GEOMETRIC ANALYSIS of an OBSERVER on a SPHERICAL EARTH and an AIRCRAFT OR SATELLITE Michael Geyer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Proofs with Perpendicular Lines
3.4 Proofs with Perpendicular Lines EEssentialssential QQuestionuestion What conjectures can you make about perpendicular lines? Writing Conjectures Work with a partner. Fold a piece of paper D in half twice. Label points on the two creases, as shown. a. Write a conjecture about AB— and CD — . Justify your conjecture. b. Write a conjecture about AO— and OB — . AOB Justify your conjecture. C Exploring a Segment Bisector Work with a partner. Fold and crease a piece A of paper, as shown. Label the ends of the crease as A and B. a. Fold the paper again so that point A coincides with point B. Crease the paper on that fold. b. Unfold the paper and examine the four angles formed by the two creases. What can you conclude about the four angles? B Writing a Conjecture CONSTRUCTING Work with a partner. VIABLE a. Draw AB — , as shown. A ARGUMENTS b. Draw an arc with center A on each To be prof cient in math, side of AB — . Using the same compass you need to make setting, draw an arc with center B conjectures and build a on each side of AB— . Label the C O D logical progression of intersections of the arcs C and D. statements to explore the c. Draw CD — . Label its intersection truth of your conjectures. — with AB as O. Write a conjecture B about the resulting diagram. Justify your conjecture. CCommunicateommunicate YourYour AnswerAnswer 4. What conjectures can you make about perpendicular lines? 5. In Exploration 3, f nd AO and OB when AB = 4 units. -

Celestial Navigation Tutorial
NavSoft’s CELESTIAL NAVIGATION TUTORIAL Contents Using a Sextant Altitude 2 The Concept Celestial Navigation Position Lines 3 Sight Calculations and Obtaining a Position 6 Correcting a Sextant Altitude Calculating the Bearing and Distance ABC and Sight Reduction Tables Obtaining a Position Line Combining Position Lines Corrections 10 Index Error Dip Refraction Temperature and Pressure Corrections to Refraction Semi Diameter Augmentation of the Moon’s Semi-Diameter Parallax Reduction of the Moon’s Horizontal Parallax Examples Nautical Almanac Information 14 GHA & LHA Declination Examples Simplifications and Accuracy Methods for Calculating a Position 17 Plane Sailing Mercator Sailing Celestial Navigation and Spherical Trigonometry 19 The PZX Triangle Spherical Formulae Napier’s Rules The Concept of Using a Sextant Altitude Using the altitude of a celestial body is similar to using the altitude of a lighthouse or similar object of known height, to obtain a distance. One object or body provides a distance but the observer can be anywhere on a circle of that radius away from the object. At least two distances/ circles are necessary for a position. (Three avoids ambiguity.) In practice, only that part of the circle near an assumed position would be drawn. Using a Sextant for Celestial Navigation After a few corrections, a sextant gives the true distance of a body if measured on an imaginary sphere surrounding the earth. Using a Nautical Almanac to find the position of the body, the body’s position could be plotted on an appropriate chart and then a circle of the correct radius drawn around it. In practice the circles are usually thousands of miles in radius therefore distances are calculated and compared with an estimate. -

