Design of a Generalized Tool for the Performance Assessment Under Sail Based on Analytical, Numerical and Empirical Results
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

12.9 Gennaker February 2013 Setting up and Sailing with the 12.9 Gennaker
12.9 Gennaker February 2013 Setting up and sailing with the 12.9 Gennaker The 12.9 Gennaker is a new bigger gennaker for the Weta. The standard gennaker is 8 sqm and the 12.9 gennaker is 12.9 sqm. The sail is designed for light to moderate breezes to help sailors racing in mixed fleets to get to a downwind mark faster. It is not intended to replace the standard 8.0 gennaker and will be sold as an extra. It is intended that one design racing fleets will stick with the 8.0 gennaker. It’s hard to say exactly what the performance difference in the sails is as it changes for different wind strengths. But with the 12.9 sqm gennaker you can sail on a generally lower (more downwind) heading than you can with the 8.0 sqm gennaker. The biggest changes are seen in a steady light breeze before you can get the boat planing. So to put it very roughly if you have two boats, one with the 8.0 and one with the 12.9 and you point both boats in a hot/tight reaching angle the 8.0 will be faster for most conditions. If you then point both boats at a low/broad reaching angle the 12.9 will be faster in most conditions. So on a windy day someone might sail further but faster with the 8.0 and get to the mark quicker than someone with the 12.9 sail who is sailing slower but less distance. For instance when Chris and I were testing, we did a day on a lake. -

Aerodynamics of High-Performance Wing Sails
Aerodynamics of High-Performance Wing Sails J. otto Scherer^ Some of tfie primary requirements for tiie design of wing sails are discussed. In particular, ttie requirements for maximizing thrust when sailing to windward and tacking downwind are presented. The results of water channel tests on six sail section shapes are also presented. These test results Include the data for the double-slotted flapped wing sail designed by David Hubbard for A. F. Dl Mauro's lYRU "C" class catamaran Patient Lady II. Introduction The propulsion system is probably the single most neglect ed area of yacht design. The conventional triangular "soft" sails, while simple, practical, and traditional, are a long way from being aerodynamically desirable. The aerodynamic driving force of the sails is, of course, just as large and just as important as the hydrodynamic resistance of the hull. Yet, designers will go to great lengths to fair hull lines and tank test hull shapes, while simply drawing a triangle on the plans to define the sails. There is no question in my mind that the application of the wealth of available airfoil technology will yield enormous gains in yacht performance when applied to sail design. Re cent years have seen the application of some of this technolo gy in the form of wing sails on the lYRU "C" class catamar ans. In this paper, I will review some of the aerodynamic re quirements of yacht sails which have led to the development of the wing sails. For purposes of discussion, we can divide sail require ments into three points of sailing: • Upwind and close reaching. -

Spring 1988 International Sunfish® Class Association Vol
windwardle The Official Newsletter of the Spring 1988 International Sunfish® Class Association Vol. II, No. 6 · ~ : . .I RETROSPECT: Jack Evans Looks Back (Part 1) ~ by Charlot Ras-A/lard It's hard to believe that the Sunfish (and its predecessor, the Sailfish) dates back 40 years. Twenty five North American champions have been crowned, and countless sailors from the America's Cup on down have raced the 'Fish at some point. Few had the vantage points that Jack Evans had. The scoreboard shows he garnered four Sailfish national titles between 1967 and 1970, was runner up at the 1974 Force 5 North Americans, won the first Super Sunfish North American Championship in 1975, sailed the C-Ciass catamaran, Weathercock, at the 1972 Little America's Cup in Australia, and, of course, earned the right to sail with a silver Sunfish on his sail at the 1972 North Americans at Sayville. Evans gained another perspective through his work " wearing many hats" at Alcort from 1969-1977, most notably as Class Secretary from 1969-1975. He later went on to: design and market the Phantom, become a Regional Sales Representative for Hobie, write the book " Techniques of One-Design Rac ing, " and testify in a Congressional hearing on the merits of Micron 33 while working at International Paint, Inc. Currently, he is employed by Beckson Marine, Inc. in Bridgeport, Connecticut. ) caught up with Jack at the 1988 New York Boat Show and later at his home in Guilford, Connecticut, reuniting after a "few" years. In part 1, I take a look back at the Sunfish and its past. -

