Monte Carlo Integration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Kalman and Particle Filtering
Abstract: The Kalman and Particle filters are algorithms that recursively update an estimate of the state and find the innovations driving a stochastic process given a sequence of observations. The Kalman filter accomplishes this goal by linear projections, while the Particle filter does so by a sequential Monte Carlo method. With the state estimates, we can forecast and smooth the stochastic process. With the innovations, we can estimate the parameters of the model. The article discusses how to set a dynamic model in a state-space form, derives the Kalman and Particle filters, and explains how to use them for estimation. Kalman and Particle Filtering The Kalman and Particle filters are algorithms that recursively update an estimate of the state and find the innovations driving a stochastic process given a sequence of observations. The Kalman filter accomplishes this goal by linear projections, while the Particle filter does so by a sequential Monte Carlo method. Since both filters start with a state-space representation of the stochastic processes of interest, section 1 presents the state-space form of a dynamic model. Then, section 2 intro- duces the Kalman filter and section 3 develops the Particle filter. For extended expositions of this material, see Doucet, de Freitas, and Gordon (2001), Durbin and Koopman (2001), and Ljungqvist and Sargent (2004). 1. The state-space representation of a dynamic model A large class of dynamic models can be represented by a state-space form: Xt+1 = ϕ (Xt,Wt+1; γ) (1) Yt = g (Xt,Vt; γ) . (2) This representation handles a stochastic process by finding three objects: a vector that l describes the position of the system (a state, Xt X R ) and two functions, one mapping ∈ ⊂ 1 the state today into the state tomorrow (the transition equation, (1)) and one mapping the state into observables, Yt (the measurement equation, (2)). -

Lecture 15: Approximate Inference: Monte Carlo Methods
10-708: Probabilistic Graphical Models 10-708, Spring 2017 Lecture 15: Approximate Inference: Monte Carlo methods Lecturer: Eric P. Xing Name: Yuan Liu(yuanl4), Yikang Li(yikangl) 1 Introduction We have already learned some exact inference methods in the previous lectures, such as the elimination algo- rithm, message-passing algorithm and the junction tree algorithms. However, there are many probabilistic models of practical interest for which exact inference is intractable. One important class of inference algo- rithms is based on deterministic approximation schemes and includes methods such as variational methods. This lecture will include an alternative very general and widely used framework for approximate inference based on stochastic simulation through sampling, also known as the Monte Carlo methods. The purpose of the Monte Carlo method is to find the expectation of some function f(x) with respect to a probability distribution p(x). Here, the components of x might comprise of discrete or continuous variables, or some combination of the two. Z hfi = f(x)p(x)dx The general idea behind sampling methods is to obtain a set of examples x(t)(where t = 1; :::; N) drawn from the distribution p(x). This allows the expectation (1) to be approximated by a finite sum N 1 X f^ = f(x(t)) N t=1 If the samples x(t) is i.i.d, it is clear that hf^i = hfi, and the variance of the estimator is h(f − hfi)2i=N. Monte Carlo methods work by drawing samples from the desired distribution, which can be accomplished even when it it not possible to write out the pdf. -

A Fourier-Wavelet Monte Carlo Method for Fractal Random Fields
JOURNAL OF COMPUTATIONAL PHYSICS 132, 384±408 (1997) ARTICLE NO. CP965647 A Fourier±Wavelet Monte Carlo Method for Fractal Random Fields Frank W. Elliott Jr., David J. Horntrop, and Andrew J. Majda Courant Institute of Mathematical Sciences, 251 Mercer Street, New York, New York 10012 Received August 2, 1996; revised December 23, 1996 2 2H k[v(x) 2 v(y)] l 5 CHux 2 yu , (1.1) A new hierarchical method for the Monte Carlo simulation of random ®elds called the Fourier±wavelet method is developed and where 0 , H , 1 is the Hurst exponent and k?l denotes applied to isotropic Gaussian random ®elds with power law spectral the expected value. density functions. This technique is based upon the orthogonal Here we develop a new Monte Carlo method based upon decomposition of the Fourier stochastic integral representation of the ®eld using wavelets. The Meyer wavelet is used here because a wavelet expansion of the Fourier space representation of its rapid decay properties allow for a very compact representation the fractal random ®elds in (1.1). This method is capable of the ®eld. The Fourier±wavelet method is shown to be straightfor- of generating a velocity ®eld with the Kolmogoroff spec- ward to implement, given the nature of the necessary precomputa- trum (H 5 Ad in (1.1)) over many (10 to 15) decades of tions and the run-time calculations, and yields comparable results scaling behavior comparable to the physical space multi- with scaling behavior over as many decades as the physical space multiwavelet methods developed recently by two of the authors. -

