RADIUS of CURVATURE and EVOLUTE of the FUNCTION Y=F(X)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 9 Optimization: One Choice Variable
RS - Ch 9 - Optimization: One Variable Chapter 9 Optimization: One Choice Variable 1 Léon Walras (1834-1910) Vilfredo Federico D. Pareto (1848–1923) 9.1 Optimum Values and Extreme Values • Goal vs. non-goal equilibrium • In the optimization process, we need to identify the objective function to optimize. • In the objective function the dependent variable represents the object of maximization or minimization Example: - Define profit function: = PQ − C(Q) - Objective: Maximize - Tool: Q 2 1 RS - Ch 9 - Optimization: One Variable 9.2 Relative Maximum and Minimum: First- Derivative Test Critical Value The critical value of x is the value x0 if f ′(x0)= 0. • A stationary value of y is f(x0). • A stationary point is the point with coordinates x0 and f(x0). • A stationary point is coordinate of the extremum. • Theorem (Weierstrass) Let f : S→R be a real-valued function defined on a compact (bounded and closed) set S ∈ Rn. If f is continuous on S, then f attains its maximum and minimum values on S. That is, there exists a point c1 and c2 such that f (c1) ≤ f (x) ≤ f (c2) ∀x ∈ S. 3 9.2 First-derivative test •The first-order condition (f.o.c.) or necessary condition for extrema is that f '(x*) = 0 and the value of f(x*) is: • A relative minimum if f '(x*) changes its sign y from negative to positive from the B immediate left of x0 to its immediate right. f '(x*)=0 (first derivative test of min.) x x* y • A relative maximum if the derivative f '(x) A f '(x*) = 0 changes its sign from positive to negative from the immediate left of the point x* to its immediate right. -

J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This Course Is an Introduction to the Geometry of Smooth Curves and Surf
J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This course is an introduction to the geometry of smooth if the velocity never vanishes). Then the speed is a (smooth) curves and surfaces in Euclidean space Rn (in particular for positive function of t. (The cusped curve β above is not regular n = 2; 3). The local shape of a curve or surface is described at t = 0; the other examples given are regular.) in terms of its curvatures. Many of the big theorems in the DE The lengthR [ : Länge] of a smooth curve α is defined as subject – such as the Gauss–Bonnet theorem, a highlight at the j j len(α) = I α˙(t) dt. (For a closed curve, of course, we should end of the semester – deal with integrals of curvature. Some integrate from 0 to T instead of over the whole real line.) For of these integrals are topological constants, unchanged under any subinterval [a; b] ⊂ I, we see that deformation of the original curve or surface. Z b Z b We will usually describe particular curves and surfaces jα˙(t)j dt ≥ α˙(t) dt = α(b) − α(a) : locally via parametrizations, rather than, say, as level sets. a a Whereas in algebraic geometry, the unit circle is typically be described as the level set x2 + y2 = 1, we might instead This simply means that the length of any curve is at least the parametrize it as (cos t; sin t). straight-line distance between its endpoints. Of course, by Euclidean space [DE: euklidischer Raum] The length of an arbitrary curve can be defined (following n we mean the vector space R 3 x = (x1;:::; xn), equipped Jordan) as its total variation: with with the standard inner product or scalar product [DE: P Xn Skalarproduktp ] ha; bi = a · b := aibi and its associated norm len(α):= TV(α):= sup α(ti) − α(ti−1) : jaj := ha; ai. -

Section 6: Second Derivative and Concavity Second Derivative and Concavity
Chapter 2 The Derivative Applied Calculus 122 Section 6: Second Derivative and Concavity Second Derivative and Concavity Graphically, a function is concave up if its graph is curved with the opening upward (a in the figure). Similarly, a function is concave down if its graph opens downward (b in the figure). This figure shows the concavity of a function at several points. Notice that a function can be concave up regardless of whether it is increasing or decreasing. For example, An Epidemic: Suppose an epidemic has started, and you, as a member of congress, must decide whether the current methods are effectively fighting the spread of the disease or whether more drastic measures and more money are needed. In the figure below, f(x) is the number of people who have the disease at time x, and two different situations are shown. In both (a) and (b), the number of people with the disease, f(now), and the rate at which new people are getting sick, f '(now), are the same. The difference in the two situations is the concavity of f, and that difference in concavity might have a big effect on your decision. In (a), f is concave down at "now", the slopes are decreasing, and it looks as if it’s tailing off. We can say “f is increasing at a decreasing rate.” It appears that the current methods are starting to bring the epidemic under control. In (b), f is concave up, the slopes are increasing, and it looks as if it will keep increasing faster and faster. -

