Collision Avoidance Operations in a Multi-Mission Environment
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Exhibits and Financial Statement Schedules 149
Table of Contents UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, D.C. 20549 FORM 10-K [ X] ANNUAL REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the fiscal year ended December 31, 2011 OR [ ] TRANSITION REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the transition period from to Commission File Number 1-16417 NUSTAR ENERGY L.P. (Exact name of registrant as specified in its charter) Delaware 74-2956831 (State or other jurisdiction of (I.R.S. Employer incorporation or organization) Identification No.) 2330 North Loop 1604 West 78248 San Antonio, Texas (Zip Code) (Address of principal executive offices) Registrant’s telephone number, including area code (210) 918-2000 Securities registered pursuant to Section 12(b) of the Act: Common units representing partnership interests listed on the New York Stock Exchange. Securities registered pursuant to 12(g) of the Act: None. Indicate by check mark if the registrant is a well-known seasoned issuer, as defined in Rule 405 of the Securities Act. Yes [X] No [ ] Indicate by check mark if the registrant is not required to file reports pursuant to Section 13 or Section 15(d) of the Act. Yes [ ] No [X] Indicate by check mark whether the registrant (1) has filed all reports required to be filed by Section 13 or 15(d) of the Securities Exchange Act of 1934 during the preceding 12 months (or for such shorter period that the registrant was required to file such reports), and (2) has been subject to such filing requirements for the past 90 days. -

A Quantitative Human Spacecraft Design Evaluation Model For
A QUANTITATIVE HUMAN SPACECRAFT DESIGN EVALUATION MODEL FOR ASSESSING CREW ACCOMMODATION AND UTILIZATION by CHRISTINE FANCHIANG B.S., Massachusetts Institute of Technology, 2007 M.S., University of Colorado Boulder, 2010 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirement for the degree of Doctor of Philosophy Department of Aerospace Engineering Sciences 2017 i This thesis entitled: A Quantitative Human Spacecraft Design Evaluation Model for Assessing Crew Accommodation and Utilization written by Christine Fanchiang has been approved for the Department of Aerospace Engineering Sciences Dr. David M. Klaus Dr. Jessica J. Marquez Dr. Nisar R. Ahmed Dr. Daniel J. Szafir Dr. Jennifer A. Mindock Dr. James A. Nabity Date: 13 March 2017 The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. ii Fanchiang, Christine (Ph.D., Aerospace Engineering Sciences) A Quantitative Human Spacecraft Design Evaluation Model for Assessing Crew Accommodation and Utilization Thesis directed by Professor David M. Klaus Crew performance, including both accommodation and utilization factors, is an integral part of every human spaceflight mission from commercial space tourism, to the demanding journey to Mars and beyond. Spacecraft were historically built by engineers and technologists trying to adapt the vehicle into cutting edge rocketry with the assumption that the astronauts could be trained and will adapt to the design. By and large, that is still the current state of the art. It is recognized, however, that poor human-machine design integration can lead to catastrophic and deadly mishaps. -

In-Flight PSF Calibration of the Nustar Hard X-Ray Optics
