Shallow Water Effects on Ship Underwater Noise Measurements
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Arctech – High-Rolling in the High Arctic
Shipyard There are several projects for real ” icebreakers and other vessels with heavy ice classes, and Arctech is naturally interested in these. he shipyard is completing an arctic tanker Arctech – project for Greek owners. The vessel is a condensate carrier with a high ice class (Arc7), representing a new generation High-rolling in of Arctic tankers capable of operating Tin the extremely cold-weather conditions and shal- low waters of the river estuaries along the Siberian the High Arctic coast. Sea trials are expected to take place in April. Arctech has delivered various ice-class vessels to The Arctech Helsinki Shipyard has a long Russian owners. According to Markku Kajosaari, SVP Sales, demand for such vessels is, unfortunately, tradition of Arctic expertise in icebreakers limited today. The shipyard is looking for new-build and high-ice-class cargo ships. The shipyard projects in which Arctech could use all the special currently has its sights on potential new capabilities of the Helsinki shipyard. “We have had several enquiries about small to orders of Russian LNG-powered icebreakers. medium-size cruise vessels intended for operations in remote areas and harsh conditions. These types of projects could be very suitable for us. There are also 26 26-27_Maritime_EN_Archtech.indd 26 1.4.2019 12.31 the contract. However, even in this case, there will be very tough competition, as we have seen many times before. There are several advanced Russian shipbuild- ers nowadays,” says Kajosaari, playing down specu- lation of possible new icebreaker orders in Helsinki. At the same time, there is strong demand for high ice-class cargo ships in the High Arctic but, unfortu- nately, some of these new vessels are so enormous that the facilities in Helsinki are not large enough. -
Polaris' Unique Concept Shines in Ice Trials
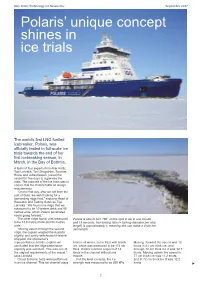
Aker Arctic Technology Inc Newsletter September 2017 Polaris’ unique concept shines in ice trials The world's first LNG fuelled icebreaker,Polaris , was officially tested in full-scale ice trials towards the end of her first icebreaking season, in March, in the Bay of Bothnia. A team of four experts from Aker Arctic: Topi Leiviskä, Toni Skogström, Tuomas Romu and Juha Alas oini, joined the vessel for five days to supervise the trials. The purpose of the ice trials was to ensure that thePolaris fulfils all design requirements. “On the first day, after we left from the port of Oulu, we went looking for a demanding ridge field,” explains Head of Research and Testing Services Topi Leiviskä. “We found one ridge that we measured to be 10 metres thick and 95 metres wide, whichPolaris penetrated easily going forward.” The other ridge found, was measured Polaris is able to turn 180° on the spot in ice in one minute to be 13.6 metres thick and 50 metres and 15 seconds. Her turning ratio (= turning diameter per ship wide. length) is approximately 1, meaning she can make a circle her “Moving astern through the second own length. ridge, the captain wiggled the Azipods slightly, and jointly with Arctech Helsinki shipyard, the shipowner's representatives and the captain we broken all winter, but is filled with brash Moving forward the speed was 12 concluded that the ridge penetration ice, which was measured to be 174 cm knots in 81 cm thick ice, and capacity was excellent. This was one of thick.Polaris reached a speed of 14 through 72 cm thick ice it was 12.7 the original requirements of the vessel,” knots in the channel without any knots. -
Icebreaker Polaris Begins Work Page 10