Estimating Standard Errors for Importance Sampling Estimators with Multiple Markov Chains
Estimating standard errors for importance sampling estimators with multiple Markov chains Vivekananda Roy1, Aixin Tan2, and James M. Flegal3 1Department of Statistics, Iowa State University 2Department of Statistics and Actuarial Science, University of Iowa 3Department of Statistics, University of California, Riverside Aug 10, 2016 Abstract The naive importance sampling estimator, based on samples from a single importance density, can be numerically unstable. Instead, we consider generalized importance sampling estimators where samples from more than one probability distribution are combined. We study this problem in the Markov chain Monte Carlo context, where independent samples are replaced with Markov chain samples. If the chains converge to their respective target distributions at a polynomial rate, then under two finite moment conditions, we show a central limit theorem holds for the generalized estimators. Further, we develop an easy to implement method to calculate valid asymptotic standard errors based on batch means. We also provide a batch means estimator for calculating asymptotically valid standard errors of Geyer’s (1994) reverse logistic estimator. We illustrate the method via three examples. In particular, the generalized importance sampling estimator is used for Bayesian spatial modeling of binary data and to perform empirical Bayes variable selection where the batch means estimator enables standard error calculations in high-dimensional settings. arXiv:1509.06310v2 [math.ST] 11 Aug 2016 Key words and phrases: Bayes factors, Markov chain Monte Carlo, polynomial ergodicity, ratios of normalizing constants, reverse logistic estimator. 1 Introduction Let π(x) = ν(x)=m be a probability density function (pdf) on X with respect to a measure µ(·). R Suppose f : X ! R is a π integrable function and we want to estimate Eπf := X f(x)π(x)µ(dx). -

Distilling Importance Sampling
Distilling Importance Sampling Dennis Prangle1 1School of Mathematics, University of Bristol, United Kingdom Abstract in almost any setting, including in the presence of strong posterior dependence or discrete random variables. How- ever it only achieves a representative weighted sample at a Many complicated Bayesian posteriors are difficult feasible cost if the proposal is a reasonable approximation to approximate by either sampling or optimisation to the target distribution. methods. Therefore we propose a novel approach combining features of both. We use a flexible para- An alternative to Monte Carlo is to use optimisation to meterised family of densities, such as a normal- find the best approximation to the posterior from a family of ising flow. Given a density from this family approx- distributions. Typically this is done in the framework of vari- imating the posterior, we use importance sampling ational inference (VI). VI is computationally efficient but to produce a weighted sample from a more accur- has the drawback that it often produces poor approximations ate posterior approximation. This sample is then to the posterior distribution e.g. through over-concentration used in optimisation to update the parameters of [Turner et al., 2008, Yao et al., 2018]. the approximate density, which we view as dis- A recent improvement in VI is due to the development of tilling the importance sampling results. We iterate a range of flexible and computationally tractable distribu- these steps and gradually improve the quality of the tional families using normalising flows [Dinh et al., 2016, posterior approximation. We illustrate our method Papamakarios et al., 2019a]. These transform a simple base in two challenging examples: a queueing model random distribution to a complex distribution, using a se- and a stochastic differential equation model. -
Importance Sampling & Sequential Importance Sampling
Importance Sampling & Sequential Importance Sampling Arnaud Doucet Departments of Statistics & Computer Science University of British Columbia A.D. () 1 / 40 Each distribution πn (dx1:n) = πn (x1:n) dx1:n is known up to a normalizing constant, i.e. γn (x1:n) πn (x1:n) = Zn We want to estimate expectations of test functions ϕ : En R n ! Eπn (ϕn) = ϕn (x1:n) πn (dx1:n) Z and/or the normalizing constants Zn. We want to do this sequentially; i.e. …rst π1 and/or Z1 at time 1 then π2 and/or Z2 at time 2 and so on. Generic Problem Consider a sequence of probability distributions πn n 1 de…ned on a f g sequence of (measurable) spaces (En, n) n 1 where E1 = E, f F g 1 = and En = En 1 E, n = n 1 . F F F F F A.D. () 2 / 40 We want to estimate expectations of test functions ϕ : En R n ! Eπn (ϕn) = ϕn (x1:n) πn (dx1:n) Z and/or the normalizing constants Zn. We want to do this sequentially; i.e. …rst π1 and/or Z1 at time 1 then π2 and/or Z2 at time 2 and so on. Generic Problem Consider a sequence of probability distributions πn n 1 de…ned on a f g sequence of (measurable) spaces (En, n) n 1 where E1 = E, f F g 1 = and En = En 1 E, n = n 1 . F F F F F Each distribution πn (dx1:n) = πn (x1:n) dx1:n is known up to a normalizing constant, i.e. -

