Reinventing Space Conference 2018
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sab 2012 Mecbpn
Dos-Santos,W.A., et al. PROPOSTA DE UMA MISSÃO ESPACIAL PARA PICOSATÉLITES E ... PROPOSTA DE UMA MISSÃO ESPACIAL COMPLETA PARA PICOSATÉLITES E NANOSATÉLITES UTILIZANDO LANÇADORES NACIONAIS Walter Abrahão dos Santos, Fernanda Sayuri Yamasaki, Wilson Yamaguti Instituto Nacional de Pesquisas Espaciais – Av. dos Astronautas,1758 - CP515 - CEP 12227-010 São José dos Campos - SP, [email protected] , [email protected] , [email protected] Flávio de Azevedo Corrêa Jr. Instituto de Aeronáutica e Espaço – DCTA/IAE/SESP/PE, Praça Mal. Eduardo Gomes, 50 - Vila das Acácias, 12.228-904 - São José dos Campos - SP - Brasil - [email protected] Resumo: Devido ao mercado emergente de aplicações para pico e nanosatélites nas áreas de Espaço e Defesa, este trabalho se inspira na Missão Espacial Completa Brasileira (MECB), um programa conjunto de satélites e lançadores brasileiros, para propor um programa indutor de lançadores e plataformas voltados para satélites miniaturizados com missões sofisticadas devido a avanços em nanotecnologia e computação, entre outros. O trabalho considera dois grandes segmentos: (1) o segmento de lançadores focado na análise de viabilidade de veículos lançadores de pequenas cargas a uma altitude de aproximadamente 300 km e (2) o segmento relativo aos satélites objetivando embarcar cargas úteis com as seguintes aplicações em vista: um radiômetro, uma microcâmera e formação em voo. A análise foi basicamente concentrada nos envelopes de massa, tamanho, potência. A sustentabilidade do programa para estes satélites requer um acesso barato e regular ao espaço e é atrativa pela projeção futura deste nicho de mercado que pode contribuir com objetivos estratégicos do país. -

Analysis of Planetary and Solar-Induced Perturbations on Trans-Martian Trajectory of Mars Missions Before and After Mars Orbit Insertion
Analysis of planetary and solar-induced perturbations on trans-Martian trajectory of Mars missions before and after Mars orbit insertion V U J Nwankwo1 and S K Chakrabarti1,2* 1S N Bose National Centre for Basic Sciences, Kolkata 700 098, West Bengal, India 2Indian Center for Space Physics, Kolkata 700 084, West Bengal, India Abstract: Interplanetary missions are susceptible to gravitational and nongravitational perturbing forces at every tra- jectory phase, assuming, of course, that the man made rockets and thrusters work as expected. These forces are mainly due to planetary and solar-forcing-induced perturbations during geocentric, heliocentric and Martian trajectories, and before orbit insertion. In this study, we review and/or analyze Mars orbiters mission associated perturbing forces and their possible impacts before Mars Orbit Insertion viz Earth’s oblateness, Third body (solar and lunar), solar radiation pressure, solar energetic radiation environment and atmospheric drag forces. We also model the significance of atmospheric drag force on Mangalyaan Mars orbiter mission, as a function of appropriate space environmental parameters during its 28 days in Earth’s orbit (around and during perigee passage), 300 days of heliocentric and 100 days of Martian trajectory. We have found that for a total perigee height boost of about 250 km, the cumulative orbit decay can be approximately 720 m. The approximate altitude variation could be up to 158 m with respect to the sun during 300 days of interplanetary journey toward Mars. After Mars orbit insertion, the total decay experienced by the spacecraft could be up to 701 m with decay rate of up to 9 m/day during 100 days of Martian trajectory, based on Mars–Earth atmosphere density ratio. -
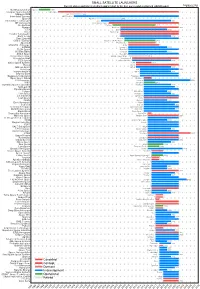
Small Satellite Launchers
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/04/20 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Kuaizhou-1A (Fei Tian 1) 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT -

