Microcontrollers Tackle Networking Chores
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Humidity & Temperature Sensor
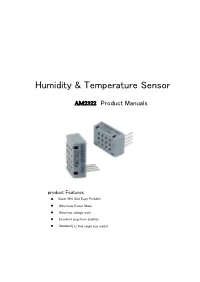
Humidity & Temperature Sensor AM2322 Product Manuals product Features Super Mini Size Easy Protable Ultra-Low Power State Ultra-low voltage work Excellent long-term stability StandardI2C And single bus output 一、 Product Overview AM2322 The digital temperature and humidity sensor is a kind of temperature and humidity composite sensor with the output of calibrated digitalsignal.The special temperature and humidity collection technology is adopted to ensure the high reliability and long-term stability of the product.The sensor includes a capacitive sensing element and a high-precision integrated temperature measurement element, which is connected to a high- performance microprocessor.The product has high quality, super fast response, strong anti-interference ability and high cost performance. AM2322 communication mode adopts single bus, standard I squared C communication mode.Standard single bus interface makes system integration easy and fast.The super small volume, extremely low power consumption, the signal transmission distance can reach up to 20 meters, making it the best choice for all kinds of Two kinds of communication mode is used directly output after applications and even the most demanding applications.The I temperature compensation, humidity, temperature and the CRC squared C communication mode adopts standard communication check and other digital information, users need to secondary timing, and the user can be directly attached to the I squared C calculation of digital output, also need not to compensate the communication bus, with no additional wiring and simple use. temperature humidity, accurate temperature and humidity information can be got.The two modes of communication are free to switch, users are free to choose, easy to use, and should be widely used.The product is 4 lead wire and convenient connection. -

Allgemeines Abkürzungsverzeichnis
Allgemeines Abkürzungsverzeichnis L. -
Dell EMC Poweredge T340 Technical Guide
Dell EMC PowerEdge T340 Technical Guide Regulatory Model: E60S Regulatory Type: E60S001 Dec. 2020 Rev. A07 Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps you make better use of your product. CAUTION: A CAUTION indicates either potential damage to hardware or loss of data and tells you how to avoid the problem. WARNING: A WARNING indicates a potential for property damage, personal injury, or death. © 2018 - 2020 Dell Inc. or its subsidiaries. All rights reserved. Dell, EMC, and other trademarks are trademarks of Dell Inc. or its subsidiaries. Other trademarks may be trademarks of their respective owners. 1 Product Overview Topics: • Introduction • New technologies Introduction The Dell EMC PowerEdge T340 is the reliable, easy to manage, and scalable 1-socket tower server for growing businesses and remote offices/ branch offices. New technologies The PowerEdge T340 equipped with Intel® Xeon® E-2100 and E-2200 product family processors support to help run applications faster and support for full-feature remote management (iDRAC9). The T340 is versatile enough to address many customer segments and workloads. Target workloads include ● Small and medium businesses and organizations: Collaboration/sharing productivity applications, databases, web serving, backup/recovery, and mail and messaging. ● ROBO: Applications and workloads specific to the particular industry, e.g. Retail, Healthcare, Finance, Education, etc. The following table shows the list of new technologies offered by the PowerEdge T340: New Technologies Detailed Descriptions Intel® C246 series chipset Please refer to the chipset section for details. Intel® Xeon® processor E- 2100 and E-2200 Product The Intel® processor that works with Intel® C246 series Family chipset. -

3. System Management Bus
Input/Output Systems and Peripheral Devices 1 3. SYSTEM MANAGEMENT BUS This laboratory work presents the System Management Bus (SMBus). After an over- view of SMBus, bit and data transfers are described, the bus arbitration procedure is present- ed, the differences between SMBus and the I2C bus are highlighted, and several command protocols are detailed. Next, the Intel SMBus controller is presented, including its registers and commands, as well as its use with I2C devices. The applications aim to detect the devices connected to the computer’s SMBus, read the contents of SPD memories present in the sys- tem, and decode the contents of these memories. 3.1. Overview of SMBus System Management Bus (SMBus) is a simple serial bus with only two signal lines. This bus can be used for communication between various system devices and between these devices and the rest of a system. The operating principles of SMBus are similar to those of the I2C bus. There are, however, several differences between the two buses, differences which will be presented later. SMBus represents a control bus for system management and power management op- erations. A system may use the SMBus to transfer messages to and from various devices in- stead of using individual control lines, which allows to reduce pin count and interconnection wires. A device may use the SMBus to provide manufacturer information, provide the device model number, report different types of errors, accept control parameters, and return the de- vice status. SMBus was initially proposed by Intel as a link between an intelligent battery, a charger for the battery and a microcontroller that communicates with the rest of the system. -

