Richard Delaney, Ropelab
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Wrestling with Liability: Encouraging Climbing on Private Land Page 9
VERTICAL TIMESSection The National Publication of the Access Fund Winter 09/Volume 86 www.accessfund.org Wrestling with Liability: Encouraging Climbing on Private Land page 9 CHOOSING YOUR COnseRvatION STRateGY 6 THE NOTORIOUS HORsetOOTH HanG 7 Winter 09 Vertical Times 1 QUeen CReeK/OaK Flat: NEGOTIATIONS COntINUE 12 AF Perspective “ All the beautiful sentiments in the world weigh less than a single lovely action.” — James Russell Lowell irst of all, I want to take a moment to thank you for all you’ve done to support us. Without members and donors like you, we would fall short F of accomplishing our goals. I recently came across some interesting statistics in the Outdoor Foundation’s annual Outdoor Recreation Participation Report. In 2008, 4.7 million people in the United States participated in bouldering, sport climbing, or indoor climbing, and 2.3 million people went trad climbing, ice climbing, or mountaineering. It is also interesting to note that less than 1% of these climbers are members of the Access Fund. And the majority of our support comes from membership. We are working on climbing issues all across the country, from California to Maine. While we have had many successes and our reach is broad, just imagine what would be possible if we were able to increase our membership base: more grants, more direct support of local climbing organizations, and, ultimately, more climbing areas open and protected. We could use your help. Chances are a number of your climbing friends and partners aren’t current Access Fund members. Please take a moment to tell them about our work and the impor- tance of joining us, not to mention benefits like discounts on gear, grants for local projects, timely information and alerts about local access issues, and a subscrip- tion to the Vertical Times. -

Descender Ascender Fall Arrester Belay Device Rescue
TECHNICAL SHEET INTERNATIONAL Ref.0997 GIANT + An innovative multifunctional descender developed to meet the ROPE ACCESS TREE CLIMBING TEAM RESCUE SELF RESCUE demands of the most technical rope access and rescue specialists. The patented internal mechanism combines with robust hot-forged construction and advanced ergonomics for exceptional control even with heavy loads (up to 250 kg for two person scenarios). In addition to its primary function as a descender, the Giant is also Descender certified for use as a fall arrest device (i.e. during rope transfers), as an ascender with smooth upward glide, and as a belay device for Ascender climbing, making it the most widely certified rope tool of its kind. The actuating lever features an anti-panic system that locks the rope Fall arrester and arrests the descent in case of excessive pressure on the lever by the user as well as an extra lock off position so the worker does not have to tie off the device. Belay device An external button can be used to hold the cam open allowing the rope to slide easily in situations with limited or no load. Rescue use The device can be opened to insert or remove the rope without removing the carabiner (this helps prevent the possibility of dropping the device). The large attachment hole allows for the insertion of a second carabiner making the two plates unopenable. The logical circular rope path along with clear internal and external markings makes installation of the rope simple and intuitive. Standards: - EN 12841 as a rope access device for semi-static ropes ranging from 10 to 11.5 mm: - Type C: descender of the working line for loads up to 250 kg (from 11 to 11.5 mm) or 210 kg (from 10 to 10.9 mm); - Type B: ascender of the working line for loads up to 250 kg (from 11 to 11.5 mm) or 210 kg (from 10 to 10.9 mm); - Type A: fall arrester for the safety line for loads up to 120 kg. -

Analysis of the Accident on Air Guitar
