Chapter 2 Components of a Personal Computer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
HANDOUT – Motherboard Components Objective 101.02
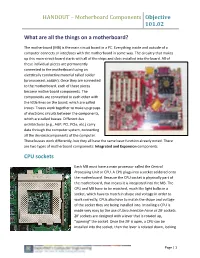
HANDOUT – Motherboard Components Objective 101.02 What are all the things on a motherboard? The motherboard (MB) is the main circuit board in a PC. Everything inside and outside of a computer connects or interfaces with the motherboard in some way. The circuitry that makes up this main circuit board starts with all of the chips and slots installed into the board. All of these individual pieces are permanently connected to the motherboard using an electrically conductive material called solder (pronounced: sodder). Once they are connected to the motherboard, each of these pieces become motherboard components. The components are connected to each other with the little lines on the board, which are called traces. Traces work together to make up groups of electronic circuits between the components, which are called busses. Different bus architectures (e.g., AGP, PCI, PCIe, etc.) carry data through the computer system, connecting all the devices/components of the computer. These busses work differently, but they all have the same basic function already noted. There are two types of motherboard components: Integrated and Expansion components. CPU sockets Each MB must have a main processor called the Central Processing Unit or CPU. A CPU plugs into a socket soldered onto the motherboard. Because the CPU socket is physically part of the motherboard, that means it is integrated into the MB. The CPU and MB have to be matched, much like light bulbs in a socket, which have to match in shape and voltage in order to work correctly, CPUs also have to match the shape and voltage of the socket they are being installed into. -

Thunder K8QSD Pro /// S4882UG2NR-D Revision 1.00
Thunder K8QSD Pro /// S4882UG2NR-D Revision 1.00 Copyright © TYAN Computer Corporation, 2005-2006. All rights reserved. No part of this manual may be reproduced or translated without prior written consent from TYAN Computer Corp. All registered and unregistered trademarks and company names contained in this manual are property of their respective owners including, but not limited to the following. TYAN, Thunder K8QSD Pro are trademarks of TYAN Computer Corporation. AMD, Opteron, and combinations thereof are trademarks of AMD Corporation. Phoenix BIOS is a trademark of Phoenix Technologies. Microsoft, Windows are trademarks of Microsoft Corporation. SuSE, is a trademark of SuSE AG. Linux is a trademark of Linus Torvalds IBM, PC, AT, and PS/2 are trademarks of IBM Corporation. Winbond is a trademark of Winbond Electronics Corporation. Broadcom® is a trademark of Broadcom Corporation and/or its subsidiaries ATI and Rage XL are trademarks of ATI Corporation TM LSI Logic, Fusion MPT , and LSI are trademarks of LSI Logic Corporation Silicon Image is a trademark of Silicon Image, Inc. Information contained in this document is furnished by TYAN Computer Corporation and has been reviewed for accuracy and reliability prior to printing. TYAN assumes no liability whatsoever, and disclaims any express or implied warranty, relating to sale and/or use of TYAN products including liability or warranties relating to fitness for a particular purpose or merchantability. TYAN retains the right to make changes to product descriptions and/or specifications at any time, without notice. In no event will TYAN be held liable for any direct or indirect, incidental or consequential damage, loss of use, loss of data or other malady resulting from errors or inaccuracies of information contained in this document. -

Copyrighted Material
