Elasto-Kinematics Design of an Innovative Composite Material Suspension System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tire Inflation Using Suspension (Tis)
TIRE INFLATION USING SUSPENSION (TIS) CH. Sai Phani Kumar CH. Bhanu Sai Teja G. Praveen Kumar Singaiah.G B.Tech (Mechanical B.Tech (Mechanical B.Tech (Mechanical Assistant Professor Engineering) Engineering) Engineering) Hyderabad Institute of Hyderabad Institute of Hyderabad Institute of Hyderabad Institute of Technology and Technology and Technology and Technology and Management, Management, Management, Management, Hyderabad, Hyderabad, Telangana. Hyderabad,Telangana. Hyderabad,Telangana. Telangana. Abstract are front-wheel-drive monologue/uni-body designs, In this project we are collecting compressed air from with transversely mounted engines. the vehicle shock absorber (which is a foot pump in this case) and storing the compressed air into the storage tank which holds the air without losing the pressure. This project combines the concepts of both conventional spring coil type suspension and air suspension, thereby introducing spring coil type Fig 1:Leaf spring, Coil spring, Air suspensions suspension with the working fluid as air instead of oil as in the case of conventional one. This concept Introduction to TIS functions both as a shock absorber and produces In addition to this technology, an advanced system is compressed air output during the course of interaction introduced into this phase called Tire Inflation using with road noise. The stored air can be used for various suspension (TIS). TIS are a system which is introduced applications such as to inflate the tires, cleaning to inflate the tires using vehicle suspension. The auxiliary components of vehicle etc.., our project deals system increases tire life, fuel economy and safety by with the usage of compressed air energy to inflate the helping to compensate for pressure losses resulting tires with required pressures. -
Hydrostatic Transaxle Replacement Kit 260 Series Yard and Garden Tractor Part No
Form No. 3325–913 Hydrostatic Transaxle Replacement Kit 260 Series Yard and Garden Tractor Part No. 105–1383 Parts Catalog Ordering Replacement Parts For example, a wheel assembly might be identified by To order replacement parts, please supply: the part reference number 6, the tire by 6:1, the valve by 6:2, number, the quantity, and the description of each and the wheel by 6:3. When you order the assembly part desired. identified by reference number 6, you receive all parts identified by reference numbers 6:1, 6:2, and 6:3. Understanding Reference Numbers However, you may also order any part individually. Each identified part in an illustration has a reference Reference numbers of this type appear in illustrations number. The reference number for a part also appears in and in part lists. the parts list, along with other information about the part. Reference Numbers Indicating Quantity This catalog uses two special reference number formats, one to indicate parts in a service assembly and another In an illustration, if a reference number indicates more to indicate the quantity of a given part in an illustration. than one part, the reference number has the form nX y. The n represents the quantity of the part, the X is the Service Assembly Reference Numbers multiplication symbol, and the y represents the reference Parts in service assemblies have reference numbers in number. the form a:b. The a represents the reference number of For example, in an illustration, the reference number the entire service assembly and the b represents a 2X 37 means that two of the parts identified by reference sequential number unique to each part within the service number 37 are indicated. -

A Comparative Study of the Suspension for an Off-Road Vehicle
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 07 Issue: 05 | May 2020 www.irjet.net p-ISSN: 2395-0072 A Comparative study of the Suspension for an Off-Road Vehicle Sivadanus.S Department of Manufacturing Engineering, College of Engineering – Guindy, Chennai ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - Humans use different vehicles to travel in is set nothing can be adjusted or moved. This type of different terrains for comfort and ease of travel. An off-terrain suspension will not be considered in the scope of this project vehicle is generally used for rugged terrain and needs a largely due to its lack of adjustability. completely different dynamics in suspension comparison to an on-road vehicle. The aim of this project is to identify and Independent suspension systems provide more effective determine the parameters of vehicle dynamics with a proper functionality in traction and stability for off-roading study of suspension and to initiate a comparative study for an applications. Independent suspension systems provide flex off-road vehicle using different models. (the ability for one wheel to move vertically while still Key Words: Suspension, Vehicle Dynamics, Off-road allowing the other wheels to stay in contact with the Vehicle, Control arms, Camber surface). 1.INTRODUCTION There are many different versions and variations of independent suspensions, which include swing axle Suspension suspensions, transverse leaf spring suspensions, trailing and The role of a suspension system within a vehicle is to ensure semi-trailing suspensions, Macpherson strut suspensions, that contact between the tires and driving surface is and double wishbone suspensions. Control arms are used for continuously maintained. -