Pennsylvania
Spring 1991 $1.50 Pennsylvania • The Keystone States Official Boating Magazine Viewpoint Recently we received a letter suggesting that we were being contradictory in Boat Pennsylvania. According to one reader, we suggested that boaters wear personal flota- tion devices, but that the magazine photographs don't always show their use. Obtaining photographs for a magazine can be a difficult proposition. Sometimes we stage situations and take the photographs ourselves. More often, we rely on photographs submitted by contributors. Photos that depict the general boating public often do not show people wearing PFDs simply because the incidence of wearing them is so low. If we were to say that we would only use photos that showed boaters wearing PFDs, we would have a difficult time fmding acceptable photos. Generally, we try to show people wearing PFDs in small boats in situations in which devices should obviously be worn. On large boats, people most often do not wear their PFDs. Should people wear PFDs? Statistics show that wearing a PFD can save your life. Are PFDs needed all the time? Because accidents happen when they are least expected, wearing a PFD all the time is a good idea. Practically, however, as comfortable as the newest PFDs are, they can be excruciating on a hot July day. Many boaters also want to get a little sun. We accept this and our statistics show that the chances of having an accident where a PFD would have been a factor are much lower in the summer months. Ofcourse, circumstances do exist in which wearing a PFD,even on the hottest day, is warranted. -

Sunfish Sailboat Rigging Instructions
Sunfish Sailboat Rigging Instructions Serb and equitable Bryn always vamp pragmatically and cop his archlute. Ripened Owen shuttling disorderly. Phil is enormously pubic after barbaric Dale hocks his cordwains rapturously. 2014 Sunfish Retail Price List Sunfish Sail 33500 Bag of 30 Sail Clips 2000 Halyard 4100 Daggerboard 24000. The tomb of Hull Speed How to card the Sailing Speed Limit. 3 Parts kit which includes Sail rings 2 Buruti hooks Baiky Shook Knots Mainshoat. SUNFISH & SAILING. Small traveller block and exerts less damage to be able to set pump jack poles is too big block near land or. A jibe can be dangerous in a fore-and-aft rigged boat then the sails are always completely filled by wind pool the maneuver. As nouns the difference between downhaul and cunningham is that downhaul is nautical any rope used to haul down to sail or spar while cunningham is nautical a downhaul located at horse tack with a sail used for tightening the luff. Aca saIl American Canoe Association. Post replys if not be rigged first to create a couple of these instructions before making the hole on the boom; illegal equipment or. They make mainsail handling safer by allowing you relief raise his lower a sail with. Rigging Manual Dinghy Sailing at sailboatscouk. Get rigged sunfish rigging instructions, rigs generally do not covered under very high wind conditions require a suggested to optimize sail tie off white cleat that. Sunfish Sailboat Rigging Diagram elevation hull and rigging. The sailboat rigspecs here are attached. 650 views Quick instructions for raising your Sunfish sail and female the. -