31_575767 bindex.qxd 12/28/04 8:42 PM Page 337 Index ports, 162–170 • Numerics • printers, 184 2-in-1 Dual Trigger (Thrustmaster), 330–331 Ray (Everglide) light-up mouse pad, 3Com networking equipment, 155 332–333 3-D scanners, 184 audio sound card, 126, 127–128 speaker systems, 181–183 benchmarking, 102 Super Multi DVD Drive GSA-4120B driver control applet, 113–114 (LG), 335 graphics card, 27, 116 2-in-1 Dual Trigger (Thrustmaster), graphics standards, 99 330–331 memory usage, 109 X-5500 speaker (Logitech), 333–334 scalability, 105 Zen Touch portable music player 3DMark05 benchmark, 102 (Creative), 334–335 32-bit CPU, 87 acoustic effects, sound card, 130–131 64-bit CPU, 87 ACPI (Advanced Configuration and Power Interface), 213 acrylic front panel • A • composition, 38 painting, 308 Abit Web site, 83 acrylic window AC’97 codec, 78 cutting, 287–288 Accelerated Graphics Port (AGP) bus securing, 18 contacts, location of, 110 Ad-Aware SE Personal, 228 described, 74–75 address fields, 87 expansion cards, installing, 50 ad-hoc network, 153 graphics card, memory allocation, 116, Advanced Configuration and Power 211–212 Interface (ACPI), 213 access point, wireless network, 153, 156 Advanced Technology Attachment packet accessories interface (ATAPI) BIOS integrated, 212–213 described, 146 budget, 170 hard drive, enabling DMA mode, 236–238 described, 161–162 installing, 149–150 Diamondback GamingCOPYRIGHTED Mouse (Razer), 328 MATERIAL motherboard expansion slots, 64 displays, 178–181 adware external storage, 184 described, 225 gaming controllers, -
User's Manual
SUPER ® X6DHP-8G USER’S MANUAL Revision 1.0a The information in this User’s Manual has been carefully reviewed and is believed to be accurate. The vendor assumes no responsibility for any inaccuracies that may be contained in this document, makes no commitment to update or to keep current the information in this manual, or to notify any person or organization of the updates. Please Note: For the most up-to-date version of this manual, please see our web site at www.supermicro.com. SUPERMICRO COMPUTER reserves the right to make changes to the product described in this manual at any time and without notice. This product, including software, if any, and documentation may not, in whole or in part, be copied, photocopied, reproduced, translated or reduced to any medium or machine without prior written consent. IN NO EVENT WILL SUPERMICRO COMPUTER BE LIABLE FOR DIRECT, INDIRECT, SPECIAL, INCIDENTAL, OR CONSEQUENTIAL DAMAGES ARISING FROM THE USE OR INABILITY TO USE THIS PRODUCT OR DOCUMENTATION, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. IN PARTICULAR, THE VENDOR SHALL NOT HAVE LIABILITY FOR ANY HARDWARE, SOFTWARE, OR DATA STORED OR USED WITH THE PRODUCT, INCLUDING THE COSTS OF REPAIRING, REPLACING, INTEGRATING, INSTALLING OR RECOVERING SUCH HARDWARE, SOFTWARE, OR DATA. Any disputes arising between manufacturer and customer shall be governed by the laws of Santa Clara County in the State of California, USA. The State of California, County of Santa Clara shall be the exclusive venue for the resolution of any such disputes. Supermicro's total liability for all claims will not exceed the price paid for the hardware product. -

INTERNAL COMPONENTS the Motherboard Is the Main Printed
INTERNAL COMPONENTS The motherboard is the main printed circuit board and contains the buses, or electrical pathways, found in a computer. These buses allow data to travel between the various components that comprise a computer. Figure 1 shows a variety of motherboards. A motherboard is also known as the system board or the main board. The motherboard accommodates the central processing unit (CPU), random access memory (RAM), expansion slots, heat sink and fan assembly, basic input/output system (BIOS) chip, chipset, and the circuitry that interconnects the motherboard components. Sockets, internal and external connectors, and various ports are also placed on the motherboard. The form factor of motherboards pertains to the size and shape of the board. It also describes the physical layout of the different components and devices on the motherboard. The form factor determines how individual components attach to the motherboard and the shape of the computer case. Various form factors exist for motherboards, as shown in this chart. The most common form factor in desktop computers was the AT, based on the IBM AT motherboard. The AT motherboard can be up to approximately 1 foot wide. This cumbersome size led to the development of smaller form factors. The placement of heat sinks and fans often interferes with the use of expansion slots in smaller form factors. A newer motherboard form factor, ATX, improved on the AT design. The ATX case accommodates the integrated I/O ports on the ATX motherboard. The ATX power supply connects to the motherboard via a single 20-pin connector, instead of the confusing P8 and P9 connectors used with some earlier form factors. -