Field Networking Solutions
Field Networking Solutions Courtesy of Steven Engineering, Inc. ! 230 Ryan Way, South San Francisco, CA 94080-6370 ! Main Office: (650) 588-9200 ! Outside Local Area: (800) 258-9200 ! www.stevenengineering.com TYPES OF FIELDBUS NETWORKS* Field Networking 101 Features and Benefits of Fieldbus Networks The combination of intelligent field devices, digital bus networks, and various open communications protocols Fieldbus networks provide an array of features and benefits that make them an excellent choice is producing extraordinary results at process plants in nearly all process control environments. around the world. Compared to conventional technology, fieldbus networks deliver the following benefits: Just as our ability to retrieve, share, and analyze data Reduced field wiring costs has increased tremendously by use of the Internet and - Two wires from the control room to many devices PC network technology in our homes and at our desk- Reduced commissioning costs tops, so has our ability to control and manage our - Less time and personnel needed to perform process plants improved. Digital connectivity in process I/O wiring checkouts - No time spent calibrating intermediate signals manufacturing plants provides an infrastructure for the (such as 4-20mA signals) - Digital values are delivered directly from field flow of real-time data from the process level, making it devices, increasing accuracy available throughout our enterprise networks. This data Reduced engineering/operating costs is being used at all levels of the enterprise to provide - Much smaller space required for panels, I/O racks, and connectivity boxes increased process monitoring and control, inventory and - Fewer I/O cards and termination panels for materials planning, advanced diagnostics, maintenance control system equipment - Lower power consumption by control system planning, and asset management. -

Tms320f28004x Microcontrollers Datasheet (Rev. F)
TMS320F280049, TMS320F280049C, TMS320F280048, TMS320F280048C, TMS320F280045, TMS320F280049, TMS320F280049C,TMS320F280041, TMS320F280041C, TMS320F280048, TMS320F280048C,TMS320F280040, TMS320F280040C TMS320F280045, www.ti.com TMS320F280041, TMS320F280041C,SPRS945F –TMS320F280040, JANUARY 2017 – REVISED TMS320F280040C FEBRUARY 2021 SPRS945F – JANUARY 2017 – REVISED FEBRUARY 2021 TMS320F28004x Microcontrollers 1 Features – Embedded Real-time Analysis and Diagnostic (ERAD) • TMS320C28x 32-bit CPU • Communications peripherals – 100 MHz – One Power-Management Bus (PMBus) – IEEE 754 single-precision Floating-Point Unit interface (FPU) – One Inter-integrated Circuit (I2C) interface – Trigonometric Math Unit (TMU) (pin-bootable) • 3×-cycle to 4×-cycle improvement for – Two Controller Area Network (CAN) bus ports common trigonometric functions versus (pin-bootable) software libraries – Two Serial Peripheral Interface (SPI) ports • 13-cycle Park transform (pin-bootable) – Viterbi/Complex Math Unit (VCU-I) – Two Serial Communication Interfaces (SCIs) – Ten hardware breakpoints (with ERAD) (pin-bootable) • Programmable Control Law Accelerator (CLA) – One Local Interconnect Network (LIN) – 100 MHz – One Fast Serial Interface (FSI) with a – IEEE 754 single-precision floating-point transmitter and receiver instructions • Analog system – Executes code independently of main CPU – Three 3.45-MSPS, 12-bit Analog-to-Digital • On-chip memory Converters (ADCs) – 256KB (128KW) of flash (ECC-protected) • Up to 21 external channels across two independent banks -