Indoor Wireless Localization Using Haversine Formula
ISSN (Online) 2393-8021 ISSN (Print) 2394-1588 International Advanced Research Journal in Science, Engineering and Technology Vol. 2, Issue 7, July 2015 Indoor Wireless Localization using Haversine Formula Ganesh L1, DR. Vijaya Kumar B P2 M. Tech (Software Engineering), 4th Semester, M S Ramaiah Institute of Technology (Autonomous Institute Affiliated to VTU)Bangalore, Karnataka, India1 Professor& HOD, Dept. of ISE, MSRIT, Bangalore, Karnataka, India2 Abstract: Indoor wireless Localization is essential for most of the critical environment or infrastructure created by man. Technological growth in the areas of wireless communication access techniques, high speed information processing and security has made to connect most of the day-to-day usable things, place and situations to be connected to the internet, named as Internet of Things(IOT).Using such IOT infrastructure providing an accurate or high precision localization is a smart and challenging issue. In this paper, we have proposed mapping model for locating a static or a mobile electronic communicable gadgets or the things to which such electronic gadgets are connected. Here, 4-way mapping includes the planning and positioning of wireless AP building layout, GPS co-ordinate and the signal power between the electronic gadget and access point. The methodology uses Haversine formula for measurement and estimation of distance with improved efficiency in localization. Implementation model includes signal measurements with wifi position, GPS values and building layout to identify the precise location for different scenarios is considered and evaluated the performance of the system and found that the results are more efficient compared to other methodologies. Keywords: Localization, Haversine, GPS (Global positioning system) 1. -
1 Chapter 3 Plane and Spherical Trigonometry 3.1
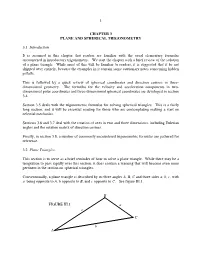
1 CHAPTER 3 PLANE AND SPHERICAL TRIGONOMETRY 3.1 Introduction It is assumed in this chapter that readers are familiar with the usual elementary formulas encountered in introductory trigonometry. We start the chapter with a brief review of the solution of a plane triangle. While most of this will be familiar to readers, it is suggested that it be not skipped over entirely, because the examples in it contain some cautionary notes concerning hidden pitfalls. This is followed by a quick review of spherical coordinates and direction cosines in three- dimensional geometry. The formulas for the velocity and acceleration components in two- dimensional polar coordinates and three-dimensional spherical coordinates are developed in section 3.4. Section 3.5 deals with the trigonometric formulas for solving spherical triangles. This is a fairly long section, and it will be essential reading for those who are contemplating making a start on celestial mechanics. Sections 3.6 and 3.7 deal with the rotation of axes in two and three dimensions, including Eulerian angles and the rotation matrix of direction cosines. Finally, in section 3.8, a number of commonly encountered trigonometric formulas are gathered for reference. 3.2 Plane Triangles . This section is to serve as a brief reminder of how to solve a plane triangle. While there may be a temptation to pass rapidly over this section, it does contain a warning that will become even more pertinent in the section on spherical triangles. Conventionally, a plane triangle is described by its three angles A, B, C and three sides a, b, c, with a being opposite to A, b opposite to B, and c opposite to C. -

Using Non-Euclidean Geometry to Teach Euclidean Geometry to K–12 Teachers
Using non-Euclidean Geometry to teach Euclidean Geometry to K–12 teachers David Damcke Department of Mathematics, University of Portland, Portland, OR 97203 [email protected] Tevian Dray Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] Maria Fung Mathematics Department, Western Oregon University, Monmouth, OR 97361 [email protected] Dianne Hart Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] Lyn Riverstone Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] January 22, 2008 Abstract The Oregon Mathematics Leadership Institute (OMLI) is an NSF-funded partner- ship aimed at increasing mathematics achievement of students in partner K–12 schools through the creation of sustainable leadership capacity. OMLI’s 3-week summer in- stitute offers content and leadership courses for in-service teachers. We report here on one of the content courses, entitled Comparing Different Geometries, which en- hances teachers’ understanding of the (Euclidean) geometry in the K–12 curriculum by studying two non-Euclidean geometries: taxicab geometry and spherical geometry. By confronting teachers from mixed grade levels with unfamiliar material, while mod- eling protocol-based pedagogy intended to emphasize a cooperative, risk-free learning environment, teachers gain both content knowledge and insight into the teaching of mathematical thinking. Keywords: Cooperative groups, Euclidean geometry, K–12 teachers, Norms and protocols, Rich mathematical tasks, Spherical geometry, Taxicab geometry 1 1 Introduction The Oregon Mathematics Leadership Institute (OMLI) is a Mathematics/Science Partner- ship aimed at increasing mathematics achievement of K–12 students by providing professional development opportunities for in-service teachers. -

And Are Lines on Sphere B That Contain Point Q
11-5 Spherical Geometry Name each of the following on sphere B. 3. a triangle SOLUTION: are examples of triangles on sphere B. 1. two lines containing point Q SOLUTION: and are lines on sphere B that contain point Q. ANSWER: 4. two segments on the same great circle SOLUTION: are segments on the same great circle. ANSWER: and 2. a segment containing point L SOLUTION: is a segment on sphere B that contains point L. ANSWER: SPORTS Determine whether figure X on each of the spheres shown is a line in spherical geometry. 5. Refer to the image on Page 829. SOLUTION: Notice that figure X does not go through the pole of ANSWER: the sphere. Therefore, figure X is not a great circle and so not a line in spherical geometry. ANSWER: no eSolutions Manual - Powered by Cognero Page 1 11-5 Spherical Geometry 6. Refer to the image on Page 829. 8. Perpendicular lines intersect at one point. SOLUTION: SOLUTION: Notice that the figure X passes through the center of Perpendicular great circles intersect at two points. the ball and is a great circle, so it is a line in spherical geometry. ANSWER: yes ANSWER: PERSEVERANC Determine whether the Perpendicular great circles intersect at two points. following postulate or property of plane Euclidean geometry has a corresponding Name two lines containing point M, a segment statement in spherical geometry. If so, write the containing point S, and a triangle in each of the corresponding statement. If not, explain your following spheres. reasoning. 7. The points on any line or line segment can be put into one-to-one correspondence with real numbers. -