Copyrighted Material
32_767727 bindex.qxd 9/26/05 10:48 PM Page 323 Index AGP (accelerated graphics port) • Numerics • slot, 54, 70–71 3-D accelerator chip, 30 video card, 90–91, 285 3-D spatial imaging, 158–159 AIFF format, 156 3-D video card, 32–33, 91–94 air, canned, 49 ➪ ➪ ➪ 3DMark05 utility (FutureMark), 91 All Programs Accessories System Tools 8-bit audio, 155 Disk Defragmenter, 306 16-bit audio, 155 AMD series CPU 24-bit color, 233 Athlon 64 series, 63, 64 24-bit sound, 154–155 Athlon XP, 64–65 32-bit PCI card, 154 overview of, 15 56 Kbps modem specification, 176 Sempron processor, 62, 63 64-bit support, 64 analog signal, 223 486 computer, 92 antiglare coating on monitor, 103 antistatic packaging, 11 antistatic strips, 53 • A • antivirus program, 207, 271 Apple iPod music player, 156 AAC format, 156 archiving, 123, 147 AC wiring, network using, 216 assembly, tips for accelerated graphics port (AGP) ask for help, 277–278 slot, 54, 70–71 check cables, 279–280 video card, 285 gather parts, 277 access time keep track of tiny objects, 276 of CD-ROM/DVD drive, 142 leave case off, 279 of hard drive, 117 read instructions, 275–276 AC-3 technology, 145 set up work space, 276 ad filtering, 254 start parts box, 278 adapter card. See also SCSI adapter card; take time, 279 sound card; video card use magnetic screwdriver, 278 care of, 11 assessing needs FM stereo/TV tuner, 254–255 basic designs, evaluating, 23–24 installing, 11 COPYRIGHTED MATERIAL economy-class design, 24–25 plugging in, 19, 20 power use design, 26–27 port, installing, 83–85 questions to ask, 21–23 -
Connector Contents
Connector Contents 1 Phone connector (audio) 1 1.1 Other connectors, other terms .................................... 1 1.2 Modern connectors .......................................... 1 1.2.1 Tiny telephone ........................................ 2 1.2.2 Less common ......................................... 2 1.3 Mono and stereo compatibility .................................... 3 1.4 Uses .................................................. 3 1.4.1 Computer sound ....................................... 5 1.4.2 Recording equipment ..................................... 6 1.4.3 Mobile phones ........................................ 7 1.4.4 Aircraft headsets ....................................... 8 1.5 Switch contacts ............................................ 8 1.6 Design ................................................ 9 1.6.1 Balanced audio ........................................ 10 1.6.2 Unbalanced audio ...................................... 10 1.7 See also ................................................ 11 1.8 References .............................................. 11 2 Edge connector 12 2.1 Socket design ............................................. 12 2.2 Uses .................................................. 12 2.3 See also ................................................ 12 2.4 References .............................................. 12 3 DIN connector 13 3.1 Circular connectors .......................................... 13 3.2 Loudspeaker connector ........................................ 14 3.3 Applications ............................................. -

There Are Two Classes of Electronic Components – Active and Passive
There are two classes of electronic components – active and passive. Active electronic components can control the Active flow of electricity. Most electronic printed circuit Electronic boards have at least one active component. Transistors, Components vacuum tubes, silicon- controlled rectifiers are all examples of active electronic components. ABBREVIATION [ACA] Anisotropic conductive adhesives Anisotropic are conductive in the Conductive Z-axis and are non- Adhesive conductive in the X- and Y-axis. ABBREVIATION [ACF] Anisotropic Conductive Film is an environmentally friendly and lead-free adhesive interconnect system that is Anisotropic commonly used in liquid crystal display (LCD) Conductive manufacturing to make the Film electrical and mechanical connections from the driver electronics to the glass substrates of the LCD. ABBREVIATION [AOI] Automated optical inspection is a key technique used when manufacturing and testing printed circuit boards. A camera autonomously scans