In-flight PSF calibration of the NuSTAR hard X-ray optics Hongjun Ana, Kristin K. Madsenb, Niels J. Westergaardc, Steven E. Boggsd, Finn E. Christensenc, William W. Craigd,e, Charles J. Haileyf, Fiona A. Harrisonb, Daniel K. Sterng, William W. Zhangh aDepartment of Physics, McGill University, Montreal, Quebec, H3A 2T8, Canada; bCahill Center for Astronomy and Astrophysics, California Institute of Technology, Pasadena, CA 91125, USA; cDTU Space, National Space Institute, Technical University of Denmark, Elektrovej 327, DK-2800 Lyngby, Denmark; dSpace Sciences Laboratory, University of California, Berkeley, CA 94720, USA; eLawrence Livermore National Laboratory, Livermore, CA 94550, USA; fColumbia Astrophysics Laboratory, Columbia University, New York NY 10027, USA; gJet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109, USA; hGoddard Space Flight Center, Greenbelt, MD 20771, USA ABSTRACT We present results of the point spread function (PSF) calibration of the hard X-ray optics of the Nuclear Spectroscopic Telescope Array (NuSTAR). Immediately post-launch, NuSTAR has observed bright point sources such as Cyg X-1, Vela X-1, and Her X-1 for the PSF calibration. We use the point source observations taken at several off-axis angles together with a ray-trace model to characterize the in-orbit angular response, and find that the ray-trace model alone does not fit the observed event distributions and applying empirical corrections to the ray-trace model improves the fit significantly. We describe the corrections applied to the ray-trace model and show that the uncertainties in the enclosed energy fraction (EEF) of the new PSF model is ∼<3% for extraction ′′ apertures of R ∼> 60 with no significant energy dependence. -
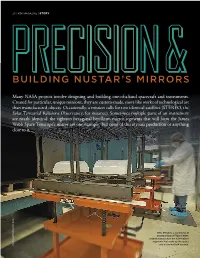
Building Nustar's Mirrors
20 | ASK MAGAZINE | STORY Title BY BUILDING NUSTAR’S MIRRORS Intro Many NASA projects involve designing and building one-of-a-kind spacecraft and instruments. Created for particular, unique missions, they are custom-made, more like works of technological art than manufactured objects. Occasionally, a mission calls for two identical satellites (STEREO, the Solar Terrestrial Relations Observatory, for instance). Sometimes multiple parts of an instrument are nearly identical: the eighteen hexagonal beryllium mirror segments that will form the James Webb Space Telescope’s mirror are one example. But none of this is mass production or anything close to it. nn GuisrCh/ASA N:tide CrothoP N:tide GuisrCh/ASA nn Niko Stergiou, a contractor at Goddard Space Flight Center, helped manufacture the 9,000 mirror segments that make up the optics unit in the NuSTAR mission. ASK MAGAZINE | 21 BY WILLIAM W. ZHANG The mirror segments my group has built for NuSTAR, the the interior surface and a bakeout, dries into a smooth and clean Nuclear Spectroscopic Telescope Array, are not mass produced surface, very much like glazed ceramic tiles. Finally we had to either, but we make them on a scale that may be unique at NASA: map the temperatures inside each oven to ensure they would we created more than 20,000 mirror segments over a period of two provide a uniform heating environment so the glass sheets years. In other words, we’re talking about some middle ground could slump in a controlled and gradual way. Any “wrinkles” between one-of-a-kind custom work and industrial production. -

NASA's STEREO Mission
NASA’s STEREO Mission J.B. Gurman STEREO Project Scientist W.T. Thompson STEREO Chief Observer Solar Physics Laboratory, Helophysics Division NASA Goddard Space Flight Center 1 The STEREO Mission • Science and technology definition team report, 1997 December: • Understand the origin and consequences of coronal mass ejections (CMEs) • Two spacecraft in earth-leading and -lagging orbits near 1 AU (Solar Terrestrial Probe line) • “Beacon” mode for near-realtime warning of potentially geoeffective events 2 Level 1 Requirements • Understand the causes and mechanisms of CME initiation • Characterize the propagation of CMEs through the heliosphere • Discover the mechanisms and sites of energetic particle acceleration in the low corona and the interplanetary medium • Develop a 3D, time-dependent model of the magnetic topology, temperature, density, and velocity structure of the ambient solar wind 3 Implementation • Two nearly identical spacecraft launched by a single ELV • Bottom spacecraft in stack has adapter ring, some strengthening • Spacecraft built at Johns Hopkins University APL • Four science investigations 4 Scientific Instruments • S/WAVES - broad frequency response RF detection of Type II, III bursts • PLASTIC - solar wind plasma and suprathermal ion composition measurements • IMPACT - energetic electrons and ions, magnetic field • SECCHI - EUV, coronagraphs and heliospheric imagers (surface to 1.5 AU) 5 Instrument Hardware • PLASTIC IMPACT boom IMPACT boom SECCHI SCIP SECCHI HI S/WAVES 6 Orbit Design • Science team selected a separation -