Aker Arctic Technology Inc Newsletter March 2017 Arctic Passion News 1 / 2017 / 13 Icebreaker Polaris begins work Page 10 Icebreaking needs and Model testing of Ice Harmonising model tests plans on the Northern Strengthened Lifeboat for power requirements Sea Route Page 11 Page 14 Page 4 Aker Arctic Technology Inc Newsletter March 2017 In this issue Page 2 From the Managing Director Dear Reader, Page 3 Finland to chair the Arctic Council Page 4 Icebreaking needs on the NSR The year 2017 is quite significant for Page 8 Will EEDI become tighter Finland when it comes to Arctic matters, Page 9 Polar Code training as Finland is taking the chairmanship in Page 10 Polaris begins work the Arctic Council, and the same year Page 11 Ice strengthened lifeboat celebrating the nation's centenary of testing independence. This results in a number Page 12 Basics about ice part 1 of special events that also affect our Page 14 Harmonising model tests businesses in the Arctic region. Although Page 16 Intelligent de-icing Aker Arctic is focusing on technical Page 17 News in brief matters and development of the Page 20 Christmas party in Åland solutions to be used in both Arctic and Meet us here other icebreaking vessels, administrative actions are of much interest to us. This year will show how the major and Announcements pioneering Arctic project, Sabetta Regulatory issues are developing. terminal, the first ever real Arctic LNG Alexey Shtrek has This is the first year of polar code project, is coming onstream. This project joined Aker Arctic as development implementation, and we also see is a great showcase of how the new manager. -
Polaris: Next Generation Observing Systems for the Polar Regions European Space Agency
User Needs and High-Level Requirements for Next Generation Observing Systems for the Polar Regions D1.1 Environmental Information Requirements Report February, 2016 Prepared for: European Space Agency Prepared by: Polar View Earth Observation Limited Polaris: Next Generation Observing Systems for the Polar Regions European Space Agency D1.1 Environmental Information Requirements Revision 2.1 February, 2016 REVISION HISTORY VERSION NAME COMPANY DATE OF CHANGES COMMENTS Release to team for 1.0 Ed Kennedy PVEO September, 2015 input 1.1 David Arthurs PVEO November, 2015 Reorganization 1.2 Ed Kennedy PVEO November, 2015 Additional edits 2.0 Ed Kennedy PVEO January, 2016 Release to ESA 2.1 Ed Kennedy PVEO February, 2016 Minor edits DISTRIBUTION LIST ORGANIZATION NAME NUMBER OF COPIES European Space Agency Ola Gråbak 1 electronic copy European Space Agency Arnaud Lecuyot 1 electronic copy Steering Committee 1 electronic copy Polaris: Next Generation Observing Systems for the Polar Regions European Space Agency D1.1 Environmental Information Requirements Revision 2.1 February, 2016 TABLE OF CONTENTS 1 INTRODUCTION .................................................................................................................. 1 2 STUDY METHODOLOGY ...................................................................................................... 2 3 DRIVERS OF INFORMATION REQUIREMENTS .................................................................... 5 3.1 Science Drivers .................................................................................................. -

Arctic Navigation: Stakes, Benefits and Limits of the Polaris System
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by MURAL - Maynooth University Research Archive Library ARCTIC NAVIGATION: STAKES, BENEFITS AND LIMITS OF THE POLARIS SYSTEM Laurent Fedi1, Laurent Etienne2, Olivier Faury3, Patrick Rigot-Müller4, Scott Stephenson5, and Ali Cheaitou6 1KEDGE BS, Marseille, CESIT, Maritime Governance, Trade and Logistics Lab, France 2Université de Tours, France 3EM Normandie, Métis Lab, Le Havre, France 4Maynooth University, Maynooth, Ireland 5University of Connecticut, United States of America 6SEAM Research Group and Industrial Engineering and Management Department, College of Engineering, University of Sharjah, United Arab Emirates ABSTRACT Ensuring safe navigation is paramount for the economic development of the Arctic. Aware of this strategic issue, the International Maritime Organization (IMO), supported by the Arctic coastal states, adopted the International Code for Ships Operating in Polar Waters (Polar Code) with a set of navigation tools including the well-known Polar Operational Limit Assessment Risk Indexing System (POLARIS). Designed for assessing operational capabilities for ships operating in ice, POLARIS is useful for various stakeholders such as the International Association of Classification Society (IACS) organizations and underwriters. Other important beneficiaries are shipowners and their crew. Even though POLARIS deals with topical issues, so far, this system has not been subjected to extensive studies of its capabilities and limitations. The aim of this analysis in hand is to assess the stakes, benefits and limits of POLARIS for Arctic navigation with a managerial approach and through the lens of risk assessment. Results show that POLARIS integrates various parameters to assess risk of navigation in ice, and that POLARIS can provide relevant managerial solutions to shipowners. -

