Spherical Geometry MATH430 Fall 2014
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Proofs with Perpendicular Lines
3.4 Proofs with Perpendicular Lines EEssentialssential QQuestionuestion What conjectures can you make about perpendicular lines? Writing Conjectures Work with a partner. Fold a piece of paper D in half twice. Label points on the two creases, as shown. a. Write a conjecture about AB— and CD — . Justify your conjecture. b. Write a conjecture about AO— and OB — . AOB Justify your conjecture. C Exploring a Segment Bisector Work with a partner. Fold and crease a piece A of paper, as shown. Label the ends of the crease as A and B. a. Fold the paper again so that point A coincides with point B. Crease the paper on that fold. b. Unfold the paper and examine the four angles formed by the two creases. What can you conclude about the four angles? B Writing a Conjecture CONSTRUCTING Work with a partner. VIABLE a. Draw AB — , as shown. A ARGUMENTS b. Draw an arc with center A on each To be prof cient in math, side of AB — . Using the same compass you need to make setting, draw an arc with center B conjectures and build a on each side of AB— . Label the C O D logical progression of intersections of the arcs C and D. statements to explore the c. Draw CD — . Label its intersection truth of your conjectures. — with AB as O. Write a conjecture B about the resulting diagram. Justify your conjecture. CCommunicateommunicate YourYour AnswerAnswer 4. What conjectures can you make about perpendicular lines? 5. In Exploration 3, f nd AO and OB when AB = 4 units. -

Using Non-Euclidean Geometry to Teach Euclidean Geometry to K–12 Teachers
Using non-Euclidean Geometry to teach Euclidean Geometry to K–12 teachers David Damcke Department of Mathematics, University of Portland, Portland, OR 97203 [email protected] Tevian Dray Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] Maria Fung Mathematics Department, Western Oregon University, Monmouth, OR 97361 [email protected] Dianne Hart Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] Lyn Riverstone Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] January 22, 2008 Abstract The Oregon Mathematics Leadership Institute (OMLI) is an NSF-funded partner- ship aimed at increasing mathematics achievement of students in partner K–12 schools through the creation of sustainable leadership capacity. OMLI’s 3-week summer in- stitute offers content and leadership courses for in-service teachers. We report here on one of the content courses, entitled Comparing Different Geometries, which en- hances teachers’ understanding of the (Euclidean) geometry in the K–12 curriculum by studying two non-Euclidean geometries: taxicab geometry and spherical geometry. By confronting teachers from mixed grade levels with unfamiliar material, while mod- eling protocol-based pedagogy intended to emphasize a cooperative, risk-free learning environment, teachers gain both content knowledge and insight into the teaching of mathematical thinking. Keywords: Cooperative groups, Euclidean geometry, K–12 teachers, Norms and protocols, Rich mathematical tasks, Spherical geometry, Taxicab geometry 1 1 Introduction The Oregon Mathematics Leadership Institute (OMLI) is a Mathematics/Science Partner- ship aimed at increasing mathematics achievement of K–12 students by providing professional development opportunities for in-service teachers. -

And Are Lines on Sphere B That Contain Point Q