Analysis of the accident on Air Guitar The Safety Committee of the Swedish Climbing Association Draft 2004-05-30 Preface The Swedish Climbing Association (SKF) Safety Committee’s overall purpose is to reduce the number of incidents and accidents in connection to climbing and associated activities, as well as to increase and spread the knowledge of related risks. The fatal accident on the route Air Guitar involved four failed pieces of protection and two experienced climbers. Such unusual circumstances ring a warning bell, calling for an especially careful investigation. The Safety Committee asked the American Alpine Club to perform a preliminary investigation, which was financed by a company formerly owned by one of the climbers. Using the report from the preliminary investigation together with additional material, the Safety Committee has analyzed the accident. The details and results of the analysis are published in this report. There is a large amount of relevant material, and it is impossible to include all of it in this report. The Safety Committee has been forced to select what has been judged to be the most relevant material. Additionally, the remoteness of the accident site, and the difficulty of analyzing the equipment have complicated the analysis. The causes of the accident can never be “proven” with certainty. This report is not the final word on the accident, and the conclusions may need to be changed if new information appears. However, we do believe we have been able to gather sufficient evidence in order to attempt an -

Actsafe T1-16 Tactical Ascender
USER’S MANUAL Rev 1-2011 ENG ActSafe T1-16 Tactical Ascender User’s Manual T1-16 Tactical Ascender 2 T1-16 Tactical Ascender User’s Manual revision 1-2011 © Copyright 2011 ActSafe Systems AB www.actsafe-tactical.com [email protected] 2 © Copyright ActSafe Systems AB Table of contents INTRODUCTION 4 Remote control usage 23 Foreword 4 Covert mode 23 About ActSafe 4 Operation in water 24 About this manual 4 Emergency descent 25 Definitions 5 Charging 26 Disclaimer 5 Transportation 26 Storage 26 SAFETY 6 Ascender safety 6 ACCESSORIES 27 General safety measures 6 Quick-out karabiner 27 Work method analysis recommendation 7 Rope system safety 8 SERVICE & MAINTENANCE 30 Personal safety 9 Clean the ascender 30 Rope recommendation 8 Clean the charging pins 30 Training 10 Changing the primary connection sling 30 Changing the rope grab system 30 SYSTEM DESCRIPTION 11 Remote control, changing the battery 30 General 12 Equipment list 32 Control panel 12 Material 32 Battery 13 Spare parts 32 Battery indicator 14 Remote control 15 TROUBLE SHOOTING GUIDE 33 Operation in water 16 Buoyancy aid 16 WARRANTY & GUARANTEE 36 Emergency descent 17 Limitation of liability 36 Charger 18 Overload/heat monitoring/protection 18 TECHNICAL DATA 37 USAGE 19 APPENDIX 38 Checklist before and after use 19 Connect to rope 20 Ascent & descent 21 Twisted rope, rotation 22 User’s Manual T1-16 Tactical Ascender 3 INTRODUCTION INTRODUCTION Foreword About this manual Thank you for choosing a product from The information in this manual cannot ActSafe Systems AB®. replace training and exercise. The ascender When used correctly this ascender will must only be used by personnel who have revolutionize the way you work at height. -
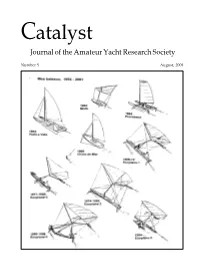
Catalyst N05 Jul 200
Catalyst Journal of the Amateur Yacht Research Society Number 5 August, 2001 Catalyst News and Views 3 Winds of Change 2001 6 Keiper Foils 7 Letters Features 10 Wind Profiles and Yacht Sails Mike Brettle 19 Remarks on Hydrofoil Sailboats Didier Costes 26 Designing Racing Dinghies Part 2 Jim Champ 29 Rotors Revisited Joe Norwood Notes from Toad Hill 33 A Laminar Flow Propulsion System Frank Bailey 36 Catalyst Calendar On the Cover Didier Costes boats (See page 19) AUGUST 2001 1 Catalyst Meginhufers and other antiquities I spent most of July in Norway, chasing the midnight sun Journal of the and in passing spending a fair amount of time in Norway’s Amateur Yacht Research Society maritime museums looking at the development history of the smaller Viking boats. Editorial Team — Now as most AYRS members will know, the Vikings rowed Simon Fishwick and sailed their boats and themselves over all of Northern Sheila Fishwick Europe, and as far away as Newfoundland to the west and Russia and Constantinople to the east. Viking boats were Dave Culp lapstrake built, held together with wooden pegs or rivets. Specialist Correspondents Originally just a skin with ribs, and thwarts at “gunwale” level, th Aerodynamics—Tom Speer by the 9 century AD they had gained a “second layer” of ribs Electronics—David Jolly and upper planking, and the original thwarts served as beams Human & Solar Power—Theo Schmidt under the decks. Which brings us to the meginhufer. Hydrofoils—George Chapman I’m told this term literally means “the strong plank”, and is Instrumentation—Joddy Chapman applied to what was once the top strake of the “lower boat”. -