Nustar Observatory Guide
NuSTAR Guest Observer Program NuSTAR Observatory Guide Version 3.2 (June 2016) NuSTAR Science Operations Center, California Institute of Technology, Pasadena, CA NASA Goddard Spaceflight Center, Greenbelt, MD nustar.caltech.edu heasarc.gsfc.nasa.gov/docs/nustar/index.html i Revision History Revision Date Editor Comments D1,2,3 2014-08-01 NuSTAR SOC Initial draft 1.0 2014-08-15 NuSTAR GOF Release for AO-1 Addition of more information about CZT 2.0 2014-10-30 NuSTAR SOC detectors in section 3. 3.0 2015-09-24 NuSTAR SOC Update to section 4 for release of AO-2 Update for NuSTARDAS v1.6.0 release 3.1 2016-05-10 NuSTAR SOC (nusplitsc, Section 5) 3.2 2016-06-15 NuSTAR SOC Adjustment to section 9 ii Table of Contents Revision History ......................................................................................................................................................... ii 1. INTRODUCTION ................................................................................................................................................... 1 1.1 NuSTAR Program Organization ..................................................................................................................................................................................... 1 2. The NuSTAR observatory .................................................................................................................................... 2 2.1 NuSTAR Performance ........................................................................................................................................................................................................ -
The Explorer Program
The Explorer Program Presentation to the Astrophysics Subcommittee Wilton Sanders Explorer Program Scientist Astrophysics Division NASA Science Mission Directorate November 19, 2013 1 Astrophysics Explorer Program • The Astrophysics and the Heliophysics Explorer Programs are separate. • Current Astrophysics Explorer Missions: - Operating (and will be included in the 2014 Senior Review) • Swift (MIDEX), launched 2004 November 20 • Suzaku (MO – partnered with JAXA), launched 2005 July 10 • NuSTAR (SMEX), launched 2012 June 13 - In Development • ASTRO-H (MO – partnered with JAXA), scheduled for launch in 2015 - In Formulation • NICER (MO), targeted for transportation to ISS in 2016 • TESS (EX), targeted for launch in 2017 • Future AOs - SMEX and MO in late summer/early fall 2014 for launch ~ 2020 - EX and MO NET 2016 for launch ~ 2022 2 2014 Astrophysics Explorer AO • Community Announcement released on 2013 November 12 that NASA will solicit proposals for SMEX missions and Missions of Opportunity. • Draft AO targeted for spring 2014, with Explorer Workshop ~ 2 weeks later. • Final AO targeted for late summer/early fall 2014, with Pre-Proposal Conference ~ 3 weeks after final AO release. Proposals due 90 days after AO release. • PI cost cap $125M (FY2015$) for SMEX, not including cost of ELV or transportation to the ISS. • MOs allowed in all three categories: Partner MO, New Missions using Existing Spacecraft, or Small Complete Mission, including those requiring flight on the ISS. • PI cost cap $35M for sub-orbital class MOs, which include ultra-long duration balloons, suborbital reusable launch vehicles, and CubeSats. Other MOs (not suborbital-class) have a $65M PI cost cap. • Two-step process. -