11-5 Spherical Geometry Name each of the following on sphere B. 3. a triangle SOLUTION: are examples of triangles on sphere B. 1. two lines containing point Q SOLUTION: and are lines on sphere B that contain point Q. ANSWER: 4. two segments on the same great circle SOLUTION: are segments on the same great circle. ANSWER: and 2. a segment containing point L SOLUTION: is a segment on sphere B that contains point L. ANSWER: SPORTS Determine whether figure X on each of the spheres shown is a line in spherical geometry. 5. Refer to the image on Page 829. SOLUTION: Notice that figure X does not go through the pole of ANSWER: the sphere. Therefore, figure X is not a great circle and so not a line in spherical geometry. ANSWER: no eSolutions Manual - Powered by Cognero Page 1 11-5 Spherical Geometry 6. Refer to the image on Page 829. 8. Perpendicular lines intersect at one point. SOLUTION: SOLUTION: Notice that the figure X passes through the center of Perpendicular great circles intersect at two points. the ball and is a great circle, so it is a line in spherical geometry. ANSWER: yes ANSWER: PERSEVERANC Determine whether the Perpendicular great circles intersect at two points. following postulate or property of plane Euclidean geometry has a corresponding Name two lines containing point M, a segment statement in spherical geometry. If so, write the containing point S, and a triangle in each of the corresponding statement. If not, explain your following spheres. reasoning. 7. The points on any line or line segment can be put into one-to-one correspondence with real numbers. -

Geometry: Euclid and Beyond, by Robin Hartshorne, Springer-Verlag, New York, 2000, Xi+526 Pp., $49.95, ISBN 0-387-98650-2
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 39, Number 4, Pages 563{571 S 0273-0979(02)00949-7 Article electronically published on July 9, 2002 Geometry: Euclid and beyond, by Robin Hartshorne, Springer-Verlag, New York, 2000, xi+526 pp., $49.95, ISBN 0-387-98650-2 1. Introduction The first geometers were men and women who reflected on their experiences while doing such activities as building small shelters and bridges, making pots, weaving cloth, building altars, designing decorations, or gazing into the heavens for portentous signs or navigational aides. Main aspects of geometry emerged from three strands of early human activity that seem to have occurred in most cultures: art/patterns, navigation/stargazing, and building structures. These strands developed more or less independently into varying studies and practices that eventually were woven into what we now call geometry. Art/Patterns: To produce decorations for their weaving, pottery, and other objects, early artists experimented with symmetries and repeating patterns. Later the study of symmetries of patterns led to tilings, group theory, crystallography, finite geometries, and in modern times to security codes and digital picture com- pactifications. Early artists also explored various methods of representing existing objects and living things. These explorations led to the study of perspective and then projective geometry and descriptive geometry, and (in the 20th century) to computer-aided graphics, the study of computer vision in robotics, and computer- generated movies (for example, Toy Story ). Navigation/Stargazing: For astrological, religious, agricultural, and other purposes, ancient humans attempted to understand the movement of heavenly bod- ies (stars, planets, Sun, and Moon) in the apparently hemispherical sky. -

Project 2: Euclidean & Spherical Geometry Applied to Course Topics
Project 2: Euclidean & Spherical Geometry Applied to Course Topics You may work alone or with one other person. During class you will write down your top problems (unranked) and from this you will be assigned one problem. In this project, we will use intuition from previous Euclidean geometry knowledge along with experiences from hands-on models and/or research. The purpose of this assignment is an introduction to the concepts in the course syllabus as we explore diverse geometric perspectives. Project Components: a) Review content related to your problem that applies to the geometry of the plane / Euclidean geometry / flat geometry. For example, if you have Problem 1 then you might review the definitions of lines and how to calculate them, for Problem 9 you might review some information related to area and surface area, for Problem 10 you might review coordinate systems... You may use our book, the internet, or other sources. b) Why the topic is important in mathematics and the real-world? Conduct searches like \trian- gles