Reviewing Ascenders for Rope Access
Review of the use of ascenders in rope access. Ascenders are being used extensively in rope access. However. As with anything else, there is a tendency to accept and establish practices even though new knowledge, techniques and tools may have changed over time. Sometimes it might be worth going back to investigate the evidence and the scientific background for the established practices. This is an attempt at that, regarding our use of ascenders. Two basically different constructions: To start with it is important to understand, that there are vital differences in the construction and subsequently in the use of the Petzl Croll/new Petzl Basic and the Petzl Ascension/old Petzl Basic, as it is also outlined by the manufacturer. Old and new Petzl Basic. The primary difference lies with the construction of the two tools. In the Ascension/old Basic, there are two holes at the top of the tool on opposing sides of the rope channel, allowing a carabiner to be placed there, thus strengthening the construction and at the same time keeping the rope in place in the rope channel, even when the ascender is being used in a non vertical position. In the User Manual for the Petzl Croll (B16) and for the (new) Petzl Basic (B18), the manufacturer clearly warns against using them on non-vertical ropes due to the risk of the rope unclipping itself: Ascenders for rope access use. A review. 1 of 6. © ScanRope, 2014. www.scanrope.eu In the User Manual for the Petzl Ascension (and old Petzl Basic), however, it says, that..: ”The ASCENSION and BASIC ascenders are designed to be loaded in a direction parallel to the rope; if loaded at an angle to the rope, the cam may not correctly engage the rope and slippage can occur (See the technical notice, diagram 2). -

NS14 ASSOCIATION NATIONAL BOAT REGISTER Sail No. Hull
NS14 ASSOCIATION NATIONAL BOAT REGISTER Boat Current Previous Previous Previous Previous Previous Original Sail No. Hull Type Name Owner Club State Status MG Name Owner Club Name Owner Club Name Owner Club Name Owner Club Name Owner Club Name Owner Allocated Measured Sails 2070 Midnight Midnight Hour Monty Lang NSC NSW Raced Midnight Hour Bernard Parker CSC Midnight Hour Bernard Parker 4/03/2019 1/03/2019 Barracouta 2069 Midnight Under The Influence Bernard Parker CSC NSW Raced 434 Under The Influence Bernard Parker 4/03/2019 10/01/2019 Short 2068 Midnight Smashed Bernard Parker CSC NSW Raced 436 Smashed Bernard Parker 4/03/2019 10/01/2019 Short 2067 Tiger Barra Neil Tasker CSC NSW Raced 444 Barra Neil Tasker 13/12/2018 24/10/2018 Barracouta 2066 Tequila 99 Dire Straits David Bedding GSC NSW Raced 338 Dire Straits (ex Xanadu) David Bedding 28/07/2018 Barracouta 2065 Moondance Cat In The Hat Frans Bienfeldt CHYC NSW Raced 435 Cat In The Hat Frans Bienfeldt 27/02/2018 27/02/2018 Mid Coast 2064 Tiger Nth Degree Peter Rivers GSC NSW Raced 416 Nth Degree Peter Rivers 13/12/2017 2/11/2013 Herrick/Mid Coast 2063 Tiger Lambordinghy Mark Bieder PHOSC NSW Raced Lambordinghy Mark Bieder 6/06/2017 16/08/2017 Barracouta 2062 Tiger Risky Too NSW Raced Ross Hansen GSC NSW Ask Siri Ian Ritchie BYRA Ask Siri Ian Ritchie 31/12/2016 Barracouta 2061 Tiger Viva La Vida Darren Eggins MPYC TAS Raced Rosie Richard Reatti BYRA Richard Reatti 13/12/2016 Truflo 2060 Tiger Skinny Love Alexis Poole BSYC SA Raced Skinny Love Alexis Poole 15/11/2016 20/11/2016 Barracouta -

Bowline Tests