Modelling, Testing and Analysis of a Regenerative Hydraulic Shock Absorber System
energies Article Modelling, Testing and Analysis of a Regenerative Hydraulic Shock Absorber System Ruichen Wang *, Fengshou Gu, Robert Cattley and Andrew D. Ball School of Computing and Engineering, University of Huddersfield, Queensgate, Huddersfield HD1 3DH, UK; [email protected] (F.G.); [email protected] (R.C.); [email protected] (A.D.B.) * Correspondence: [email protected]; Tel.: +44-01484-473640 Academic Editor: Paul Stewart Received: 31 March 2016; Accepted: 12 May 2016; Published: 19 May 2016 Abstract: To improve vehicle fuel economy whilst enhancing road handling and ride comfort, power generating suspension systems have recently attracted increased attention in automotive engineering. This paper presents our study of a regenerative hydraulic shock absorber system which converts the oscillatory motion of a vehicle suspension into unidirectional rotary motion of a generator. Firstly a model which takes into account the influences of the dynamics of hydraulic flow, rotational motion and power regeneration is developed. Thereafter the model parameters of fluid bulk modulus, motor efficiencies, viscous friction torque, and voltage and torque constant coefficients are determined based on modelling and experimental studies of a prototype system. The model is then validated under different input excitations and load resistances, obtaining results which show good agreement between prediction and measurement. In particular, the system using piston-rod dimensions of 50–30 mm achieves recoverable power of 260 W with an efficiency of around 40% under sinusoidal excitation of 1 Hz frequency and 25 mm amplitude when the accumulator capacity is set to 0.32 L with the load resistance 20 W. -

Roadmaster, Experts in Dinghy Towing, Introduces the Comfort Ride Slipper Leaf Spring and Shock Absorber Systems to Road-Weary Trailer and Fifth-Wheel Owners
article and photos by Bob Livingston SUSPENSION NIRVANA Roadmaster, experts in dinghy towing, introduces the Comfort Ride Slipper Leaf Spring and Shock Absorber systems to road-weary trailer and fifth-wheel owners railers and fifth-wheels take a lot of punishment a company immersed in the tow-bar business, catering on the road. Suspensions, designed to counter this to owners towing vehicles behind their motorhomes, has Tabuse, have not changed much over the years, and expanded its offerings in the towable arena with the intro- in most cases are the same ones found on chassis that date duction of the Comfort Ride Slipper Leaf Spring Suspension back a very long time. (The old line “This isn’t your grand- and Shock Absorber systems. father’s vehicle” does not apply.) While stock suspensions The concept is simple, and the result is a game changer hold the chassis off the ground, controlling the ride is not in the way trailers and fifth-wheels handle all road conditions. a strong attribute. One might ask, “Why worry about ride quality inside Leaf springs tied to shackles and a center-mounted a trailer when towing since no one is back there to feel equalizer are supposed to counter the bumps in the road the shakes, rattles and rolls? That’s a valid question, but but, with few exceptions, are not very effective. Roadmaster, subjecting a trailer to a constant 4.0-magnitude earthquake 74 TRAILER LIFE July 2018 Roadmaster’s Comfort Ride Slipper Leaf Spring and Shock Absorber systems bolt on to the frame with only minor drilling needed to mount the center box. -

Ride Control Defined
RIDE CONTROL DEFINED According to Newton's First Law, a moving body will continue moving in a straight line until it is acted upon by another force. Newton's Second Law states that for each action there is an equal and opposite reaction. In the case of the automobile, whether the disturbing force is in the form of a wind-gust, an incline in the roadway, or the cornering forces produced by tires, the force causing the action and the force resisting the action will always be in balance. Many things affect vehicles in motion. Weight distribution, speed, road conditions and wind are some factors that affect how vehicles travel down the highway. Under all these variables however, the vehicle suspension system including the shocks, struts and springs must be in good condition. Worn suspension components may reduce the stability of the vehicle and reduce driver control. They may also accelerate wear on other suspension components. Replacing worn or inadequate shocks and struts will help maintain good ride control as they: Control spring and suspension movement Provide consistent handling and braking Prevent premature tire wear Help keep the tires in contact with the road Maintain dynamic wheel alignment Control vehicle bounce, roll, sway, dive and acceleration squat Reduce wear on other vehicle systems Promote even and balanced tire and brake wear Reduce driver fatigue Suspension concepts and components have changed and will continue to change dramatically, but the basic objective remains the same: 1. Provide steering stability with good handling characteristics 2. Maximize passenger comfort Achieving these objectives under all variables of a vehicle in motion is called ride control 1 BASIC TERMINOLOGY To begin this training program, you need to possess some very basic information. -