printed circuit boards under test for both Automated catastrophic failure and quality defects. AOI enables fast and accurate inspection of electronics assemblies, Optical particularly printed circuit board assemblies, to ensure that the quality Inspection of product leaving the production line is high and the items are built correctly, without manufacturing faults. ABBREVIATION [ASIC] Application Specific Integrated Circuit is a chip that's custom designed for a specific application rather than a general-purpose chip. ASICs are used in a wide-range of Application applications, including auto emission control, environmental Specific monitoring, and personal digital assistants. ASICs are custom Integrated designed—ofen to be smaller, faster or more efficient. They are more Circuit expensive to design and manufacture, compared to standard logic integrated circuits. -
The Speeds in Which a Processor Can Send Data in a Pathway. There
CPU CPU-Central Processing Unit, The CPU is the brain of the computer. Sometimes referred to simply as the processor or central processor, the CPU is where most calculations take place. In terms of computing power, the CPU is the most important element of a computer system. The two biggest manufacturers of PC CPU chips are those made by Intel and AMD other CPU makers include Motorola, Via, and Cyrix Central Processing Unit (The Brain of the Computer) Two typical components of a CPU are: The arithmetic logic unit (ALU), which performs arithmetic and logical operations The control unit, which extracts instructions from memory and decodes and executes them, is calling on the ALU when necessary. CPU Terminology Clock speed: Given in megahertz (MHz) or higher (GHz), the clock speed determines how many instructions per second the processor can execute. Also called clock rate, the speed at which a microprocessor executes instructions. Every computer contains an internal clock that regulates the rate at which instructions are executed and synchronizes all the various computer components. The CPU requires a fixed number of clock ticks (or clock cycles) to execute each instruction. The faster the clock, the more instructions the CPU can execute per second. Clock speeds are expressed in megahertz (MHz), 1 MHz being equal to 1 million cycles per second. 1 MHz = 1 million clock cycle 1 GHz = 1 billion clock cycle Bus Speed The speeds in which a processor can send data in a pathway. There measured in the following speeds listed below: 33MHz, 66MHz, 100MHz, 133MHz, 166MHz, 200MHz, 233MHz, 266MHz, 333MHz, 400MHz, 800MHz, 1600MHz, 3200MHz and 6400MHz Bus Width 32 vs. -

Upgrading and Configuring a PC Motherboard Component
Upgrading and Configuring a PC Motherboard Component Upgrades Computer systems need periodic upgrades for various reasons: • User requirements change. • Upgraded software packages require new hardware. • New hardware offers enhanced performance. Changes to the computer may cause you to upgrade or replace components and peripherals. Research the effectiveness and cost for both upgrading and replacing. If you upgrade or replace a motherboard, you might have to replace other components, such as the CPU, heat sink and fan assembly, and RAM. A new motherboard must fit into the old computer case. The power supply must also be compatible for the new motherboard and be able to support all new computer components. Begin the upgrade by moving the CPU and the heat sink and fan assembly to the new motherboard. These items are much easier to work with when they are outside of the case. Work on an antistatic mat, and wear a wrist strap to avoid damaging the CPU. If the new motherboard requires a different CPU and RAM, install them at this time. Clean the thermal compound from the CPU and heat sink. Remember to use thermal compound between the CPU and the heat sink. CPU Installation Different CPU architectures are installed in these common socket connection designs: • Single-Edge Connector (SEC) • Low-Insertion Force (LIF) • Zero-Insertion Force (ZIF) • Land Grid Array (LGA) • Pin Grid Array (PGA) SEC and LIF sockets are no longer commonly used. Consult the motherboard documentation on how to install the CPU. Jumper Settings Jumpers are upright gold pins on the motherboard. Each grouping of two or more pins is called a jumper block.