Fourier, Wavelet and Monte Carlo Methods in Computational Finance
Fourier, Wavelet and Monte Carlo Methods in Computational Finance Kees Oosterlee1;2 1CWI, Amsterdam 2Delft University of Technology, the Netherlands AANMPDE-9-16, 7/7/2016 Kees Oosterlee (CWI, TU Delft) Comp. Finance AANMPDE-9-16 1 / 51 Joint work with Fang Fang, Marjon Ruijter, Luis Ortiz, Shashi Jain, Alvaro Leitao, Fei Cong, Qian Feng Agenda Derivatives pricing, Feynman-Kac Theorem Fourier methods Basics of COS method; Basics of SWIFT method; Options with early-exercise features COS method for Bermudan options Monte Carlo method BSDEs, BCOS method (very briefly) Kees Oosterlee (CWI, TU Delft) Comp. Finance AANMPDE-9-16 1 / 51 Agenda Derivatives pricing, Feynman-Kac Theorem Fourier methods Basics of COS method; Basics of SWIFT method; Options with early-exercise features COS method for Bermudan options Monte Carlo method BSDEs, BCOS method (very briefly) Joint work with Fang Fang, Marjon Ruijter, Luis Ortiz, Shashi Jain, Alvaro Leitao, Fei Cong, Qian Feng Kees Oosterlee (CWI, TU Delft) Comp. Finance AANMPDE-9-16 1 / 51 Feynman-Kac theorem: Z T v(t; x) = E g(s; Xs )ds + h(XT ) ; t where Xs is the solution to the FSDE dXs = µ(Xs )ds + σ(Xs )d!s ; Xt = x: Feynman-Kac Theorem The linear partial differential equation: @v(t; x) + Lv(t; x) + g(t; x) = 0; v(T ; x) = h(x); @t with operator 1 Lv(t; x) = µ(x)Dv(t; x) + σ2(x)D2v(t; x): 2 Kees Oosterlee (CWI, TU Delft) Comp. Finance AANMPDE-9-16 2 / 51 Feynman-Kac Theorem The linear partial differential equation: @v(t; x) + Lv(t; x) + g(t; x) = 0; v(T ; x) = h(x); @t with operator 1 Lv(t; x) = µ(x)Dv(t; x) + σ2(x)D2v(t; x): 2 Feynman-Kac theorem: Z T v(t; x) = E g(s; Xs )ds + h(XT ) ; t where Xs is the solution to the FSDE dXs = µ(Xs )ds + σ(Xs )d!s ; Xt = x: Kees Oosterlee (CWI, TU Delft) Comp. -