CP2725AC54TE Compact Power Line High Efficiency Rectifier 100-120/200-277VAC Input; Default Outputs: ±54VDC @ 2725W, 5VDC @ 4W
GE Data Sheet CP2725AC54TE Compact Power Line High Efficiency Rectifier 100-120/200-277VAC input; Default Outputs: ±54VDC @ 2725W, 5VDC @ 4W RoHS Compliant Features • Efficiency 96.2% • Compact 1RU form factor with 30 W/in3 density • Constant power from 52 – 58VDC • 2725W from nominal 200 – 277VAC • 1200W from nominal 100 – 120VAC • Output voltage programmable from 42V – 58VDC • PMBus compliant dual I2C and RS485 serial busses • Isolated +5V Aux, signals and I2C communications • Power factor correction (meets EN/IEC 61000-3-2 and EN 60555-2 requirements) Applications • Output overvoltage and overload protection • 48VDC distributed power architectures • AC Input overvoltage and undervoltage protection • Routers/Switches • Over-temperature warning and protection • VoIP/Soft Switches • Redundant, parallel operation with active load sharing • LAN/WAN/MAN applications • Remote ON/OFF • File servers • Internally controlled Variable-speed fan • Indoor wireless • Hot insertion/removal (hot plug) • Telecommunications equipment • Four front panel LED indicators • Enterprise Networks • UL* Recognized to UL60950-1, CAN/ CSA† C22.2 No. • SAN/NAS/iSCSI applications 60950-1, and VDE‡ 0805-1 Licensed to IEC60950-1 § • CE mark meets 2006/95/EC directive • RoHS Directive 2011/65/EU and amended Directive (EU) 2015/863 Description • Conformally coated option The CP2725AC54TE Rectifier provides significant efficiency improvements in the Compact Power Line platform of Rectifiers. High- density front-to-back airflow is designed for minimal space utilization and is highly expandable for future growth. The wide-input standard product is designed to be deployed internationally. It is configured with both RS485 and dual-redundant I2C communications busses that allow it to be used in a broad range of applications. -

EPC612D8A-TB EPC612D8A EPC612D8 User Manual
EPC612D8A-TB EPC612D8A EPC612D8 User Manual Version 1.1 Published August 2016 Copyright©2016 ASRock Rack INC. All rights reserved. Version 1.1 Published October 2016 Copyright©2016 ASRock Rack Inc. All rights reserved. Copyright Notice: No part of this documentation may be reproduced, transcribed, transmitted, or translated in any language, in any form or by any means, except duplication of documentation by the purchaser for backup purpose, without written consent of ASRock Rack Inc. Products and corporate names appearing in this documentation may or may not be registered trademarks or copyrights of their respective companies, and are used only for identification or explanation and to the owners’ benefit, without intent to infringe. Disclaimer: Specifications and information contained in this documentation are furnished for informational use only and subject to change without notice, and should not be constructed as a commitment by ASRock Rack. ASRock Rack assumes no responsibility for any errors or omissions that may appear in this documentation. With respect to the contents of this documentation, ASRock Rack does not provide warranty of any kind, either expressed or implied, including but not limited to the implied warranties or conditions of merchantability or fitness for a particular purpose. In no event shall ASRock Rack, its directors, officers, employees, or agents be liable for any indirect, special, incidental, or consequential damages (including damages for loss of profits, loss of business, loss of data, interruption of business and the like), even if ASRock Rack has been advised of the possibility of such damages arising from any defect or error in the documentation or product. -