Differential Geometry
Differential Geometry J.B. Cooper 1995 Inhaltsverzeichnis 1 CURVES AND SURFACES—INFORMAL DISCUSSION 2 1.1 Surfaces ................................ 13 2 CURVES IN THE PLANE 16 3 CURVES IN SPACE 29 4 CONSTRUCTION OF CURVES 35 5 SURFACES IN SPACE 41 6 DIFFERENTIABLEMANIFOLDS 59 6.1 Riemannmanifolds .......................... 69 1 1 CURVES AND SURFACES—INFORMAL DISCUSSION We begin with an informal discussion of curves and surfaces, concentrating on methods of describing them. We shall illustrate these with examples of classical curves and surfaces which, we hope, will give more content to the material of the following chapters. In these, we will bring a more rigorous approach. Curves in R2 are usually specified in one of two ways, the direct or parametric representation and the implicit representation. For example, straight lines have a direct representation as tx + (1 t)y : t R { − ∈ } i.e. as the range of the function φ : t tx + (1 t)y → − (here x and y are distinct points on the line) and an implicit representation: (ξ ,ξ ): aξ + bξ + c =0 { 1 2 1 2 } (where a2 + b2 = 0) as the zero set of the function f(ξ ,ξ )= aξ + bξ c. 1 2 1 2 − Similarly, the unit circle has a direct representation (cos t, sin t): t [0, 2π[ { ∈ } as the range of the function t (cos t, sin t) and an implicit representation x : 2 2 → 2 2 { ξ1 + ξ2 =1 as the set of zeros of the function f(x)= ξ1 + ξ2 1. We see from} these examples that the direct representation− displays the curve as the image of a suitable function from R (or a subset thereof, usually an in- terval) into two dimensional space, R2. -

Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-Space E3
Fundamentals of Contemporary Mathematical Sciences (2020) 1(2) 63 { 70 Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-space E3 Abdullah Yıldırım 1,∗ Feryat Kaya 2 1 Harran University, Faculty of Arts and Sciences, Department of Mathematics S¸anlıurfa, T¨urkiye 2 S¸ehit Abdulkadir O˘guzAnatolian Imam Hatip High School S¸anlıurfa, T¨urkiye, [email protected] Received: 29 February 2020 Accepted: 29 June 2020 Abstract: In this study, evolute-involute curves are researched. Characterization of evolute-involute curves lying on the surface are examined according to Darboux frame and some curves are obtained. Keywords: Curve, surface, geodesic, curvature, frame. 1. Introduction The interest of special curves has increased recently. Some of these are associated curves. They are curves where one of the Frenet vectors at opposite points is linearly dependent to the other curve. One of the best examples of these curves is the evolute-involute partner curves. An involute thought known to have been used in his optical work came up in 1658 by C. Huygens. C. Huygens discovered involute curves while trying to make more accurate measurement studies [5]. Many researches have been conducted about evolute-involute partner curves. Some of them conducted recently are Bilici and C¸alı¸skan [4], Ozyılmaz¨ and Yılmaz [9], As and Sarıo˘glugil[2]. Bekta¸sand Y¨uceconsider the notion of the involute-evolute curves lying on the surfaces for a special situation. They determine the special involute-evolute partner D−curves in E3: By using the Darboux frame of the curves they obtain the necessary and sufficient conditions between κg , ∗ − ∗ ∗ τg; κn and κn for a curve to be the special involute partner D curve. -

