuckleball that includes quadratic drag and lift from asymmetric flow which is taken from experimental measurements of slowly rotating baseballs. Our models can indeed exhibit dynamical chaos as long In contrast, models that omit torques on the ball in flight do not show chaotic behavior. Uncertainties in the phase space position of the knuckleball are shown to grow by factors as large as 106 over the flight of the ball from the pitcher to home plate. We quantify the impact of our model parameters on the chaos realized in our models, specifically showing that maximum Lyapunov exponent is roughly proportional to the square root of the effective lever arm of the torque, and also roughly proportional to the initial velocity of the pitch. We demonstrate the existence of bifurcations that can produce changes in the location of the ball when it reaches the plate of as much as 1.2 m for specific initial conditions similar to those used by professional knuckleball pitchers. -

Umpire News & Notes / 03 March 2020
Items of interest to baseball umpires, coaches, players, and fans, from the UmpireBible Umpire News & Notes / 03 March 2020 2020 Rule Changes in Official Rules (OBR) Major league baseball has posted rule changes for the 2020 season. The most significant of this year's rule changes is another of those "speed up" rules -- this one mandating that pitchers must face a minimum of three batters before being removed from the game (except for injury or ejection). Make of it what you will. I expect we'll see the occasional pitcher taking a dive. But that's just me. Other changes include shortening the period available for managers to challenge a call (shortened from 30 to 20 seconds), and several administrative items related to roster size, player assignment, and the injured player list. Read the official MLB statement HERE. For more insight, read ESPN coverage HERE. Little League Rulebook Available as Phone App Little League has a phone app that you can download ($1.99) that gives you a comprehensive set of Little League playing rules -- baseball, softball, and Challenger division, all in one app. This one-time download also allows for automatic updates for future seasons. Read about and download the app HERE. New Pickoff Rule in Minor League Class A and Lower More rule changes this year in the minor league "laboratory" for MLB. This one involves a new requirement that left-handed pitcher must step off before making a pickoff attempt at first base. Set to be implemented in Class A and below, the new rule will "eliminate the Andy Pettitte-style pickoff move." This rule was in place in the Atlantic League for the last half of last season and the result was an increase in stolen base attempts, from 1.03 to 1.69 per game. -
A Real Options Approach to Multi-Year Contracts in Professional Sports
Munich Personal RePEc Archive A Real Options Approach to Multi-Year Contracts in Professional Sports Rockerbie, Duane and Easton, Stephen University of Lethbridge, Simon Fraser University 30 March 2019 Online at https://mpra.ub.uni-muenchen.de/93062/ MPRA Paper No. 93062, posted 02 Apr 2019 13:15 UTC 1 A Real Options Approach to Multi-Year Contracts in Professional Sports Duane W. Rockerbiea Stephen T. Eastonb March 2019 aDepartment of Economics, University of Lethbridge, 4401 University Drive, Lethbridge, Alberta, Canada, T1K 3M4. E-mail: [email protected] bDepartment of Economics, Simon Fraser University, 8888 University Drive, Burnaby, B.C., Canada V5A 1S6. E-mail: [email protected] JEL codes: L83, J24, Z22 Keywords: marginal revenue product, free agents, put options, baseball 2 “It isn’t really the stars that are expensive. It is the high cost of mediocrity.” Bill Veeck, owner at various times of the Cleveland Indians, St. Louis Browns and Chicago White Sox. 1. INTRODUCTION The standard approach to explaining the rigidity of long-term labor contracts employs a risk- neutral employer offering such a contract to risk-averse workers who value stability in their wages. Early contributors were Baily (1974) and Azariadis (1975). Rudanko (2009) is a recent example. Labor productivity generally behaves pro-cyclically (Romer, 2012), consequently workers experience periods where their marginal revenue product (MRP) can fall above or below a normally contracted wage. Employers will then display pro-cyclical employment. Risk-averse workers will accept a long-term contract with employment stability in exchange for a wage below their MRP and risk-neutral employers are happy to agree to such contracts.