Boutique Bowlines International Technical Rescue Symposium Albuquerque, NM 2019 Kelly M Byrne Rescue 2 Training [email protected] The purpose of this paper is to document the research conducted in looking at various bowlines and their breaking strengths, as well as their susceptibility to cycling loading This was done in order to have a reference as to whether a bowline is suitable for an end line rescue knot as well as an anchor. Having initially learned the bowline as a great knot as a Cub Scout, told of the tremendous dangers of using it in any rope carried by the fire department, and finally heard it praises sung as I got further into rope rescue; I was understandably confused as to what the correct answer was. This was especially true when it comes to bowlines that weren’t your straight ahead “rabbit comes out of the hole” bowline. Boutique Bowlines, if you will. There was no data that I was able to find to suggest that these Boutique Bowlines were suitable for rescue work. Just a collection of anecdotal evidence. Defining a Bowline According to some members of the International Guild of Knot Tyers there are over 120 (!!) different names for bowline knots currently known; with at least 55 distinct variations of the bowline knot as well as several bowline based bends. Most of us are probably familiar with the “standard bowline”, what Ashley’s Book of Knots, where each knot is assigned its own unique number, has listed as #1010. While it is indeed a bowline, it is not the bowline. -
Firestarters Summits of Desire Visionaries & Vandals
31465_Cover 12/2/02 9:59 am Page 2 ISSUE 25 - SPRING 2002 £2.50 Firestarters Choosing a Stove Summits of Desire International Year of Mountains FESTIVAL OF CLIMBING Visionaries & Vandals SKI-MOUNTAINEERING Grit Under Attack GUIDEBOOKS - THE FUTURE TUPLILAK • LEADERSHIP • METALLIC EQUIPMENT • NUTRITION FOREWORD... NEW SUMMITS s the new BMC Chief Officer, writing my first ever Summit Aforeword has been a strangely traumatic experience. After 5 years as BMC Access Officer - suddenly my head is on the block. Do I set out my vision for the future of the BMC or comment on the changing face of British climbing? Do I talk about the threats to the cliff and mountain envi- ronment and the challenges of new access legislation? How about the lessons learnt from foot and mouth disease or September 11th and the recent four fold hike in climbing wall insurance premiums? Big issues I’m sure you’ll agree - but for this edition I going to keep it simple and say a few words about the single most important thing which makes the BMC tick - volunteer involvement. Dave Turnbull - The new BMC Chief Officer Since its establishment in 1944 the BMC has relied heavily on volunteers and today the skills, experience and enthusi- District meetings spearheaded by John Horscroft and team asm that the many 100s of volunteers contribute to climb- are pointing the way forward on this front. These have turned ing and hill walking in the UK is immense. For years, stal- into real social occasions with lively debates on everything warts in the BMC’s guidebook team has churned out quality from bolts to birds, with attendances of up to 60 people guidebooks such as Chatsworth and On Peak Rock and the and lively slideshows to round off the evenings - long may BMC is firmly committed to getting this important Commit- they continue. -

Experience the Thrill of Heights
EXPERIENCE THE THRILL OF HEIGHTS The multi-way splitter is not for sale in the US. a brand of 2 Walltopia is the world leader in climbing walls manufacturing and active entertainment attractions with more than 1800 projects in over 70 countries. Our Active Entertainment product line evolved from our experience in the climbing wall industry and the natural human craving for play. We were driven by the desire to transform physical activity into amusing and purposeful play, suitable and entertaining for everyone, with no need of specific sport preparation and minimum equipment required for the participants. Providing versatile experience, in their core our products share one and the same goal. They help us get active and encourage us to spend more time with our family and friends in a meaningful, present way. That’s what we call active entertainment. 