2017 Rancho Stabilizers Secure.Pdf
RANCHO® TECHNICAL ASSISTANCE H LIN EC E T 1- 73 4 4-384-780 Monday - Friday: 8:30 to 5:30 EST If you have inquiries pertaining to Rancho® products, first verify your application and correct part numbers in the catalog. Read all instruction sheets and Rancho® supplements Press (1) for catalog and technical assistance: packed with your product. Before calling one • Rancho® Part Number Listings of our Team Rancho® Technicians, please have ® • NEW Rancho Product Updates the following information ready for a speedy ® • Explanation of Rancho products benefits and features response to your questions: • Correct Product Usage • Name of caller and business • Installation Assistance • Year/Make/Model and any Press (2) for Warranty Assistance: modifications to the vehicle • Product name and part numbers • Description of problem RANCHO DEALER LOCATOR visit www.gorancho.com/dealer_locator.php .2 RANCHO ® NORTH AMERICAN WARRANTY/RIDE GUARANTEE Tenneco warrants qualifying Rancho® products against defects in materials or workmanship (except finish) when used under normal operating conditions for as long as the products are installed on, and the original purchaser owns, the original vehicle on which they were installed. PRODUCT DESCRIPTION LIMITED 90-DAY ONE 90-DAY LIFETIME RIDE OFFER YEAR WARRANTY RS9000™XL Shock Absorber RS999000 Series b b RS999700 Series b b RS999800 Series b b Extended Travel RS9000™XL b quickLIFT™ LOADED RS999900 Series b b RS7000®MT Shock Absorber RS7000 Series b b RS5000™X Shock Absorber RS55000 Series b b RS5000™ Shock Absorber RS5000 Series b RS5600 Series b RS5700 Series b RS5800 Series b Excludes RS5000 Race Shocks STEERING STABILIZERS RS5400 Series b RS7000 Series b RS97000 Series b RS98000 Series b RockGear™ Bumpers b Doors b Differential Covers b Underbody Protection b Exterior Protection b LIGHT TRUCK b SUSPENSION COMPONENTS Information regarding Rancho’s warranty policy can be found on-line at www.gorancho.com or by contacting: Warranty Department/Tenneco One International Dr. -

Influence of Shock Absorber Temperature on Vehicle Ride Comfort and Road Holding
MATEC Web of Conferences 133, 02006 (2017) DOI: 10.1051/matecconf/201713302006 BulTrans-2017 Influence of shock absorber temperature on vehicle ride comfort and road holding Nikolay Pavlov1,* 1Technical University – Sofia, Faculty of Transport, 8 Kliment Ohridski Blvd., 1000 Sofia, Bulgaria Abstract. In this work shock absorber damping characteristics at different temperature conditions are determined. The variation of damping properties of the shock absorber depending on the temperature is given. An assessment of ride comfort and road holding characteristics for different temperatures is made. 1 Introduction Vehicle dynamic behaviour, ride comfort and tire-road contact are important parts of the design, construction and testing of a vehicle. Research in these areas of automotive engineering has been carried out by many authors in recent years. Some of the most comprehensive books and monographs are [1-4], and the main results and models described by their authors have been taken into account and used in this research work. Shock absorbers heat load and oil temperature are studied in the literature [5-7]. There are no studies how shock absorber temperatures directly influence the vehicle ride comfort. The conditions under which the vehicles are operated depend mainly on Fig. 1. Mineral oil viscosity relative to its room-temperature four factors: vehicle load, road irregularities character, viscosity for two types of oil (temperature viscosity sensitivity vehicle speed and ambient temperature [8]. Oscillations coefficient C = 2000 and 3000 K) [9]. of varying frequency and amplitude occur under these various conditions. For most cars, manufacturers set up After hard damping work of the shock absorbers, non-adjustable shock absorbers for good roads, average resistive forces gradually decrease due to oil heating and load (70-80 % of max.), normal speed (moderate) and reduced viscosity, but reaching optimum operating ambient temperature of 20 °C (corresponding to standard temperature is either too slow or not possible at all and atmospheric conditions). -