SHOW DAILY SHOW Aug
Aug. 8, 2019 • Visit us at 239T DAY 3 SHOW DAILY OFFICIAL SHOW DAILY OF THE 33RD AIAA/USU CONFERENCE ON SMALL SATELLITES NASA seeking proposals for cubesats on second SLS launch ASA is soliciting proposals to fly cubesats on the second flight of its Space Launch N System, even as those cubesats chosen for the first SLS launch patiently await their ride. At an agency town hall meeting during the Conference on Small Satellites Aug. 5, Renee Cox, deputy manager for SLS payload integration at NASA’s Marshall Space Flight Center, said the agency was planning to fly cubesats on Artemis 2, the second flight of the SLS, tentatively sched- uled for 2022. “Recently we achieved a level of maturity that has allowed us to identify performance margin, so that means we get to fly cubesats,” she said of the decision to add cubesats to the mission. NASA announced in 2016 it would fly 13 cubesats on the first SLS mission, originally called Explora- tion Mission (EM) 1 and renamed Artemis 1 earlier this year. Those satellites include NASA-funded science and technology demonstration missions, payloads from international partners and compet- itors in the Cube Quest Challenge competition. As with the Artemis 1 mission, the cubesats flying on Artemis 2 will be mounted on the inside of a stage adapter ring between the SLS upper stage and the Orion spacecraft, and will be de- Renee Cox, deputy manager for SLS payload integration, at SmallSat on Wednesday holds a model of an adapter ployed after Orion separates. Unlike Artemis 1, ring that can accomodate six-unit and 12-unit cubesats between the SLS upper stage and Orion spacecraft. -

PPS01-P08 Japan Geoscience Union Meeting 2016
PPS01-P08 Japan Geoscience Union Meeting 2016 Statistical study of the response of Jovian EUV aurora to the solar wind from Hisaki observations Hajime Kita1, Tomoki Kimura2, Chihiro Tao3, *Fuminori Tsuchiya1, Hiroaki Misawa1, Takeshi Sakanoi1, Yasumasa Kasaba1, Go Murakami4, Kazuo Yoshioka5, Atsushi Yamazaki4, Ichiro Yoshikawa6 1.Graduate School of Science, Tohoku University, 2.Nishina-Center for Accelerator Based Science, RIKEN, 3.National Institute of Information and Communications Technology, 4.Institute of Space and Astronautical Science, Japan Aerospace Exploration Agency, 5.Department of Earth and Planetary Science, Graduate School of Science, University of Tokyo, 6.Department of Complexity Science and Engineering, University of Tokyo In order to reveal the solar wind response of Jovian extreme ultraviolet (EUV) auroral activity, we made a statistical analysis of Jovian EUV aurora obtained from long term Hisaki observation. The EUV emission from hydrogen molecule is excited by collision with high energy electron. The main oval is one of the components of Jovian EUV aurora where the auroral particle precipitations are caused by the rotationally driven field-aligned current system. It is theoretically expected that angular velocity of magnetospheric plasma increases when the Jovian magnetosphere is compressed by enhanced solar wind pressure, which decreases the field-aligned current. Regarding this scenario, increase of the solar wind dynamic pressure is expected to be anti-correlated with the intensity of the EUV aurora. A previous observation such as that by International Ultraviolet Explorer (IUE) or Hubble Space Telescope (HST) showed the time variability of the EUV aurora, while their data still limited in continuity over solar wind variation with good time resolution. -

Redalyc.Status and Trends of Smallsats and Their Launch Vehicles
Journal of Aerospace Technology and Management ISSN: 1984-9648 [email protected] Instituto de Aeronáutica e Espaço Brasil Wekerle, Timo; Bezerra Pessoa Filho, José; Vergueiro Loures da Costa, Luís Eduardo; Gonzaga Trabasso, Luís Status and Trends of Smallsats and Their Launch Vehicles — An Up-to-date Review Journal of Aerospace Technology and Management, vol. 9, núm. 3, julio-septiembre, 2017, pp. 269-286 Instituto de Aeronáutica e Espaço São Paulo, Brasil Available in: http://www.redalyc.org/articulo.oa?id=309452133001 How to cite Complete issue Scientific Information System More information about this article Network of Scientific Journals from Latin America, the Caribbean, Spain and Portugal Journal's homepage in redalyc.org Non-profit academic project, developed under the open access initiative doi: 10.5028/jatm.v9i3.853 Status and Trends of Smallsats and Their Launch Vehicles — An Up-to-date Review Timo Wekerle1, José Bezerra Pessoa Filho2, Luís Eduardo Vergueiro Loures da Costa1, Luís Gonzaga Trabasso1 ABSTRACT: This paper presents an analysis of the scenario of small satellites and its correspondent launch vehicles. The INTRODUCTION miniaturization of electronics, together with reliability and performance increase as well as reduction of cost, have During the past 30 years, electronic devices have experienced allowed the use of commercials-off-the-shelf in the space industry, fostering the Smallsat use. An analysis of the enormous advancements in terms of performance, reliability and launched Smallsats during the last 20 years is accomplished lower prices. In the mid-80s, a USD 36 million supercomputer and the main factors for the Smallsat (r)evolution, outlined. -