Observational Artifacts of Nustar: Ghost-Rays and Stray-Light
Observational Artifacts of NuSTAR: Ghost-rays and Stray-light Kristin K. Madsena, Finn E. Christensenb, William W. Craigc, Karl W. Forstera, Brian W. Grefenstettea, Fiona A. Harrisona, Hiromasa Miyasakaa, and Vikram Ranaa aCalifornia Institute of Technology, 1200 E. California Blvd, Pasadena, USA bDTU Space, National Space Institute, Technical University of Denmark, Elektronvej 327, DK-2800 Lyngby, Denmark cSpace Sciences Laboratory, University of California, Berkeley, CA 94720, USA ABSTRACT The Nuclear Spectroscopic Telescope Array (NuSTAR), launched in June 2012, flies two conical approximation Wolter-I mirrors at the end of a 10.15 m mast. The optics are coated with multilayers of Pt/C and W/Si that operate from 3{80 keV. Since the optical path is not shrouded, aperture stops are used to limit the field of view from background and sources outside the field of view. However, there is still a sliver of sky (∼1.0{4.0◦) where photons may bypass the optics altogether and fall directly on the detector array. We term these photons Stray-light. Additionally, there are also photons that do not undergo the focused double reflections in the optics and we term these Ghost Rays. We present detailed analysis and characterization of these two components and discuss how they impact observations. Finally, we discuss how they could have been prevented and should be in future observatories. Keywords: NuSTAR, Optics, Satellite 1. INTRODUCTION 1 arXiv:1711.02719v1 [astro-ph.IM] 7 Nov 2017 The Nuclear Spectroscopic Telescope Array (NuSTAR), launched in June 2012, is a focusing X-ray observatory operating in the energy range 3{80 keV. -
Astrophysics
National Aeronautics and Space Administration Astrophysics Committee on NASA Science Paul Hertz Mission Extensions Director, Astrophysics Division NRC Keck Center Science Mission Directorate Washington DC @PHertzNASA February 1-2, 2016 Why Astrophysics? Astrophysics is humankind’s scientific endeavor to understand the universe and our place in it. 1. How did our universe 2. How did galaxies, stars, 3. Are We Alone? begin and evolve? and planets come to be? These national strategic drivers are enduring 1972 1982 1991 2001 2010 2 Astrophysics Driving Documents http://science.nasa.gov/astrophysics/documents 3 Astrophysics Programs Physics of the Cosmos Cosmic Origins Exoplanet Exploration Program Program Program 1. How did our universe 2. How did galaxies, stars, 3. Are We Alone? begin and evolve? and planets come to be? Astrophysics Explorers Program Astrophysics Research Program James Webb Space Telescope Program (managed outside of Astrophysics Division until commissioning) 4 Astrophysics Programs and Missions Physics of the Cosmos Cosmic Origins Exoplanet Exploration Program Program Program Chandra Hubble Spitzer Kepler/K2 XMM-Newton (ESA) Herschel (ESA) WFIRST Fermi SOFIA Planck (ESA) LISA Pathfinder (ESA) Astrophysics Explorers Program Euclid (ESA) NuSTAR Swift Suzaku (JAXA) Athena (ESA) ASTRO-H (JAXA) NICER TESS L3 GW Obs (ESA) 3 SMEX and 2 MO in Phase A James Webb Space Telescope Program: Webb 5 Astrophysics Programs and Missions Physics of the Cosmos Cosmic Origins Exoplanet Exploration Program Program Program Missions in extended phase Chandra Hubble Spitzer Kepler/K2 XMM-Newton (ESA) Herschel (ESA) WFIRST Fermi SOFIA Planck (ESA) LISA Pathfinder (ESA) Astrophysics Explorers Program Euclid (ESA) NuSTAR Swift Suzaku (JAXA) Athena (ESA) ASTRO-H (JAXA) NICER TESS L3 GW Obs (ESA) 3 SMEX and 2 MO in Phase A James Webb Space Telescope Program: Webb 6 Astrophysics Mission Portfolio • NASA Astrophysics seeks to advance NASA’s strategic objectives in astrophysics as well as the science priorities of the Decadal Survey in Astronomy and Astrophysics. -

The Deep Space Network - a Technology Case Study and What Improvements to the Deep Space Network Are Needed to Support Crewed Missions to Mars?