Models for Earth and Maps
Earth Models and Maps James R. Clynch, Naval Postgraduate School, 2002 I. Earth Models Maps are just a model of the world, or a small part of it. This is true if the model is a globe of the entire world, a paper chart of a harbor or a digital database of streets in San Francisco. A model of the earth is needed to convert measurements made on the curved earth to maps or databases. Each model has advantages and disadvantages. Each is usually in error at some level of accuracy. Some of these error are due to the nature of the model, not the measurements used to make the model. Three are three common models of the earth, the spherical (or globe) model, the ellipsoidal model, and the real earth model. The spherical model is the form encountered in elementary discussions. It is quite good for some approximations. The world is approximately a sphere. The sphere is the shape that minimizes the potential energy of the gravitational attraction of all the little mass elements for each other. The direction of gravity is toward the center of the earth. This is how we define down. It is the direction that a string takes when a weight is at one end - that is a plumb bob. A spirit level will define the horizontal which is perpendicular to up-down. The ellipsoidal model is a better representation of the earth because the earth rotates. This generates other forces on the mass elements and distorts the shape. The minimum energy form is now an ellipse rotated about the polar axis. -

Geometry: Euclid and Beyond, by Robin Hartshorne, Springer-Verlag, New York, 2000, Xi+526 Pp., $49.95, ISBN 0-387-98650-2
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 39, Number 4, Pages 563{571 S 0273-0979(02)00949-7 Article electronically published on July 9, 2002 Geometry: Euclid and beyond, by Robin Hartshorne, Springer-Verlag, New York, 2000, xi+526 pp., $49.95, ISBN 0-387-98650-2 1. Introduction The first geometers were men and women who reflected on their experiences while doing such activities as building small shelters and bridges, making pots, weaving cloth, building altars, designing decorations, or gazing into the heavens for portentous signs or navigational aides. Main aspects of geometry emerged from three strands of early human activity that seem to have occurred in most cultures: art/patterns, navigation/stargazing, and building structures. These strands developed more or less independently into varying studies and practices that eventually were woven into what we now call geometry. Art/Patterns: To produce decorations for their weaving, pottery, and other objects, early artists experimented with symmetries and repeating patterns. Later the study of symmetries of patterns led to tilings, group theory, crystallography, finite geometries, and in modern times to security codes and digital picture com- pactifications. Early artists also explored various methods of representing existing objects and living things. These explorations led to the study of perspective and then projective geometry and descriptive geometry, and (in the 20th century) to computer-aided graphics, the study of computer vision in robotics, and computer- generated movies (for example, Toy Story ). Navigation/Stargazing: For astrological, religious, agricultural, and other purposes, ancient humans attempted to understand the movement of heavenly bod- ies (stars, planets, Sun, and Moon) in the apparently hemispherical sky. -

Anaximander and the Problem of the Earth's Immobility
Binghamton University The Open Repository @ Binghamton (The ORB) The Society for Ancient Greek Philosophy Newsletter 12-28-1953 Anaximander and the Problem of the Earth's Immobility John Robinson Windham College Follow this and additional works at: https://orb.binghamton.edu/sagp Recommended Citation Robinson, John, "Anaximander and the Problem of the Earth's Immobility" (1953). The Society for Ancient Greek Philosophy Newsletter. 263. https://orb.binghamton.edu/sagp/263 This Article is brought to you for free and open access by The Open Repository @ Binghamton (The ORB). It has been accepted for inclusion in The Society for Ancient Greek Philosophy Newsletter by an authorized administrator of The Open Repository @ Binghamton (The ORB). For more information, please contact [email protected]. JOHN ROBINSON Windham College Anaximander and the Problem of the Earth’s Immobility* N the course of his review of the reasons given by his predecessors for the earth’s immobility, Aristotle states that “some” attribute it I neither to the action of the whirl nor to the air beneath’s hindering its falling : These are the causes with which most thinkers busy themselves. But there are some who say, like Anaximander among the ancients, that it stays where it is because of its “indifference” (όμοιότητα). For what is stationed at the center, and is equably related to the extremes, has no reason to go one way rather than another—either up or down or sideways. And since it is impossible for it to move simultaneously in opposite directions, it necessarily stays where it is.1 The ascription of this curious view to Anaximander appears to have occasioned little uneasiness among modern commentators. -