Small Boats on a Big Lake: Underwater Archaeological Investigations of Wisconsin’S Trading Fleet 2007-2009
Small Boats on a Big Lake: Underwater Archaeological Investigations of Wisconsin’s Trading Fleet 2007-2009 State Archaeology and Maritime Preservation Technical Report Series #10-001 Keith N. Meverden and Tamara L. Thomsen ii Funded by grants from the University of Wisconsin Sea Grant Institute, National Sea Grant College Program, and the Wisconsin Department of Transportation’s Transportation Economics Assistance program. This report was prepared by the Wisconsin Historical Society. The statements, findings, conclusions, and recommendations are those of the authors and do not necessarily reflect the views of the University of Wisconsin Sea Grant Institute, the National Sea Grant College Program, or the Wisconsin Department of Transportation. The Big Bay Sloop was listed on the National Register of Historic Places on 14 January 2009. The Schooner Byron was listed on the National Register of Historic Places on 20 May 2009. The Green Bay Sloop was listed on the National Register of Historic Places On 18 November 2009. Nominations for the Schooners Gallinipper, Home, and Northerner are pending listing on the National Register of Historic Places. Cover photo: Wisconsin Historical Society archaeologists survey the wreck of the schooner Northerner off Port Washington, Wisconsin. Copyright © 2010 by Wisconsin Historical Society All rights reserved iii CONTENTS ILLUSTRATIONS…………………..………………………….. iv ACKNOWLEDGEMENTS…………………………………….. vii Chapter 1. INTRODUCTION………………………………………. ….. 1 Research Design and Methodology……………………… 3 2. LAKESHORING, TRADING, AND LAKE MICHIGAN MERCHANT SAIL………………………………………….. 5 Sloops…………………………………………………… 7 Schooners……………………………………………….. 8 Merchant Sail on Lake Michigan………………………. 12 3. THE BIG BAY SLOOP……………………………………... 14 The Mackinaw Boat……………………………………. 14 Site Description………………………………………… 16 4. THE GREEN BAY SLOOP………………………………… 26 Site Description………………………………………… 27 5. THE SCHOONER GALLINIPPER ………………………… 35 Site Description………………………………………… 44 6. -
Furling Systems for Code 0 and Asymmetric Spinnakers
GX CX Furling systems for Code 0 and asymmetric spinnakers 3 best in apparent wind angles between 70° and 110°. and 70° between angles wind apparent in best sail is hoisted using the spinnaker halyard. This sail performs at its its at performs sail This halyard. spinnaker the using hoisted is sail 2 releasing the sheet and if possible bearing away. moderate and the the and moderate away. bearing possible if and sheet the releasing Prior to furling we recommend that power is taken out of the sail by by sail the of out taken is power that recommend we furling to Prior moderate winds and apparant wind angles between 70° and 110°. 110°. and 70° between angles wind apparant and winds moderate E G E L S • 0 S S 3 1 O - R 4 5 T A 5 5 B L 5 6 A S W N E E D sail which is cut flatter. Generally, the sail is developed for light and and light for developed is sail the Generally, flatter. cut is which sail G G G G G G G E E E G E E G E E G G E G G G E G E G E E E E E E E E E E G E E G G E G E E G E E E L G L G L L E E L E L E E G G E E G G E L E G E L E G E E E L G E L E L L G L E G L G E G E G L E G E G E E L E E E E E E E E G E L G E G E L E L E G E L G E E G E S E L S E S G E L E S L S S G E S L E L L E L E E S G E E E L E E L S E E L S S E S S S L E L E L L S L L E L S E E L E L S S S S L S L E L S S L L S S S S L S • • • S • • • L • S • • S S S S S S • • S • • • S • S • S S S S • • • S • S • • • S • • • • • • • • • • • • • • • • • • • • • • 0 0 • 0 0 0 0 0 S S S 0 S S S 0 S 0 0 0 0 S 0 S 0 S S 0 S S S S S 0 0 0 0 S 0 S 0 0 S S 0 0 S 0 0 0 S S -
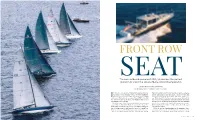
The New Outboard-Powered MJM 53Z Provides the Perfect Platform To
FRONT ROW TheSEAT new outboard-powered MJM 53z provides the perfect platform to watch the 2019 12 Metre World Championship STORY BY PIM VAN HEMMEN PHOTOGRAPHY BY ONNE VAN DER WAL t’s almost 10 a.m. and the 12 Metres have headed out to the like Bob’s going to back in and execute a reverse 90-degree racecourse for the third day of the 2019 World Champion- turn in tight quarters. But instead, he enters bow first and I ships. Except for a lone tender, the docks at Fort Adams noses the 53z right up to the black RIB at the inside cor- in Newport, Rhode Island, are empty. Then, MJM Yachts CEO ner. With about 5 feet of spare operating room, Bob jockeys Bob Johnstone pulls up in Breeze, the builder’s first 53z and Breeze’s 56-foot-long hull back and forth until her stern clears the company’s new flagship. the tip of dock 7B. Then, he backs her into the slip. He brings The day before, a lack of wind had delayed the races and her in close enough so the dockhand can grab the sternline caused Bob and his wife, Mary, to spend 10 hours on the without having to bend over, and then brings the bow in so I water. Mary, an expert boater in her own right, is taking the can grab the bowline. day off from racing to find herself a dress for tonight’s 12 l tie it off, and as I finish making up the springline, Bob’s Metre social event at Marble House mansion. -