The Deep Space Network - A Technology Case Study and What Improvements to the Deep Space Network are Needed to Support Crewed Missions to Mars? A Master’s Thesis Presented to Department of Telecommunications State University of New York Polytechnic Institute Utica, New York In Partial Fulfillment of the Requirements for the Master of Science Degree By Prasad Falke May 2017 Abstract The purpose of this thesis research is to find out what experts and interested people think about Deep Space Network (DSN) technology for the crewed Mars mission in the future. The research document also addresses possible limitations which need to be fix before any critical missions. The paper discusses issues such as: data rate, hardware upgrade and new install requirement and a budget required for that, propagation delay, need of dedicated antenna support for the mission and security constraints. The Technology Case Study (TCS) and focused discussion help to know the possible solutions and what everyone things about the DSN technology. The public platforms like Quora, Reddit, StackExchange, and Facebook Mars Society group assisted in gathering technical answers from the experts and individuals interested in this research. iv Acknowledgements As the thesis research was challenging and based on the output of the experts and interested people in this field, I would like to express my gratitude and appreciation to all the participants. A special thanks go to Dr. Larry Hash for his guidance, encouragement, and support during the whole time. Additionally, I also want to thank my mother, Mrs. Mangala Falke for inspiring me always. Last but not the least, I appreciate the support from Maricopa County Emergency Communications Group (MCECG) and Arizona Near Space Research (ANSR) Organization for helping me to find the experts in space and communications field. -

Complete List of Contents
Complete List of Contents Volume 1 Cape Canaveral and the Kennedy Space Center ......213 Publisher’s Note ......................................................... vii Chandra X-Ray Observatory ....................................223 Introduction ................................................................. ix Clementine Mission to the Moon .............................229 Preface to the Third Edition ..................................... xiii Commercial Crewed vehicles ..................................235 Contributors ............................................................. xvii Compton Gamma Ray Observatory .........................240 List of Abbreviations ................................................. xxi Cooperation in Space: U.S. and Russian .................247 Complete List of Contents .................................... xxxiii Dawn Mission ..........................................................254 Deep Impact .............................................................259 Air Traffic Control Satellites ........................................1 Deep Space Network ................................................264 Amateur Radio Satellites .............................................6 Delta Launch Vehicles .............................................271 Ames Research Center ...............................................12 Dynamics Explorers .................................................279 Ansari X Prize ............................................................19 Early-Warning Satellites ..........................................284 -

Dsc Pub Edited
1968 93) few craters, much like the mare sites, Surveyor 7 although the general area was rougher. About Nation: U.S. (43) 21 hours after landing, ground controllers Objective(s): lunar soft-landing fired a pyrotechnic charge to drop the alpha- Spacecraft: Surveyor-G scattering instrument on the lunar surface. Spacecraft Mass: 1,040.1 kg When the instrument failed to move, con- Mission Design and Management: NASA JPL trollers used the robot arm to force it down. Launch Vehicle: Atlas-Centaur (AC-15 / Atlas The scoop on the arm was used numerous 3C no. 5903C / Centaur D-1A) times for picking up soil, digging trenches, Launch Date and Time: 7 January 1968 / and conducting at least sixteen surface- 06:30:00 UT bearing tests. Apart from taking 21,274 pho- Launch Site: ETR / launch complex 36A tographs (many of them in stereo), Surveyor Scientific Instruments: 7 also served as a target for Earth-based 1) imaging system lasers (of 1-watt power) to accurately 2) alpha-scattering instrument measure the distance between Earth and the 3) surface sampler Moon. Although it was successfully reacti- 4) footpad magnet vated after the lunar night, Surveyor 7 Results: Since Surveyors 1, 3, 5, and 6 success- finally shut down on 21 February 1968. In fully fulfilled requirements in support of total, the five successful Surveyors returned Apollo, NASA opted to use the last remaining more than 87,000 photos of the lunar surface Surveyor for a purely scientific mission out- and demonstrated the feasibility of soft- side of exploring a potential landing site for landing a spacecraft on the lunar surface.