are important" or a search word related to your problem and then (with and without quotations) words like important, interesting, useful, or real-life applications. You might also pick some specific fields to see if there are applications such as: Pythagorean theorem chemistry c) Summarize diverse spherical perspectives. You do not need to prove an answer or completely resolve the issue on the sphere. You should look for various perspectives related to spherical geometry, and summarize those in your own words. Try different combinations of search terms related to your problem along with words like sphere, spherical, earth, or spherical geometry. -

Spherical Geometry
987023 2473 < % 52873 52 59 3 1273 ¼4 14 578 2 49873 3 4 7∆��≌ ≠ 3 δ � 2 1 2 7 5 8 4 3 23 5 1 ⅓β ⅝Υ � VCAA-AMSI maths modules 5 1 85 34 5 45 83 8 8 3 12 5 = 2 38 95 123 7 3 7 8 x 3 309 �Υβ⅓⅝ 2 8 13 2 3 3 4 1 8 2 0 9 756 73 < 1 348 2 5 1 0 7 4 9 9 38 5 8 7 1 5 812 2 8 8 ХФУШ 7 δ 4 x ≠ 9 3 ЩЫ � Ѕ � Ђ 4 � ≌ = ⅙ Ё ∆ ⊚ ϟϝ 7 0 Ϛ ό ¼ 2 ύҖ 3 3 Ҧδ 2 4 Ѽ 3 5 ᴂԅ 3 3 Ӡ ⍰1 ⋓ ӓ 2 7 ӕ 7 ⟼ ⍬ 9 3 8 Ӂ 0 ⤍ 8 9 Ҷ 5 2 ⋟ ҵ 4 8 ⤮ 9 ӛ 5 ₴ 9 4 5 € 4 ₦ € 9 7 3 ⅘ 3 ⅔ 8 2 2 0 3 1 ℨ 3 ℶ 3 0 ℜ 9 2 ⅈ 9 ↄ 7 ⅞ 7 8 5 2 ∭ 8 1 8 2 4 5 6 3 3 9 8 3 8 1 3 2 4 1 85 5 4 3 Ӡ 7 5 ԅ 5 1 ᴂ - 4 �Υβ⅓⅝ 0 Ѽ 8 3 7 Ҧ 6 2 3 Җ 3 ύ 4 4 0 Ω 2 = - Å 8 € ℭ 6 9 x ℗ 0 2 1 7 ℋ 8 ℤ 0 ∬ - √ 1 ∜ ∱ 5 ≄ 7 A guide for teachers – Years 11 and 12 ∾ 3 ⋞ 4 ⋃ 8 6 ⑦ 9 ∭ ⋟ 5 ⤍ ⅞ Geometry ↄ ⟼ ⅈ ⤮ ℜ ℶ ⍬ ₦ ⍰ ℨ Spherical Geometry ₴ € ⋓ ⊚ ⅙ ӛ ⋟ ⑦ ⋃ Ϛ ό ⋞ 5 ∾ 8 ≄ ∱ 3 ∜ 8 7 √ 3 6 ∬ ℤ ҵ 4 Ҷ Ӂ ύ ӕ Җ ӓ Ӡ Ҧ ԅ Ѽ ᴂ 8 7 5 6 Years DRAFT 11&12 DRAFT Spherical Geometry – A guide for teachers (Years 11–12) Andrew Stewart, Presbyterian Ladies’ College, Melbourne Illustrations and web design: Catherine Tan © VCAA and The University of Melbourne on behalf of AMSI 2015. -

Of Rigid Motions) to Make the Simplest Possible Analogies Between Euclidean, Spherical,Toroidal and Hyperbolic Geometry
SPHERICAL, TOROIDAL AND HYPERBOLIC GEOMETRIES MICHAEL D. FRIED, 231 MSTB These notes use groups (of rigid motions) to make the simplest possible analogies between Euclidean, Spherical,Toroidal and hyperbolic geometry. We start with 3- space figures that relate to the unit sphere. With spherical geometry, as we did with Euclidean geometry, we use a group that preserves distances. The approach of these notes uses the geometry of groups to show the relation between various geometries, especially spherical and hyperbolic. It has been in the background of mathematics since Klein’s Erlangen program in the late 1800s. I imagine Poincar´e responded to Klein by producing hyperbolic geometry in the style I’ve done here. Though the group approach of these notes differs philosophically from that of [?], it owes much to his discussion of spherical geometry. I borrowed the picture of a spherical triangle’s area directly from there. I especially liked how Henle has stereographic projection allow the magic multiplication of complex numbers to work for him. While one doesn’t need the rotation group in 3-space to understand spherical geometry, I used it gives a direct analogy between spherical and hyperbolic geometry. It is the comparison of the four types of geometry that is ultimately most inter- esting. A problem from my Problem Sheet has the name World Wallpaper. Map making is a subject that has attracted many. In our day of Landsat photos that cover the whole world in its great spherical presence, the still mysterious relation between maps and the real thing should be an easy subject for the classroom. -
![Arxiv:1409.4736V1 [Math.HO] 16 Sep 2014](https://docslib.b-cdn.net/cover/7151/arxiv-1409-4736v1-math-ho-16-sep-2014-2067151.webp)
Arxiv:1409.4736V1 [Math.HO] 16 Sep 2014