Efficient Monte Carlo Methods for Estimating Failure Probabilities
Reliability Engineering and System Safety 165 (2017) 376–394 Contents lists available at ScienceDirect Reliability Engineering and System Safety journal homepage: www.elsevier.com/locate/ress ffi E cient Monte Carlo methods for estimating failure probabilities MARK ⁎ Andres Albana, Hardik A. Darjia,b, Atsuki Imamurac, Marvin K. Nakayamac, a Mathematical Sciences Dept., New Jersey Institute of Technology, Newark, NJ 07102, USA b Mechanical Engineering Dept., New Jersey Institute of Technology, Newark, NJ 07102, USA c Computer Science Dept., New Jersey Institute of Technology, Newark, NJ 07102, USA ARTICLE INFO ABSTRACT Keywords: We develop efficient Monte Carlo methods for estimating the failure probability of a system. An example of the Probabilistic safety assessment problem comes from an approach for probabilistic safety assessment of nuclear power plants known as risk- Risk analysis informed safety-margin characterization, but it also arises in other contexts, e.g., structural reliability, Structural reliability catastrophe modeling, and finance. We estimate the failure probability using different combinations of Uncertainty simulation methodologies, including stratified sampling (SS), (replicated) Latin hypercube sampling (LHS), Monte Carlo and conditional Monte Carlo (CMC). We prove theorems establishing that the combination SS+LHS (resp., SS Variance reduction Confidence intervals +CMC+LHS) has smaller asymptotic variance than SS (resp., SS+LHS). We also devise asymptotically valid (as Nuclear regulation the overall sample size grows large) upper confidence bounds for the failure probability for the methods Risk-informed safety-margin characterization considered. The confidence bounds may be employed to perform an asymptotically valid probabilistic safety assessment. We present numerical results demonstrating that the combination SS+CMC+LHS can result in substantial variance reductions compared to stratified sampling alone. -

Basic Statistics and Monte-Carlo Method -2
Applied Statistical Mechanics Lecture Note - 10 Basic Statistics and Monte-Carlo Method -2 고려대학교 화공생명공학과 강정원 Table of Contents 1. General Monte Carlo Method 2. Variance Reduction Techniques 3. Metropolis Monte Carlo Simulation 1.1 Introduction Monte Carlo Method Any method that uses random numbers Random sampling the population Application • Science and engineering • Management and finance For given subject, various techniques and error analysis will be presented Subject : evaluation of definite integral b I = ρ(x)dx a 1.1 Introduction Monte Carlo method can be used to compute integral of any dimension d (d-fold integrals) Error comparison of d-fold integrals Simpson’s rule,… E ∝ N −1/ d − Monte Carlo method E ∝ N 1/ 2 purely statistical, not rely on the dimension ! Monte Carlo method WINS, when d >> 3 1.2 Hit-or-Miss Method Evaluation of a definite integral b I = ρ(x)dx a h X X X ≥ ρ X h (x) for any x X Probability that a random point reside inside X O the area O O I N' O O r = ≈ O O (b − a)h N a b N : Total number of points N’ : points that reside inside the region N' I ≈ (b − a)h N 1.2 Hit-or-Miss Method Start Set N : large integer N’ = 0 h X X X X X Choose a point x in [a,b] = − + X Loop x (b a)u1 a O N times O O y = hu O O Choose a point y in [0,h] 2 O O a b if [x,y] reside inside then N’ = N’+1 I = (b-a) h (N’/N) End 1.2 Hit-or-Miss Method Error Analysis of the Hit-or-Miss Method It is important to know how accurate the result of simulations are The rule of 3σ’s Identifying Random Variable N = 1 X X n N n=1 From -