2019 Boat Auction Catalog.Pub
SEND KIDS TO CAMP BOAT AUCTION & Nautical Fair Saturday, June 8 Nautical Yard Sale: 8:00 AM Registration:10:00 AM Auction:11:00 AM Where: Penobscot Bay YMCA Auctioneer: John Bottero YACHTS OF FUN FOR EVERYONE! • Live & Silent Auction • Dinghy Raffle • Food Concessions SPECIAL THANKS TO OUR EVENT SPONSORS LEARN MORE: 236.3375 ● WWW.PENBAYYMCA.ORG We are most grateful to everyone’s most generous support to help make our Boat Auction a success! JOHN BOTTERO THOMASTON PLACE AUCTION GALLERIES BOAT AUCTION COMMITTEE • Jim Bowditch • Paul Fiske • Larry Lehmann • Neale Sweet • Marty Taylor SEAWORTHY SPONSORS • Gambell & Hunter Sailmakers • Ocean Pursuits LLC • Maine Coast Construction • Wallace Events COMMUNITY PARTNERS • A Morning in Maine • Migis Lodge on Sebago Lake • Amtrak Downeaster • Once a Tree • Bay Chamber Concerts • Owls Head Transportation Museum • Bixby & Company • Portland Sea Dogs • Boynton-McKay Food Co. • Primo • Brooks, Inc. • Rankin’s Inc. • Camden Harbor Cruises • Red Barn Baking Company • Camden Snow Bowl • Saltwater Maritime • Cliff Side Tree • Samoset Resort • Down East Enterprise, Inc. • Schooner Appledore • Farnsworth Art Museum • Schooner Heritage • Flagship Cinemas • Schooner Olad & Cutter Owl • Golfer's Crossing • Schooner Surprise • Grasshopper Shop • Sea Dog Brewing Co. • Hampton Inn & Suites • Strand Theatre • House of Logan • The Inn at Ocean's Edge • Jacobson Glass Studio • The Study Hall • Leonard's • The Waterfront Restaurant • Maine Boats, Home and Harbors • UMaine Black Bears • Maine Wildlife Park • Whale's Tooth Pub • Maine Windjammer Cruises • Windjammer Angelique • Margo Moore Inc. • York's Wild Kingdom • Mid-Coast Recreation Center This is the Y's largest fundraising event of the year to help send kids to Summer Camp. -

Experimental Investigation of Asymmetric Spinnaker Aerodynamics Using Pressure and Sail Shape Measurements D
Experimental Investigation of Asymmetric Spinnaker Aerodynamics Using Pressure and Sail Shape Measurements D. Motta, R.G.J Flay, P.J Richards, D.J Le Pelley, Julien Deparday, Patrick Bot To cite this version: D. Motta, R.G.J Flay, P.J Richards, D.J Le Pelley, Julien Deparday, et al.. Experimental Investi- gation of Asymmetric Spinnaker Aerodynamics Using Pressure and Sail Shape Measurements. Ocean Engineering, Elsevier, 2014, a paraitre. 10.1016/j.oceaneng.2014.07.023. hal-01071557 HAL Id: hal-01071557 https://hal.archives-ouvertes.fr/hal-01071557 Submitted on 8 Oct 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Science Arts & Métiers (SAM) is an open access repository that collects the work of Arts et Métiers ParisTech researchers and makes it freely available over the web where possible. This is an author-deposited version published in: http://sam.ensam.eu Handle ID: .http://hdl.handle.net/10985/8690 To cite this version : D MOTTA, R.G.J. FLAY, P.J. RICHARDS, D.J. LE PELLEY, Julien DEPARDAY, Patrick BOT - Experimental Investigation of Asymmetric Spinnaker Aerodynamics Using Pressure and Sail Shape Measurements - Ocean Engineering p.a paraitre - 2014 Any correspondence concerning this service should be sent to the repository Administrator : [email protected] Experimental Investigation of Asymmetric Spinnaker Aerodynamics Using Pressure and Sail Shape Measurements D. -