ON THE WORKS OF EULER AND HIS FOLLOWERS ON SPHERICAL GEOMETRY ATHANASE PAPADOPOULOS Abstract. We review and comment on some works of Euler and his followers on spherical geometry. We start by presenting some memoirs of Euler on spherical trigonometry. We comment on Euler's use of the methods of the calculus of variations in spherical trigonometry. We then survey a series of geometrical resuls, where the stress is on the analogy between the results in spherical geometry and the corresponding results in Euclidean geometry. We elaborate on two such results. The first one, known as Lexell's Theorem (Lexell was a student of Euler), concerns the locus of the vertices of a spherical triangle with a fixed area and a given base. This is the spherical counterpart of a result in Euclid's Elements, but it is much more difficult to prove than its Euclidean analogue. The second result, due to Euler, is the spherical analogue of a generalization of a theorem of Pappus (Proposition 117 of Book VII of the Collection) on the construction of a triangle inscribed in a circle whose sides are contained in three lines that pass through three given points. Both results have many ramifications, involving several mathematicians, and we mention some of these developments. We also comment on three papers of Euler on projections of the sphere on the Euclidean plane that are related with the art of drawing geographical maps. AMS classification: 01-99 ; 53-02 ; 53-03 ; 53A05 ; 53A35. Keywords: spherical trigonometry, spherical geometry, Euler, Lexell the- orem, cartography, calculus of variations. -
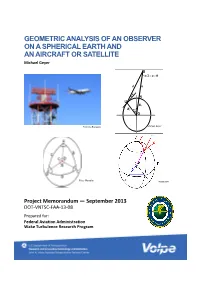
GEOMETRIC ANALYSIS of an OBSERVER on a SPHERICAL EARTH and an AIRCRAFT OR SATELLITE Michael Geyer
GEOMETRIC ANALYSIS OF AN OBSERVER ON A SPHERICAL EARTH AND AN AIRCRAFT OR SATELLITE Michael Geyer S π/2 - α - θ d h α N U Re Re θ O Federico Rostagno Michael Geyer Peter Mercator nosco.com Project Memorandum — September 2013 DOT-VNTSC-FAA-13-08 Prepared for: Federal Aviation Administration Wake Turbulence Research Program DOT/RITA Volpe Center TABLE OF CONTENTS 1. INTRODUCTION...................................................................................................... 1 1.1 Basic Problem and Solution Approach........................................................................................1 1.2 Vertical Plane Formulation ..........................................................................................................2 1.3 Spherical Surface Formulation ....................................................................................................3 1.4 Limitations and Applicability of Analysis...................................................................................4 1.5 Recommended Approach to Finding a Solution.........................................................................5 1.6 Outline of this Document ..............................................................................................................6 2. MATHEMATICS AND PHYSICS BASICS ............................................................... 8 2.1 Exact and Approximate Solutions to Common Equations ........................................................8 2.1.1 The Law of Sines for Plane Triangles.........................................................................................8 -

1 Lecture 6 SPHERICAL GEOMETRY So Far We Have Studied Finite And
1 Lecture 6 SPHERICAL GEOMETRY So far we have studied finite and discrete geometries, i.e., geometries in which the main transformation group is either finite or discrete. In this lec- ture, we begin our study of infinite continuous geometries with spherical ge- ometry, the geometry (S2:O(3)) of the isometry group of the two-dimensional sphere, which is in fact the subgroup of all isometries of R3 that map the origin to itself; O(3) is called the orthogonal group in linear algebra courses. But first we list the classical continuous geometries that will be studied in this course. Some of them may be familiar to the reader, others will be new. 6.1. A list of classical continuous geometries Here we merely list, for future reference, several very classical geometries whose transformation groups are “continuous” rather than finite or discrete. We will not make the intuitively clear notion of continuous transformation group precise (this would involve defining the so-called topological groups or even Lie groups), because we will not study this notion in the general case: it is not needed in this introductory course. The material of this section is not used in the rest of the present chapter, so the reader who wants to learn about spherical geometry without delay can immediately go on to Sect. 6.3. 