Theoretical and Experimental Investigation of Hall Thruster Miniaturization by Noah Zachary Warner
Theoretical and Experimental Investigation of Hall Thruster Miniaturization by Noah Zachary Warner S.B., Aeronautics and Astronautics, Massachusetts Institute of Technology, 2001 S.M., Aeronautics and Astronautics, Massachusetts Institute of Technology, 2003 SUBMITTED TO THE DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY JUNE 2007 © 2007 Massachusetts Institute of Technology. All rights reserved. Signature of Author . Department of Aeronautics and Astronautics May 25, 2007 Certified by . Manuel Martínez-Sánchez Professor of Aeronautics and Astronautics Thesis Supervisor Certified by . Jack Kerrebrock Professor Emeritus of Aeronautics and Astronautics Certified by . Oleg Batishchev Principal Research Scientist in Aeronautics and Astronautics Certified by . Vladimir Hruby President, Busek Company, Inc. Accepted by . Jaime Peraire Professor of Aeronautics and Astronautics Chair, Committee on Graduate Students 2 Theoretical and Experimental Investigation of Hall Thruster Miniaturization by Noah Zachary Warner Submitted to the Department of Aeronautics and Astronautics on May 25, 2007 in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Aeronautics and Astronautics in the field of Space Propulsion ABSTRACT Interest in small-scale space propulsion continues to grow with the increasing number of small satellite missions, particularly in the area of formation flight. Miniaturized Hall thrusters have been identified as a candidate for lightweight, high specific impulse propul- sion systems that can extend mission lifetime and payload capability. A set of scaling laws was developed that allows the dimensions and operating parameters of a miniaturized Hall thruster to be determined from an existing, technologically mature baseline design. -

2019 Astrophysics Senior Review Senior Review Subcommittee Report
2019 Astrophysics Senior Review Senior Review Subcommittee Report 2019 Astrophysics Senior Review - Senior Review Subcommittee Report June 4-5, 2019 SUBCOMMITTEE MEMBERS Dr. Alison Coil, University of California San Diego Dr. Megan Donahue, Michigan State University Dr. Jonathan Fortney, University of California Santa Cruz Ms. Maura Fujieh, NASA Ames Research Center Dr. Roberta Humphreys, University of Minnesota Dr. Mark McConnell, University of New Hampshire / Southwest Research Institute Dr. John O’Meara, Keck Observatory Dr. Rebecca Oppenheimer, American Museum of Natural History Dr. Alexandra Pope, University of Massachusetts Amherst Dr. Wilton Sanders, NASA/University of Wisconsin-Madison, retired Dr. David Weinberg, The Ohio State University - Chair 1 EXECUTIVE SUMMARY The eight missions evaluated by the 2019 Astrophysics Senior Review constitute a portfolio of extraordinary scientific power, on topics that range from the atmospheres of planets around nearby stars to the nature of the dark energy that drives the accelerating expansion of the cosmos. The missions themselves range from the venerable Great Observatories Hubble and Chandra to the newest Explorer missions NICER and TESS. All of these missions are operating at a high level technically and scientifically, and all have sought ways to make their operations cost-efficient and their data valuable to a broad community. The complementary nature of these missions makes the overall capability of the portfolio more than the sum of its parts, and many of the most exciting developments in contemporary astrophysics draw on observations from several of these observatories simultaneously. The Senior Review Subcommittee recommends that NASA continue to operate and support all eight of these missions. -

Securing Japan an Assessment of Japan´S Strategy for Space
Full Report Securing Japan An assessment of Japan´s strategy for space Report: Title: “ESPI Report 74 - Securing Japan - Full Report” Published: July 2020 ISSN: 2218-0931 (print) • 2076-6688 (online) Editor and publisher: European Space Policy Institute (ESPI) Schwarzenbergplatz 6 • 1030 Vienna • Austria Phone: +43 1 718 11 18 -0 E-Mail: [email protected] Website: www.espi.or.at Rights reserved - No part of this report may be reproduced or transmitted in any form or for any purpose without permission from ESPI. Citations and extracts to be published by other means are subject to mentioning “ESPI Report 74 - Securing Japan - Full Report, July 2020. All rights reserved” and sample transmission to ESPI before publishing. ESPI is not responsible for any losses, injury or damage caused to any person or property (including under contract, by negligence, product liability or otherwise) whether they may be direct or indirect, special, incidental or consequential, resulting from the information contained in this publication. Design: copylot.at Cover page picture credit: European Space Agency (ESA) TABLE OF CONTENT 1 INTRODUCTION ............................................................................................................................. 1 1.1 Background and rationales ............................................................................................................. 1 1.2 Objectives of the Study ................................................................................................................... 2 1.3 Methodology -