4 EXPERIENCE THE THRILL OF HEIGHTS Walltopia Ropes Courses challenge flexibility, balance and strength in a thrill-boosting way, while ensuring maximum safety in conjunction with eurocode safety standards. All our ropes courses offer a wide range of difficulty levels that appeal to both children and adults. The brand’s attractions are appropriate for participants as young as five years old. The multi-way splitter is not for sale in the US. OVERVIEW Key points MULTI-DEMOGRAPHIC APPEAL FLEXIBLE BUSINESS MODELS The difficulty of each obstacle can be Our courses accommodate linear tailored to preference or to specific per-ride or multi-directional hourly- age groups. ticketed operation models. OPERATION EFFICIENCY EASY INTEGRATION Highest manufacturing and safety Flexible designs & extensive theming standards ensure hassle-free operation options allow for easy integration while and low maintenance costs. -
Participant Guide
Participant Guide National High Adventure Sea Base, BSA Sea Base Scuba Programs Islamorada, Florida Scuba Adventure Scuba Certification Scuba Live Aboard Revised Date: 2.23.2021 Mission of the Boy Scouts of America The mission of the Boy Scouts of America is to prepare young people to make ethical and moral choices over their lifetime by instilling in them the values of the Scout Oath and Law. Scout Oath On my honor I will do my best to do my duty to God and my country and to obey the Scout Law; to help other people at all times; to keep myself physically strong, mentally awake, and morally straight. Scout Law A Scout is: Trustworthy. Loyal. Helpful. Friendly. Courteous. Kind. Obedient. Cheerful. Thrifty. Brave. Clean. Reverent. Mission Statement of Sea Base, BSA It is the mission of Sea Base to serve councils and units by providing an outstanding high adventure experience for older Boy Scouts, Varsity Scouts, Venturers, Sea Scouts and their leaders. Sea Base programs are designed to achieve the principal aims of the Boy Scouts of America: • To build character • To foster citizenship • To develop physical, mental, and emotional fitness Keys Blessing Bless the creatures of the Sea Bless this person I call me Bless the Keys, you make so grand Bless the sun that warms the land Bless the fellowship we feel As we gather for this meal Amen Page | 2 Table of Contents General Eligibility Requirements ................................................................................................................. 4 General Eligibility at a Glance -

Passive Protection Protection Passive Passive Sicherungen
A chaque fois que vous réformez une pièce de matériel, détruisez- „Verkeilt“ sich die Sicherung, ist die Gefahr geringer, dass sie FRANÇAIS la pour empêcher toute utilisation ultérieure. sich bei Seilzug lockert oder gar herausfällt. NOTICE D’UTILISATION ◆ Zum Entfernen eines Stopper oder Hex aus einem Riss benötigen STOPPERS ET HEXENTRICS D’OCCASION Sie eventuell ein Nut Tool. Vermeiden Sie es, das Kabel häufig North America: Black Diamond Equipment, Ltd. Nous déconseillons vivement l’utilisation de matériel d’occasion. stark zu verbiegen, da es hierbei übermässig belastet wird und 2084 East 3900 South Salt Lake City, UT 84124 AVERTISSEMENT Vous devez connaître les antécédents de votre matériel afin de schliesslich brechen kann. Phone: (801) 278-5533, Fax: (801) 278-5544 Pour l’escalade et l’alpinisme uniquement. pouvoir juger de sa fiabilité. Email: [email protected] L’escalade et l’alpinisme sont des activités EN 12270 : Les Stoppers, Micro Stoppers, Micro Stoppers Offset et Europe: Black Diamond Equipment AG ! Verwenden Sie zum Einhängen in das Kabel immer einen Hexentrics Black Diamond sont conformes à la norme européenne Christoph Merian Ring 7 4153 Reinach, Switzerland dangereuses. Vous devez comprendre et accepter Karabiner. Fädeln Sie niemals Gurtband oder Seil direkt durch EN 12270 relative à l’équipement d’alpinisme et d’escalade – Phone: +41/61 564 33 33, Fax: +41/61 564 33 34 les risques encourus avant de vous engager. Les ein Stopper- oder Hexentric-Kabel. Coinceurs – Exigences de sécurité et méthodes d’essai. Email: [email protected] mineurs et autres personnes dans l’incapacité ! Vermeiden Sie bei der Platzierung von Sicherungen, dass das Asia: Black Diamond Equipment Asia d’assumer cette responsabilité doivent pratiquer MARQUAGES Kabel bei Belastung über scharfe Kanten läuft.