2017 Annual Report
THE YEAR 2017 1 THE YEAR 2017 News in 2017 ......................................................................... 04 Arctia 2017 The year 2017 in figures ..................................................... 05 CEO’s review .......................................................................... 06 2 ARCTIA Operating environment ....................................................... 08 Core messages and organisation ......................................... 12 Corporate social responsibility management ..................... 17 Financial responsibility ......................................................... 22 Society and human rights .................................................... 25 RELIABLE SERVICES IN Environment ......................................................................... 29 3 SERVICES CHALLENGING CONDITIONS The Baltic Sea ........................................................................ 35 Polar and subpolar regions .................................................. 38 Oil spill preparedness and response .................................... 40 Arctia’s key task is to safeguard icebreaking operations and Harbour icebreaking ............................................................ 41 winter navigation in the Finnish marine areas. We offer our Arctia Events ......................................................................... 42 customers reliable maritime services in challenging conditions 4 PERSONNEL AND GOVERNANCE throughout the world. In 2017, we achieved all the service Personnel and governance -

Download Ship Data Card
Polaris The first LNG-powered icebreaker in the world Polaris represents a new generation of icebreakers. It is the world’s first icebreaker powered by liquefied natural gas (LNG). The use of both LNG and low sulphur diesel reduces the vessel’s emissions significantly, making it also the most environmentally friendly diesel- electric icebreaker ever built. Polaris is built and delivered by Arctech. Building began on March 4th 2015, Polaris is powered by Wärtsilä’s dual-fuel at the Helsinki Shipyard. engines operating on LNG and low sulphur diesel fuel. The concept design for the icebreaker was developed by Aker Arctic. The steel construction, special outfitting, oil recovery, interior Polaris will be a part of and deck outfitting design and Arctia’s versatile fleet of specifications were carried outby ILS. icebreakers. The built-in oil recovery system delivered by Lamor Corporation has a recovery capasity of 1 015 m³ with a rate of 200 m³/h. Technical specifications The vessel’s main task is fairway icebreaking on the Baltic Sea, which means assisting Length 110 m merchant vessels to and from Baltic Sea ports Breadth maximum 24 m in wintertime. In addition, Polaris can perform Operational draught 8 m oil spill response operations, emergency Displacement 3 000 t towing and rescue operations on the open Installed power 22 MW sea all year round. The unique vessel has been Propulsion power 19 MW designed for the most demanding icebreaking Speed 17 kn conditions on the Baltic Sea. The special hull Speed at 1.2 m ice 6 kn form and propulsion arrangement minimize Pollard pull 214 tn ice resistance and maximize the icebreaking Oil recovery capacity 1 015 m³ with capacity. -

Investment in the Baltic States