6.1.1. Finite-dimensional vector spaces over the field of real numbers are actually geometries in the sense of Klein (the main definition of Chapter 1). From that point of view, they can be written as n (V : GL(n)) , where Vn denotes the n-dimensional vector space over R and (GL(n) is the general linear group, i.e., the group of all nondegenerate linear transforma- tions of Vn to itself. -

MA 341 Fall 2011
MA 341 Fall 2011 The Origins of Geometry 1.1: Introduction In the beginning geometry was a collection of rules for computing lengths, areas, and volumes. Many were crude approximations derived by trial and error. This body of knowledge, developed and used in construction, navigation, and surveying by the Babylonians and Egyptians, was passed to the Greeks. The Greek historian Herodotus (5th century BC) credits the Egyptians with having originated the subject, but there is much evidence that the Babylonians, the Hindu civilization, and the Chinese knew much of what was passed along to the Egyptians. The Babylonians of 2,000 to 1,600 BC knew much about navigation and astronomy, which required knowledge of geometry. Clay tablets from the Sumerian (2100 BC) and the Babylonian cultures (1600 BC) include tables for computing products, reciprocals, squares, square roots, and other mathematical functions useful in financial calculations. Babylonians were able to compute areas of rectangles, right and isosceles triangles, trapezoids and circles. They computed the area of a circle as the square of the circumference divided by twelve. The Babylonians were also responsible for dividing the circumference of a circle into 360 equal parts. They also used the Pythagorean Theorem (long before Pythagoras), performed calculations involving ratio and proportion, and studied the relationships between the elements of various triangles. See Appendices A and B for more about the mathematics of the Babylonians. 1.2: A History of the Value of π The Babylonians also considered the circumference of the circle to be three times the diameter. Of course, this would make 3 — a small problem. -
A Survey of Projective Geometric Structures on 2-,3-Manifolds
A survey of projective geometric structures on 2-,3-manifolds S. Choi A survey of projective geometric Outline Classical geometries structures on 2-,3-manifolds Euclidean geometry Spherical geometry Manifolds with geometric S. Choi structures: manifolds need some canonical descriptions.. Department of Mathematical Science Manifolds with KAIST, Daejeon, South Korea (real) projective structures Tokyo Institute of Technology A survey of Outline projective geometric structures on 2-,3-manifolds S. Choi I Survey: Classical geometries Outline I Euclidean geometry: Babylonians, Egyptians, Classical geometries Greeks, Chinese (Euclid’s axiomatic methods under Euclidean geometry Plato’s philosphy) Spherical geometry Manifolds with I Spherical geometry: Greek astronomy, Gauss, geometric Riemann structures: manifolds need I Hyperbolic geometry: Bolyai, Lobachevsky, Gauss, some canonical Beltrami,Klein, Poincare descriptions.. Manifolds with I Conformal geometry (Mobius geometry or circle (real) projective geometry) structures I Projective geometry I Erlanger program, Cartan connections, Ehresmann connections A survey of Outline projective geometric structures on 2-,3-manifolds S. Choi I Survey: Classical geometries Outline I Euclidean geometry: Babylonians, Egyptians, Classical geometries Greeks, Chinese (Euclid’s axiomatic methods under Euclidean geometry Plato’s philosphy) Spherical geometry Manifolds with I Spherical geometry: Greek astronomy, Gauss, geometric Riemann structures: manifolds need I Hyperbolic geometry: Bolyai, Lobachevsky, Gauss,