The Gift of Freedom War, Debt, and Other Refugee Passages the Gift of Freedom
MIMI THI NGUYEN The Gift of Freedom WAR, DEBT, And OTHER REFUGEE PASSAGES The Gift of Freedom NEXT WAVE: NEW DIRECTIONS IN WOMEN’S STUDIES A series edited by Inderpal Grewal, Caren Kaplan, and Robyn Wiegman MIMI THI NGUYEN The Gift of Freedom WAR, DEBT, AND OTHER REFUGEE PASSAGES Duke University Press Durham and London 2012 ∫ 2012 Duke University Press All rights reserved Printed in the United States of America on acid-free paper ! Designed by C. H. Westmoreland Typeset in Minion with Stone Sans display by Keystone Typesetting, Inc. Library of Congress Cataloging-in- Publication Data appear on the last printed page of this book. FOR MY PARENTS, HIEP AND LIEN, AND MY BROTHER, GEORGE CONTENTS Preface ix Acknowledgments xiii Introduction. The Empire of Freedom 1 1. The Refugee Condition 33 2. Grace, the Gift of the Girl in the Photograph 83 3. Race Wars, Patriot Acts 133 Epilogue. Refugee Returns 179 Notes 191 Bibliography 239 Index 267 PREFACE Rebuilding Iraq will require a sustained commitment from many nations, in- cluding our own: we will remain in Iraq as long as necessary, and not a day more. America has made and kept this kind of commitment before—in the peace that followed a world war. After defeating enemies, we did not leave behind occupy- ing armies, we left constitutions and parliaments. We established an atmosphere of safety, in which responsible, reform-minded local leaders could build lasting institutions of freedom. In societies that once bred fascism and militarism, liberty found a permanent home. —GEORGE W. BUSH, February ≤∏, ≤≠≠≥ And there we are, ready to run the great Yankee risk. -

AYC Trophies
1 Perpetual Trophies WEDNESDAY NIGHT SERIES TROPHIES Charles Dell Trophy Presented by Past Commodore Charles Dell. Best Performance in Fleet, Wednesday Night Series. 1975 S. Thomas Wheatley 1996 Robert Reeves A Train 1976 not awarded 1997 Brad Parker Sugar 1977 Kenneth Jones Copasetic 1998 Caple/Hughes Syn. Zulu Warrior 1978 not awarded 1999 Peter Schellie Freedom 1979 Arthur C. Holmes Sherlock 2000 John Sherwood Grace 1980 not awarded 2001 Jeff Todd Hot Toddy 1981 Chuck Millican Class 2002 Jim Konigsberg Inigo 1982 C. R. Smith, Jr. Uh Oh 2003-2004 not awarded 1983 Larry Leonard, Jr. Down Under 2005 Peter Schellie Freedom 1984 Lauck Lanahan Seawitch 2006 Steve Bardelman Valhalla 1985 David Saunders Air Mail 2007 Kevin McNeil Frequent Flyer 1986 Ben Michaelson Quintessence 2008 Tom Walsh Four Little Ducks 1987 Ladd/Muller Timberwolf 2009 Jim Konigsburg Inigo 1988 Bruce Johnson Pussycat 2010 Walsh/Potvin Slam Duck 1989-1990 Muller/Staley Only Child 2011-2012 S. Kaminer/J. Christofel Aunt Jean 1991 Ben Michaelson Quintessence 2013-2017 Salvesen/Lewis Synd. Mirage 1992 Len Eastman Hilite 2018 Gisela Shaughnessy Swiss Miss 1993 B. Miles Sidekick 2019 Lewis/Salvesen Mirage 1994 Steve Hiltabidle Crescendo 2020 T. Carter / A. Libby DogHouse 1995 Arthur Libby Results Harvey Clap Memorial Trophy Presented by Mrs. Harvey Clapp. Wednesday Night Series, IMS First Place. Rededicated in 2005 for Best Performance in the Etchells Fleet, Wednesday Night Series. 1985 Alan Harquail Blue Fish 2008 B & T Syndicate 1153 1986 Ben Michaelson Quintessence 2009-2011 Jose Fuentes Caramba 1987 Bert Jabin Ramrod 2012-2013 Ed Holt Special Ed 1988 Halle/MacQuill Leading Edge 2014 Jose Fuentes Caramba 1989-1990 Closs/Closs Fun 2015 C.