Concavity and Points of Inflection We Now Know How to Determine Where a Function Is Increasing Or Decreasing
Chapter 4 | Applications of Derivatives 401 4.17 3 Use the first derivative test to find all local extrema for f (x) = x − 1. Concavity and Points of Inflection We now know how to determine where a function is increasing or decreasing. However, there is another issue to consider regarding the shape of the graph of a function. If the graph curves, does it curve upward or curve downward? This notion is called the concavity of the function. Figure 4.34(a) shows a function f with a graph that curves upward. As x increases, the slope of the tangent line increases. Thus, since the derivative increases as x increases, f ′ is an increasing function. We say this function f is concave up. Figure 4.34(b) shows a function f that curves downward. As x increases, the slope of the tangent line decreases. Since the derivative decreases as x increases, f ′ is a decreasing function. We say this function f is concave down. Definition Let f be a function that is differentiable over an open interval I. If f ′ is increasing over I, we say f is concave up over I. If f ′ is decreasing over I, we say f is concave down over I. Figure 4.34 (a), (c) Since f ′ is increasing over the interval (a, b), we say f is concave up over (a, b). (b), (d) Since f ′ is decreasing over the interval (a, b), we say f is concave down over (a, b). 402 Chapter 4 | Applications of Derivatives In general, without having the graph of a function f , how can we determine its concavity? By definition, a function f is concave up if f ′ is increasing. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Computer-Aided Design and Kinematic Simulation of Huygens's
applied sciences Article Computer-Aided Design and Kinematic Simulation of Huygens’s Pendulum Clock Gloria Del Río-Cidoncha 1, José Ignacio Rojas-Sola 2,* and Francisco Javier González-Cabanes 3 1 Department of Engineering Graphics, University of Seville, 41092 Seville, Spain; [email protected] 2 Department of Engineering Graphics, Design, and Projects, University of Jaen, 23071 Jaen, Spain 3 University of Seville, 41092 Seville, Spain; [email protected] * Correspondence: [email protected]; Tel.: +34-953-212452 Received: 25 November 2019; Accepted: 9 January 2020; Published: 10 January 2020 Abstract: This article presents both the three-dimensional modelling of the isochronous pendulum clock and the simulation of its movement, as designed by the Dutch physicist, mathematician, and astronomer Christiaan Huygens, and published in 1673. This invention was chosen for this research not only due to the major technological advance that it represented as the first reliable meter of time, but also for its historical interest, since this timepiece embodied the theory of pendular movement enunciated by Huygens, which remains in force today. This 3D modelling is based on the information provided in the only plan of assembly found as an illustration in the book Horologium Oscillatorium, whereby each of its pieces has been sized and modelled, its final assembly has been carried out, and its operation has been correctly verified by means of CATIA V5 software. Likewise, the kinematic simulation of the pendulum has been carried out, following the approximation of the string by a simple chain of seven links as a composite pendulum. The results have demonstrated the exactitude of the clock. -
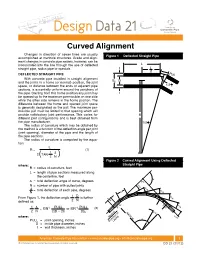
Design Data 21
Design Data 21 Curved Alignment Changes in direction of sewer lines are usually Figure 1 Deflected Straight Pipe accomplished at manhole structures. Grade and align- Figure 1 Deflected Straight Pipe ment changes in concrete pipe sewers, however, can be incorporated into the line through the use of deflected L straight pipe, radius pipe or specials. t L 2 DEFLECTED STRAIGHT PIPE Pull With concrete pipe installed in straight alignment Bc D and the joints in a home (or normal) position, the joint ∆ space, or distance between the ends of adjacent pipe 1/2 N sections, is essentially uniform around the periphery of the pipe. Starting from this home position any joint may t be opened up to the maximum permissible on one side while the other side remains in the home position. The difference between the home and opened joint space is generally designated as the pull. The maximum per- missible pull must be limited to that opening which will provide satisfactory joint performance. This varies for R different joint configurations and is best obtained from the pipe manufacturer. ∆ 1/2 N The radius of curvature which may be obtained by this method is a function of the deflection angle per joint (joint opening), diameter of the pipe and the length of the pipe sections. The radius of curvature is computed by the equa- tion: L R = (1) 1 ∆ 2 TAN ( 2 N ) Figure 2 Curved Alignment Using Deflected Figure 2 Curved Alignment Using Deflected where: Straight Pipe R = radius of curvature, feet Straight Pipe L = length of pipe sections measured along the centerline, feet ∆ ∆ = total deflection angle of curve, degrees P.I. -

Chapter 8 Optimal Points
Samenvatting Essential Mathematics for Economics Analysis 14-15 Chapter 8 Optimal Points Extreme points The extreme points of a function are where it reaches its largest and its smallest values, the maximum and minimum points. Formally, • is the maximum point for for all • is the minimum point for for all Where the derivative of the function equals zero, , the point x is called a stationary point or critical point . For some point to be the maximum or minimum of a function, it has to be such a stationary point. This is called the first-order condition . It is a necessary condition for a differentiable function to have a maximum of minimum at a point in its domain. Stationary points can be local or global maxima or minima, or an inflection point. We can find the nature of stationary points by using the first derivative. The following logic should hold: • If for and for , then is the maximum point for . • If for and for , then is the minimum point for . Is a function concave on a certain interval I, then the stationary point in this interval is a maximum point for the function. When it is a convex function, the stationary point is a minimum. Economic Applications Take the following example, when the price of a product is p, the revenue can be found by . What price maximizes the revenue? 1. Find the first derivative: 2. Set the first derivative equal to zero, , and solve for p. 3. The result is . Before we can conclude whether revenue is maximized at 2, we need to check whether 2 is indeed a maximum point. -

Concavity and Inflection Points. Extreme Values and the Second
Calculus 1 Lia Vas Concavity and Inflection Points. Extreme Values and The Second Derivative Test. Consider the following two increasing functions. While they are both increasing, their concavity distinguishes them. The first function is said to be concave up and the second to be concave down. More generally, a function is said to be concave up on an interval if the graph of the function is above the tangent at each point of the interval. A function is said to be concave down on an interval if the graph of the function is below the tangent at each point of the interval. Concave up Concave down In case of the two functions above, their concavity relates to the rate of the increase. While the first derivative of both functions is positive since both are increasing, the rate of the increase distinguishes them. The first function increases at an increasing rate (see how the tangents become steeper as x-values increase) because the slope of the tangent line becomes steeper and steeper as x values increase. So, the first derivative of the first function is increasing. Thus, the derivative of the first derivative, the second derivative is positive. Note that this function is concave up. The second function increases at an decreasing rate (see how it flattens towards the right end of the graph) so that the first derivative of the second function is decreasing because the slope of the 1 tangent line becomes less and less steep as x values increase. So, the derivative of the first derivative, second derivative is negative.