Rear Axle and Suspension Consists of Peri- 17 Odic General Inspection, Checking Tightness of Fasteners, and Axle Lubrication Fluid Level Check And/Or Replacement
REAR AXLE & SUSPENSION Overview The Blue Bird Vision Propane is equipped with either a conventional leaf spring/ hydraulic shock absorber rear suspension; or an optional Hendrickson Comfort Air rear air suspension. In both cases, the rear axle assembly is an Arvin Meritor model RS-21-145. Whether the bus is equipped with air or hydraulic brakes, wheel hubs and brake drums or rotors are mounted similarly. The wheel hub (with either an attached drum or rotor) is mounted upon to the axle spindles. Axle shafts pass through the center of the spindles and bolt to the outer flange of the wheel hub. Thus, the rear wheel 187 bearings are lubricated by the axle oil. This chapter describes the procedure for removal of the axle and suspension from the bus chassis. Manufacturer’s documentation is provided in the appendixes and on the TechReference CD for more involved servicing of the axle and suspenion components. [CAUTION] Towing the bus with the rear wheels on the road requires removal of the rear axle shafts in order to avoid potential damageto the automatic transmission. See Jacking & Towing in the Specs & Maintenance chapter for the required procedure. Appendixes In This Chapter Appendix 1. Comfort Air Rear Suspension. Hendrickson Technical Procedure num- ber 17730-246 covers maintenance, disassembly, and troubleshooting for the Com- fort Air rear suspension. Single Reduction Rear Differential Carriers On The TechReference CD Meritor Publication Maintenance Manual 5A Rear Axle. Arvin Meritor Maintenance Manual 5A includes thorough servicing infor- mation on the disassembly, inspection, and servicing of the rear axles, differential, and reduction gears. -

Suspension System, the Stabilizer Bar Should Be Applied to the System in Order to Make a Balance the Vehicle
0000-00 08-3 1. SPECIFICATION System Description Specification Front Suspension type Macperson strut type suspension Spring type Coil spring Stabilizer type Torsion bar type Shock absorber Type Cylindrical reciprocation type Max. length (extended) 554 mm Min. length 372 mm (compressed) Min. length Inner diameter (A) Upper: 84.0 mm (compressed) Lower: 100.0 mm Outer diameter (B) 163.1 mm Free length (C) 356.1 mm Installed length (D) 276.0 mm Coil windings 5.32 turns Winding direction Right direction Rear Driving type AWD 2WD suspension Suspension type (trailing, upper, lower & track Multi-link type ← rod) Spring type Coil spring ← Stabilizer type Torsion bar type ← Shock absorber Type Cylindrical ← reciprocation type Max. length (extended) 551 mm ← Min. length 361 mm ← (compressed) Coil spring Diameter (A) 12.8 mm 12.6 mm Free length (B) 287.1 mm 291.7 mm Coil windings 6.64 turns 6.32 Winding direction Right direction ← 08-4 1) Wheel Alignment System Description Specification Front Ground clearance (A) 76.8 ± 5 mm Trim height : wheel 433 mm center ↔ Wheel house Camber -0.15 ± 0.5˚ (maintenance free) Caster (maintenance 4.8 ± 0.5˚ free) Total toe-in 0.0 ± 0.1˚ (adjust by tie rod) King pin angle 12.85˚ Rear Ground clearance (A) 63.3 ± 5 mm Trim height : wheel 437 mm center ↔ Wheel house Camber -0.5 ± 0.5˚ (maintenance free) [ adjust by cam bolt on upper arm ] Total toe-in 0.0 ± 0.1˚ [ adjust by cam bolt on track rod ] 0000-00 08-5 2. TIGHTENING TORQUE ▶Front suspension assembly 08-6 ▶Rear suspension assembly 0000-00 08-7 1. -