Monte Carlo Method - Wikipedia
2. 11. 2019 Monte Carlo method - Wikipedia Monte Carlo method Monte Carlo methods, or Monte Carlo experiments, are a broad class of computational algorithms that rely on repeated random sampling to obtain numerical results. The underlying concept is to use randomness to solve problems that might be deterministic in principle. They are often used in physical and mathematical problems and are most useful when it is difficult or impossible to use other approaches. Monte Carlo methods are mainly used in three problem classes:[1] optimization, numerical integration, and generating draws from a probability distribution. In physics-related problems, Monte Carlo methods are useful for simulating systems with many coupled degrees of freedom, such as fluids, disordered materials, strongly coupled solids, and cellular structures (see cellular Potts model, interacting particle systems, McKean–Vlasov processes, kinetic models of gases). Other examples include modeling phenomena with significant uncertainty in inputs such as the calculation of risk in business and, in mathematics, evaluation of multidimensional definite integrals with complicated boundary conditions. In application to systems engineering problems (space, oil exploration, aircraft design, etc.), Monte Carlo–based predictions of failure, cost overruns and schedule overruns are routinely better than human intuition or alternative "soft" methods.[2] In principle, Monte Carlo methods can be used to solve any problem having a probabilistic interpretation. By the law of large numbers, integrals described by the expected value of some random variable can be approximated by taking the empirical mean (a.k.a. the sample mean) of independent samples of the variable. When the probability distribution of the variable is parametrized, mathematicians often use a Markov chain Monte Carlo (MCMC) sampler.[3][4][5][6] The central idea is to design a judicious Markov chain model with a prescribed stationary probability distribution. -
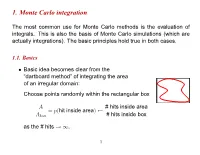
1. Monte Carlo Integration
1. Monte Carlo integration The most common use for Monte Carlo methods is the evaluation of integrals. This is also the basis of Monte Carlo simulations (which are actually integrations). The basic principles hold true in both cases. 1.1. Basics Basic idea becomes clear from the • “dartboard method” of integrating the area of an irregular domain: Choose points randomly within the rectangular box A # hits inside area = p(hit inside area) Abox # hits inside box as the # hits . ! 1 1 Buffon’s (1707–1788) needle experiment to determine π: • – Throw needles, length l, on a grid of lines l distance d apart. – Probability that a needle falls on a line: d 2l P = πd – Aside: Lazzarini 1901: Buffon’s experiment with 34080 throws: 355 π = 3:14159292 ≈ 113 Way too good result! (See “π through the ages”, http://www-groups.dcs.st-and.ac.uk/ history/HistTopics/Pi through the ages.html) ∼ 2 1.2. Standard Monte Carlo integration Let us consider an integral in d dimensions: • I = ddxf(x) ZV Let V be a d-dim hypercube, with 0 x 1 (for simplicity). ≤ µ ≤ Monte Carlo integration: • - Generate N random vectors x from flat distribution (0 (x ) 1). i ≤ i µ ≤ - As N , ! 1 V N f(xi) I : N iX=1 ! - Error: 1=pN independent of d! (Central limit) / “Normal” numerical integration methods (Numerical Recipes): • - Divide each axis in n evenly spaced intervals 3 - Total # of points N nd ≡ - Error: 1=n (Midpoint rule) / 1=n2 (Trapezoidal rule) / 1=n4 (Simpson) / If d is small, Monte Carlo integration has much larger errors than • standard methods. -

Blackimportance Sampling and Its Optimality for Stochastic
Electronic Journal of Statistics ISSN: 1935-7524 Importance Sampling and its Optimality for Stochastic Simulation Models Yen-Chi Chen and Youngjun Choe University of Washington, Department of Statistics Seattle, WA 98195 e-mail: [email protected]∗ University of Washington, Department of Industrial and Systems Engineering Seattle, WA 98195 e-mail: [email protected]∗ Abstract: We consider the problem of estimating an expected outcome from a stochastic simulation model. Our goal is to develop a theoretical framework on importance sampling for such estimation. By investigating the variance of an importance sampling estimator, we propose a two-stage procedure that involves a regression stage and a sampling stage to construct the final estimator. We introduce a parametric and a nonparametric regres- sion estimator in the first stage and study how the allocation between the two stages affects the performance of the final estimator. We analyze the variance reduction rates and derive oracle properties of both methods. We evaluate the empirical performances of the methods using two numerical examples and a case study on wind turbine reliability evaluation. MSC 2010 subject classifications: Primary 62G20; secondary 62G86, 62H30. Keywords and phrases: nonparametric estimation, stochastic simulation model, oracle property, variance reduction, Monte Carlo. 1. Introduction The 2011 Fisher lecture (Wu, 2015) features the landscape change in engineer- ing, where computer simulation experiments are replacing physical experiments thanks to the advance of modeling and computing technologies. An insight from the lecture highlights that traditional principles for physical experiments do not necessarily apply to virtual experiments on a computer. The virtual environ- ment calls for new modeling and analysis frameworks distinguished from those arXiv:1710.00473v2 [stat.ME] 25 Sep 2019 developed under the constraint of physical environment.