Earth to Mars Areostationary Mission Optimization Analysis
Earth to Mars areostationary mission optimization analysis M. M. Sánchez-García, G. Barderas and P. Romero Instituto de Matemática Interdisciplinar. U. D. Astronomía y Geodesia, Facultad de Ciencias Matemáticas, Universidad Complutense de Madrid, Madrid, Spain ([email protected], [email protected], [email protected]) Abstract Mars has become one of the priorities in the planetary exploration programs. The analysis of space mission costs has become a key factor in mission planning. The determination of optimal trajectories aiming to lower costs in terms of impulses allows for more massive payloads to be transported at a minimum energy cost. Areostationary satellites are considered the most efficient and robust candidates to satisfy the control needs of the missions to Mars. Mars Areostationary Relay Satellites providing continuous coverage of a specific region of Mars are being considered for a near future. In this work, we analyze the optimization of an areostationary mission. We first determine the launch and arrival dates for an optimal minimum energy Earth-Mars transfer trajectory. Then, the minimum thrust maneuvers to capture the spacecraft from the hyperbolic arrival trajectory to Mars and place it in the areostationary orbit are analyzed. XIV.0 Reunión Científica 13-15 julio 2020 Context of the research: Previous studies The number of missions to Mars has increased over the last years, particularly robotic missions which need to be tele- commanded from the Earth. The need to control the different missions in Mars in almost real time with a relay system that provides continuous coverage of a specific region has been proposed by several authors such as Edwards et al. -

The Active Space Debris Removal Mission Removedebris. Part 1: from Concept to Launch
Manuscript File The active space debris removal mission RemoveDebris. Part 1: from concept to launch Jason L. Forshaw1, Guglielmo S. Aglietti2, Simon Fellowes Surrey Space Centre, University of Surrey, Guildford, UK Thierry Salmon Ariane Group, Bordeaux, France Ingo Retat a , Alexander Hall b , Thomas Chabot c , Aurélien Pisseloup c Airbus: a Bremen, Germany; b Stevenage, UK; c Toulouse, France Daniel Tye Surrey Satellite Technology Limited (SSTL), Guildford, UK Cesar Bernal f , François Chaumette g , Alexandre Pollini h , Willem H. Steyn i f Innovative Solutions In Space (ISIS), Netherlands; g Inria, France; h CSEM, Switzerland; i Stellenbosch University, South Africa ABSTRACT This is the first of two companion papers that describe the development of the RemoveDEBRIS; mission. This first article focusses on the mission design and hardware development up to the delivery of the spacecraft to the launch authority. The Secord article describes the in-orbit operations. The European Commission funded RemoveDebris mission has been the world’s first Active Debris Removal (ADR) missions to demonstrate, in orbit, some cost effective key technologies, including net and harpoon capture; and elements of the whole sequence of operations, like the vision-based navigation, ultimately planning to terminate the mission with the deployment of the dragsail to de-orbit the craft. The mission has utilized two 2U CubeSats as artificial debris targets released from the main 100 kg satellite, to demonstrate the various technologies. This paper examines the design of the mission from initial concepts through to Manufacture, Assembly Integration and Testing of the payloads, up to launch, and apart from a general consideration of the mission, will focus on the elements of design and testing that differ from a conventional mission. -

Caithness and North Sutherland Regeneration Partnership
Agenda Item 12 Report No EDI/48/18 HIGHLAND COUNCIL Environment, Development and Infrastructure Committee: Date: 16 August 2018 Report Title: Caithness and North Sutherland Regeneration Partnership Report By: Director of Development and Infrastructure 1. Purpose/Executive Summary 1.1 The purpose of this report is to provide Committee Members with an update on the activities being taken forward through the Caithness and North Sutherland Regeneration Partnership (CNSRP). 2. Recommendations 2.1 Members are asked to: i. note progress to date; ii. welcome news of funding for the proposed Sutherland spaceport; and iii. agree to support efforts designed to improve flight connectivity at Wick John O’Groats airport. 3. Introduction 3.1 Caithness and North Sutherland Regeneration Partnership was set up in late 2007 as an informal partnership of the main bodies with an economic and socio-economic remit in the Caithness and North Sutherland area. Its aim is to coordinate and lead the response to the socio-economic impacts associated with the decommissioning of the Dounreay nuclear site. The partners are The Highland Council, Highlands and Islands Enterprise, Skills Development Scotland, Caithness Chamber of Commerce, The Scottish Government, Cavendish Dounreay Partnership and The Nuclear Decommissioning Authority. 3.2 There are two levels of governance, an advisory board, consisting of local agencies and community representatives, and an executive group of Chief Executives and Senior Officials, including the Scottish Government. The latter was chaired, until recently, by Sir Anthony Cleaver, and will be chaired for the next 3 years by former Councillor, Iain Ross. 3.3 The contract to manage the closure of the Dounreay site was awarded in 2012 to a private sector consortium (the Cavendish Dounreay Partnership), and the current estimate is that the site will reach its “interim end-state” by 2030-2033.