FSU Technical Manual
PROGRAMMABLE CONTROLLER FPS/FP2 Fieldbus Slave Units Technical Manual BEFORE BEGINNING Liability and Copyright for the Hardware This manual and everything described in it are copyrighted. You may not copy this manual, in whole or part, without written consent of Panasonic Electric Works Europe AG (PEWEU). PEWEU pursues a policy of continuous improvement of the design and performance of its products. Therefore we reserve the right to change the manual/product without notice. In no event will PEWEU be liable for direct, special, incidental, or consequential damage resulting from any defect in the product or its documentation, even if advised of the possibility of such damages. We invite your comments on this manual. Please e-mail us at: [email protected]. Please direct support matters and technical questions to your local Panasonic representative. LIMITED WARRANTY If physical defects caused by distribution are found, PEWEU will replace/repair the product free of charge. Exceptions include: When physical defects are due to different usage/treatment of the product other than described in the manual. When physical defects are due to defective equipment other than the distributed product. When physical defects are due to modifications/repairs by someone other than PEWEU. When physical defects are due to natural disasters. Important symbols One or more of the following symbols may be used in this documentation: DANGER! The warning triangle indicates especially important safety instructions. If they are not adhered to, the results could be fatal or critical injury. Indicates that you should proceed with caution. Failure to do so may result in injury or significant damage to instruments or their contents, e.g. -

SBIR Program Document
Topic Index and Description A20-101 Continuous Flow Recrystallization of Energetic Nitramines A20-102 Deep Neural Network Learning Based Tools for Embedded Systems Under Side Channel Attacks A20-103 Beyond Li-Ion Batteries in Electric Vehicles (EV) A20-104 Wireless Power transfer A20-105 Direct Wall Shear Stress Measurement for Rotor Blades A20-106 Electronically-Tunable, Low Loss Microwave Thin-film Ferroelectric Phase-Shifter A20-107 Automated Imagery Annotation and Segmentation for Military Tactical Objects A20-108 Multi-Solution Precision Location Determination System to be Operational in a Global Positioning System (GPS) Denied Environment for Static, Dynamic and Autonomous Systems under Test A20-109 Environmentally Adaptive Free-Space Optical Communication A20-110 Localized High Bandwidth Wireless Secure Mesh Network A20-111 Non-Destructive Evaluation of Bonded Interface of Cold Spray Additive Repair A20-112 Compact, High Performance Engines for Air Launched Effects UAS A20-113 Optical Based Health Usage and Monitoring System (HUMS) A20-114 3-D Microfabrication for In-Plane Optical MEMS Inertial Sensors A20-115 Using Artificial Intelligence to Optimize Missile Sustainment Trade-offs A20-116 Distributed Beamforming for Non-Developmental Waveforms A20-117 Lens Antennas for Resilient Satellite Communications (SATCOM) on Ground Tactical Vehicles A20-118 Novel, Low SWaP-C Unattended Ground Sensors for Relevant SA in A2AD Environments A20-119 Efficient Near Field Charge Transfer Mediated Infrared Detectors A20-120 Very Small Pixel Uncooled -

Dell EMC Poweredge C4140 Technical Guide
Dell EMC PowerEdge C4140 Technical Guide Regulatory Model: E53S Series Regulatory Type: E53S001 Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps you make better use of your product. CAUTION: A CAUTION indicates either potential damage to hardware or loss of data and tells you how to avoid the problem. WARNING: A WARNING indicates a potential for property damage, personal injury, or death. © 2017 - 2019 Dell Inc. or its subsidiaries. All rights reserved. Dell, EMC, and other trademarks are trademarks of Dell Inc. or its subsidiaries. Other trademarks may be trademarks of their respective owners. 2019 - 09 Rev. A00 Contents 1 System overview ......................................................................................................................... 5 Introduction............................................................................................................................................................................ 5 New technologies.................................................................................................................................................................. 5 2 System features...........................................................................................................................7 Specifications......................................................................................................................................................................... 7 Product comparison............................................................................................................................................................. -
Intel® Agilex™ Device Data Sheet
Intel® Agilex™ Device Data Sheet Subscribe DS-1060 | 2021.06.02 Send Feedback Latest document on the web: PDF | HTML Contents Contents Intel® Agilex™ Device Data Sheet............................................................................................................................................... 3 Electrical Characteristics...................................................................................................................................................... 5 Operating Conditions..................................................................................................................................................5 Switching Characteristics....................................................................................................................................................27 Core Performance Specifications.................................................................................................................................28 Periphery Performance Specifications.......................................................................................................................... 37 E-Tile Transceiver Performance Specifications...............................................................................................................46 P-Tile Transceiver Performance Specifications...............................................................................................................50 R-Tile Transceiver Performance Specifications...............................................................................................................55