Investment in the Baltic States A comparative guide to investment in Estonia, Latvia and Lithuania KPMG in the Baltics © 2015 KPMG Baltics SIA, a Latvian limited liability company and a member firm of the KPMG network of independent member firms affiliated with KPMG International Cooperative (“KPMG International”), a Swiss entity. All rights reserved. Preface Investment in the Baltic States is one of a series of booklets published by KPMG to provide information to those considering investing or doing business in various countries. This publication has been prepared by KPMG in Estonia, Latvia and Lithuania to assist those contemplating investment or commencing operations in the Baltic states. KPMG in the Baltics provides audit, tax and advisory services for local and multinational companies, government entities and inward investors. The information in this booklet is of a general nature and should be used only as a guide for preliminary planning purposes. Because of the continually changing legislative environment in the Baltics, the complexity of corporate, tax and social laws and regulations in each country and the steadily evolving nature of the respective economies, comprehensive professional advice and assistance should always be obtained before implementing any plan to invest in or immigrate to the Baltic states. KPMG with more than 300 staff in the Baltic states can provide such assistance and would be pleased to provide more detailed information on matters discussed in this publication. Every care has been taken to ensure that the information presented in this edition is correct and accurate as of 1 April 2015. Revised edition Riga, April 2015 © 2015 KPMG Baltics SIA, a Latvian limited liability company and a member firm of the KPMG network of independent member firms affiliated with KPMG International Cooperative (“KPMG International”), a Swiss entity. -

Suomen Sotakorvausalukset 1944–1952
Suomen sotakorvausalukset 1944–1952 www.turso.fi www.slhy-laiva.fi Suomen sotakorvaukset Neuvostoliitolle toimitetut alukset “Voittajalle kuuluu vastustajan ruumis ja omaisuus”. istoa ympäri maata. Neuvostoliiton puolelta heidän Tämä vanha traditio otettiin uudelleen käyttöön valtuuskuntaansa johti kenraali Andrej Zhdanov. kun Suomi ja Neuvostoliitto 19. syyskuuta 1944 Neuvostoliiton organisaatio oli nimeltään Suomesta solmivat välirauhansopimuksen. Sopimuksen 11. Hankintoja Toimittava Hallinto. artiklan mukaisesti SuomI sopi korvaavansa Neu- Lähes koko sotakorvaustoimitusajan Suomen vostoliitolle sotatoimien ja Suomen joukkojen Neu- jäljellä olevat kauppalaivat oli sidottu Kamerton eli vostoliiton alueella miehitystoimista aiheutuneet Kauppamerenkulun Ohjaus ja Säännöstelytoimi- 300 miljoonan Yhdysvaltain dollarin vahingot kunnan hallintaan kuljettamaan metalli- ja metsä- kuudessa vuodessa. teollisuuden tuotteita Neuvostoliittoon. Näitä aluksia Sotakorvaustoimitukset määrättiin maksetta- käytettiin myös saksalaisten sotakorvausmateriaalin vaksi dollarin vuoden 1938 kurssin mukaan, joka kuljettamiseen Kaliningradiin ja Leningradiin. yllätti Suomen täysin. Sehän tarkoitti melkein kak- Lukuun ottamatta teräslevyjen hankalaa saan- sinkertaista korvausmäärää. tia Suomelle ei tuottanut suurta ongelmaa raken- taa teräksisiä höyry- ja moottorialuksia. Haasteelli- SOTAKORVAUSTEN PERUSSOPIMUS alle- simmiksi laivatyypeiksi muodostuivat suuret puiset kirjoitettiin 17. joulukuuta 1944. Tässä sopimuksessa koulukuunarit, kalastusalukset ja proomut. -

LNG Icebreaker Polaris Completed
Arctic Passion News No 12 September 2016 First LNG icebreaker Polaris The construction of Finland’s new icebreaker has been Polaris in sea trials in spring completed at Arctech Helsinki Shipyard. The, vesselPolaris , will 2016 outside Helsinki. be owned and operated by Arctia Ltd., a Finnish state owned company providing icebreaking services.She is the world's first LNG-fuelled icebreaker, which also makes her the most environmentally friendly icebreaker ever built.Polaris is based on the Aker ARC 130 concept developed by Aker Arctic in cooperation with ILS and the Finnish Transport Agency. Polaris is an exceptional icebreaker, as commercial vessels sailing on the Baltic andSisu are now forty years of age. she can exceed the performance of even Sea in terms of size and engine power," The ice belt is made of compound steel the highly regarded Finnish icebreakers project manager Mika Hovilainen says. with a stainless steel outer lining. It Urhoand Sisu built in the 1970s, which "Most likely, vessels will become longer requires less service and saves fuel due have been widely recognised as the and slimmer and be equipped with to reduced corrosion when compared to most capable icebreakers in northern smaller engines. In difficult ice normal steel coated with abrasion- Baltic conditions. The main purpose of conditions, these vessels will need more resistant paint. All the basic work in Polaris is icebreaking and assisting other assistance and towing needs will manufacturing the hull has been done vessels in difficult ice conditions in the increase in the future." with the long service life in mind and northern Gulf of Bothnia, where ice In the most challenging ice conditions everything is made in accordance with ridges can grow to over ten metres thick such as heavy ridges, contact towing is the highest quality standards. -