Suspension Supplement Inboard Anti Roll
Suspension Supplement Inboard Anti Roll Bar Westfield Sportscars Ltd Unit One Gibbons Industrial Park Dudley Road Kingswinford West Midlands DY6 8XF www.westfield-sportscars.co.uk Tel: +44 (0) 1384 400077 Westfield Sportscars Elementary Build Manual Inboard Anti Roll Bar Fax: +44 (0) 1384 288781 Introduction This inboard anti roll bar assembly is designed to be used with semi-wide track front suspension. Note; It can only be fitted to vehicles with this suspension and not standard track suspension. For further information on wishbone specification please contact Westfield Sportscars. All text, images and photographs Copyright Westfield Sportscars Ltd 2007 - 2 - Westfield Sportscars Elementary Build Manual Inboard Anti Roll Bar Front Inboard Anti Roll Bar Parts First layout the items supplied in the kit and check the contents in conjunction with the list below. Item Location Tick Qty Req’d Stock code Description 1 L0008 1 3713045 ANTI ROLL BAR– FRT –2000S EPX 2 G0020 2 3719020 BELLCRANK-FRT BAR-2000S EPX 3 G0020 1 3719011 MTG BLOCK–FRT ROLL-2000S-RH 4 G0020 1 3719012 MTG BLOCK–FRT ROLL-2000S-LH 5 G0020 2 1416100 SPINDLE-ANTI ROLL BAR ROCKER 6 G0020 2 3719038 PUSH ROD-FRT ANTI ROLL - EPX 7 C0511 2 3715010 CLEVIS-ANTI ROLL BAR – FRT 8 C0000 2 4316046 ROD END BRG – FEMALE-5/16”UNF 9 E0303 6 4316005 ROD END BRG –MALE-5/16”UNF 10 C0501 12 1416025 BUSH-SHOULDERED A.R. BAR 11 C0607 2 7811147 7/16” x 3” UNF HEX HD BOLT 12 G0310 4 7811157 7/16” x 3 ¾” UNF HEX HD BOLT 13 G0306 6 7123006 M6x1.0 NYLOC P TYPE PP NUT 14 E0308 6 7133501 5/16” UNF HEX LOCK NUT 15 G0309 6 6853AU7 7/16” REPAIR WASHER 16 G0307 2 7133007 7/16” UNF NYLOC NUT 17 F0203 4 8111306 M6 x 30 HEX HD BOLT 18 G0306 2 8111356 M6 x 35 HEX HD BOLT 19 N0100 2 8165825 M8 x 25 CAP HD SCREW PLEASE NOTE – THE FITMENT OF THIS TYPE OF ROLLBAR WILL REQUIRE THE BATTERY TO BE FITTED ON THE TOP OF THE ALUMINIUM SCUTTLE PANEL. -
Shock Absorber RB Series
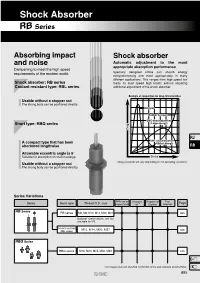
Shock Absorber RB Series Absorbing impact Shock absorber and noise Automatic adjustment to the most appropriate absorption performance Dampening to meet the high speed requirements of the modern world. Specially designed orifice can absorb energy comprehensively and most appropriately in many different applications. This ranges from high speed low Shock absorber: RB series loads, to load speed high loads; without requiring Coolant resistant type: RBL series additional adjustment of the shock absorber. Example of comparison for drag characteristics Usable without a stopper nut The strong body can be positioned directly. Dashpot Rubber bumper SMC shock absorber Short type: RBQ series (Large energy) Drag RJ SMC shock absorber A compact type that has been (Small energy) shortened lengthwise RB Allowable eccentric angle is 5° Suitable for absorption of rotation energy. Stroke Drag waveform will vary depending on the operating conditions. Usable without a stopper nut ∗ The strong body can be positioned directly. Series Variations Foot With cap or Hexagon Stopper nut Page Series Basic type Thread O.D. size bumper (Option) nut ∗ (Option) bracket RB Series RB series M6, M8, M10, M14, M20, M27 899 Optional specifications are not available for M6. Coolant resistant RBL series M10, M14, M20, M27 906 RBQ Series RBQ series M16, M20, M25, M30, M32 910 D- ∗ 2 Hexagon nuts are attached for the RB series and standard models RBQ. -X 895 Shock Absorber RB Series Technical Data: Model Selection Model Selection Step Selection Example 1. Type of impact Cylinder stroke at load (Horizontal) Cylinder stroke at load (Horizontal) Shock absorber Cylinder stroke at load (Downward) 1.