Spherical Trigonometry
Spherical trigonometry 1 The spherical Pythagorean theorem Proposition 1.1 On a sphere of radius R, any right triangle 4ABC with \C being the right angle satisfies cos(c=R) = cos(a=R) cos(b=R): (1) Proof: Let O be the center of the sphere, we may assume its coordinates are (0; 0; 0). We may rotate −! the sphere so that A has coordinates OA = (R; 0; 0) and C lies in the xy-plane, see Figure 1. Rotating z B y O(0; 0; 0) C A(R; 0; 0) x Figure 1: The Pythagorean theorem for a spherical right triangle around the z axis by β := AOC takes A into C. The edge OA moves in the xy-plane, by β, thus −−!\ the coordinates of C are OC = (R cos(β);R sin(β); 0). Since we have a right angle at C, the plane of 4OBC is perpendicular to the plane of 4OAC and it contains the z axis. An orthonormal basis −−! −! of the plane of 4OBC is given by 1=R · OC = (cos(β); sin(β); 0) and the vector OZ := (0; 0; 1). A rotation around O in this plane by α := \BOC takes C into B: −−! −−! −! OB = cos(α) · OC + sin(α) · R · OZ = (R cos(β) cos(α);R sin(β) cos(α);R sin(α)): Introducing γ := \AOB, we have −! −−! OA · OB R2 cos(α) cos(β) cos(γ) = = : R2 R2 The statement now follows from α = a=R, β = b=R and γ = c=R. ♦ To prove the rest of the formulas of spherical trigonometry, we need to show the following. -

Calculating Geographic Distance: Concepts and Methods Frank Ivis, Canadian Institute for Health Information, Toronto, Ontario, Canada
NESUG 2006 Data ManipulationData andManipulation Analysis Calculating Geographic Distance: Concepts and Methods Frank Ivis, Canadian Institute for Health Information, Toronto, Ontario, Canada ABSTRACT Calculating the distance between point locations is often an important component of many forms of spatial analy- sis in business and research. Although specialized software is available to perform this function, the power and flexibility of Base SAS® makes it easy to compute a variety of distance measures. An added advantage is that these measures can be customized according to specific user requirements and seamlessly incorporated with other SAS code. This paper outlines the basic concepts and methods involved in calculating geographic distance. Topics include distance calculations in two dimensions, considerations when dealing with latitude and longitude, measuring spherical distance, and map projections. In addition, several queries and calculations based on dis- tances are also demonstrated. INTRODUCTION For many types of databases, determining the distance between locations is often of considerable interest. From a company’s customer database, for example, one might want to examine the distances between customers’ homes and the retail locations where they had made purchases. Similarly, the distance between patients and hospitals may be used as a measure of accessibility to healthcare. In both these cases, an appropriate formula is required to calculate distances. The proper formula will depend on the nature of the data, the goals of the analy- sis, and the type of co-ordinates. The purpose of this paper is to outline various considerations in calculating geographic distances and provide appropriate implementations of the formulae in SAS. Some additional summary measures based on calculated distances will also be presented. -

Haversine Formula Implementation to Determine Bandung City School Zoning Using Android Based Location Based Service
Haversine Formula Implementation to Determine Bandung City School Zoning Using Android Based Location Based Service Undang Syaripudin 1, Niko Ahmad Fauzi 2, Wisnu Uriawan 3, Wildan Budiawan Z 4, Ali Rahman 5 {[email protected] 1, [email protected] 2, [email protected] 3, [email protected] 4, [email protected] 5} Department of Informatics, UIN Sunan Gunung Djati Bandung 1,2,3,4,5 Abstract. The spread of schools in Bandung city, make the parents have difficulties choose which school is the nearest from the house. Therefore, when the children will go to school the just can go by foot. So, the purpose of this research is to make an application to determined the closest school based on zonation system using Haversine Formula as the calculation of the distance between school position with the house, and Location Based Service as the service to pointed the early position using Global Positioning System (GPS). The result of the research show that the accuracy of this calculation reaches 98% by comparing the default calculations from Google. Haversine Formula is very suitable to be applied in this research with the results which are not much different. Keywords: Global Positioning System (GPS), Bandung City, Haversine Formula, Location Based Service, zonation system, Rational Unified Process (RUP), PPDB 1 Introduction Starting in 2017, the Ministry of Education and Culture implements a zoning system for each school valid from elementary to high school/ vocational school. This zoning system aims to equalize the right to obtain education for school-age students. The PPDB revenue system is no longer based on academic achievement, but based on the distance of the student's residence with the school (zoning).