Finnish Solutions for the Entire Icebreaking Value Chain
FINNISH SOLUTIONS FOR THE ENTIRE ICEBREAKING VALUE CHAIN AN AMERICAN-FINNISH PARTNERSHIP 2 3 4 FINNISH SOLUTIONS FOR THE ENTIRE ICEBREAKING VALUE CHAIN TABLE OF 6 ICEBREAKING SOLUTIONS DELIVERED ON TIME AND ON BUDGET CONTENTS 8 THE POLAR MARITIME NETWORK IN FINLAND 12 RESEARCH 12 AALTO UNIVERSITY 14 DESIGN 14 AKER ARCTIC 18 BUILD 18 RAUMA MARINE CONSTRUCTIONS 22 OPERATE 22 ARCTIA 26 EQUIPMENT & SYSTEM SUPPLIERS / DIGITAL SERVICE PROVIDERS 28 LAMOR 30 ABB 32 NESTIX 34 WÄRTSILÄ 38 TRAFOTEK 40 MARIOFF 42 STARKICE 44 ICEYE 46 CRAFTMER 48 PEMAMEK 50 STEERPROP 52 NAVIDIUM 54 DANFOSS 56 POLARIS: THE FIRST LNG-POWERED ICEBREAKER IN THE WORLD 58 BENEFITS OF AN AMERICAN-FINNISH PARTNERSHIP PHOTO BY TIM BIRD 4 5 Finnish companies have designed about 80 percent of the world’s icebreakers, and about 60 percent of them have been built by Finnish shipyards. We have a creative and FINNISH agile polar maritime network that is known for delivering on schedule and on budget. We are also known for delivering sustainable, innovative and effective solutions SOLUTIONS for demanding tasks in Arctic conditions. Finland is the only nation in the world that offers ice- proven products and services with a solid, cost-effective FOR THE ENTIRE value chain. This value chain covers R&D, education, ship design, engineering, building, operation, program management and life cycle support services. Globally ICEBREAKING recognized Finnish companies and shipyards offer icebreaking solutions for the U.S polar icebreaker program that can be considered as a complete package or VALUE CHAIN configured as individual options to suit specific needs. -

Supplemental Contract INFORMATION TECHNOLOGY
Hillsborough County Aviation Authority Supplemental Contract INFORMATION TECHNOLOGY CONSULTING SERVICES COMPANY: POLARIS ASSOCIATES, INC. Term Date: August 1, 2019 through July 31, 2023 August 1, 2019 Prepared by: Procurement Department Hillsborough County Aviation Authority P.O. Box 22287 Tampa, Florida 33622 TABLE OF CONTENTS ARTICLE 1 CONTRACT 4 ARTICLE 2 SCOPE OF WORK 5 ARTICLE 3 TERM 6 ARTICLE 4 PAYMENTS 6 ARTICLE 5 TAXES 7 ARTICLE 6 NON-EXCLUSIVE 7 ARTICLE 7 ACCOUNTING RECORDS AND AUDIT REQUIREMENTS 8 ARTICLE 8 INSURANCE 9 ARTICLE 9 NON-DISCRIMINATION 11 ARTICLE 10 AUTHORITY APPROVALS 14 ARTICLE 11 DATA SECURITY 14 ARTICLE 12 COMPLIANCE WITH LAWS, REGULATIONS, ORDINANCES, RULES 15 ARTICLE 13 COMPLIANCE WITH CHAPTER 119, FLORIDA STATUTES PUBLIC RECORDS LAW 15 ARTICLE 14 NOTICES AND COMMUNICATIONS 16 ARTICLE 15 SUBORDINATION OF AGREEMENT 17 ARTICLE 16 SUBORDINATION TO TRUST AGREEMENT 17 ARTICLE 17 SECURITY BADGING 17 ARTICLE 18 VENUE 18 ARTICLE 19 PROHIBITION AGAINST CONTRACTING WITH SCRUTINIZED COMPANIES 18 ARTICLE 20 RELATIONSHIP OF THE PARTIES 19 ARTICLE 21 RIGHT TO AMEND 19 ARTICLE 22 FAA APPROVAL 19 ARTICLE 23 AGENT FOR SERVICE OF PROCESS 19 ARTICLE 24 INVALIDITY OF CLAUSES 20 ARTICLE 25 SEVERABILITY 20 ARTICLE 26 HEADINGS 20 ARTICLE 27 COMPLETE CONTRACT 20 ARTICLE 28 MISCELLANEOUS 21 ARTICLE 29 ORGANIZATION AND AUTHORITY TO ENTER INTO CONTRACT 21 ARTICLE 30 OWNERSHIP OF DOCUMENTS 21 ARTICLE 31 INDEMNIFICATION 21 Hillsborough County Aviation Authority Information Technology Consulting Services Issued: 7/12/2019 GSA Contract GS-35F-0547V Page 2 of 25 Polaris Associates, Inc. SUPPLEMENTAL CONTRACT EXHIBIT A GSA CONTRACT GS-35F-0547V EXHIBIT B WORK PLAN EXHIBIT C AUTHORITY POLICY P412, TRAVEL AND BUSINESS DEVELOPMENT EXPENSES EXHIBIT D SCRUTINIZED COMPANY CERTIFICATION Hillsborough County Aviation Authority Information Technology Consulting Services Issued: 7/12/2019 GSA Contract GS-35F-0547V Page 3 of 25 Polaris Associates, Inc.