Markov Random Fields Network Analysis 2014
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Infinite Dimensional Central Limit Theorem for Correlated Martingales
Ann. I. H. Poincaré – PR 40 (2004) 167–196 www.elsevier.com/locate/anihpb An infinite dimensional central limit theorem for correlated martingales Ilie Grigorescu 1 Department of Mathematics, University of Miami, 1365 Memorial Drive, Ungar Building, Room 525, Coral Gables, FL 33146, USA Received 6 March 2003; accepted 27 April 2003 Abstract The paper derives a functional central limit theorem for the empirical distributions of a system of strongly correlated continuous martingales at the level of the full trajectory space. We provide a general class of functionals for which the weak convergence to a centered Gaussian random field takes place. An explicit formula for the covariance is established and a characterization of the limit is given in terms of an inductive system of SPDEs. We also show a density theorem for a Sobolev- type class of functionals on the space of continuous functions. 2003 Elsevier SAS. All rights reserved. Résumé L’article présent dérive d’un théorème limite centrale fonctionnelle au niveau de l’espace de toutes les trajectoires continues pour les distributions empiriques d’un système de martingales fortement corrélées. Nous fournissons une classe générale de fonctions pour lesquelles est établie la convergence faible vers un champ aléatoire gaussien centré. Une formule explicite pour la covariance est determinée et on offre une charactérisation de la limite à l’aide d’un système inductif d’équations aux dérivées partielles stochastiques. On démontre également que l’espace de fonctions pour lesquelles le champ des fluctuations converge est dense dans une classe de fonctionnelles de type Sobolev sur l’espace des trajectoires continues. -

Methods of Monte Carlo Simulation II
Methods of Monte Carlo Simulation II Ulm University Institute of Stochastics Lecture Notes Dr. Tim Brereton Summer Term 2014 Ulm, 2014 2 Contents 1 SomeSimpleStochasticProcesses 7 1.1 StochasticProcesses . 7 1.2 RandomWalks .......................... 7 1.2.1 BernoulliProcesses . 7 1.2.2 RandomWalks ...................... 10 1.2.3 ProbabilitiesofRandomWalks . 13 1.2.4 Distribution of Xn .................... 13 1.2.5 FirstPassageTime . 14 2 Estimators 17 2.1 Bias, Variance, the Central Limit Theorem and Mean Square Error................................ 19 2.2 Non-AsymptoticErrorBounds. 22 2.3 Big O and Little o Notation ................... 23 3 Markov Chains 25 3.1 SimulatingMarkovChains . 28 3.1.1 Drawing from a Discrete Uniform Distribution . 28 3.1.2 Drawing From A Discrete Distribution on a Small State Space ........................... 28 3.1.3 SimulatingaMarkovChain . 28 3.2 Communication .......................... 29 3.3 TheStrongMarkovProperty . 30 3.4 RecurrenceandTransience . 31 3.4.1 RecurrenceofRandomWalks . 33 3.5 InvariantDistributions . 34 3.6 LimitingDistribution. 36 3.7 Reversibility............................ 37 4 The Poisson Process 39 4.1 Point Processes on [0, )..................... 39 ∞ 3 4 CONTENTS 4.2 PoissonProcess .......................... 41 4.2.1 Order Statistics and the Distribution of Arrival Times 44 4.2.2 DistributionofArrivalTimes . 45 4.3 SimulatingPoissonProcesses. 46 4.3.1 Using the Infinitesimal Definition to Simulate Approx- imately .......................... 46 4.3.2 SimulatingtheArrivalTimes . 47 4.3.3 SimulatingtheInter-ArrivalTimes . 48 4.4 InhomogenousPoissonProcesses. 48 4.5 Simulating an Inhomogenous Poisson Process . 49 4.5.1 Acceptance-Rejection. 49 4.5.2 Infinitesimal Approach (Approximate) . 50 4.6 CompoundPoissonProcesses . 51 5 ContinuousTimeMarkovChains 53 5.1 TransitionFunction. 53 5.2 InfinitesimalGenerator . 54 5.3 ContinuousTimeMarkovChains . -

12 : Conditional Random Fields 1 Hidden Markov Model
10-708: Probabilistic Graphical Models 10-708, Spring 2014 12 : Conditional Random Fields Lecturer: Eric P. Xing Scribes: Qin Gao, Siheng Chen 1 Hidden Markov Model 1.1 General parametric form In hidden Markov model (HMM), we have three sets of parameters, j i transition probability matrix A : p(yt = 1jyt−1 = 1) = ai;j; initialprobabilities : p(y1) ∼ Multinomial(π1; π2; :::; πM ); i emission probabilities : p(xtjyt) ∼ Multinomial(bi;1; bi;2; :::; bi;K ): 1.2 Inference k k The inference can be done with forward algorithm which computes αt ≡ µt−1!t(k) = P (x1; :::; xt−1; xt; yt = 1) recursively by k k X i αt = p(xtjyt = 1) αt−1ai;k; (1) i k k and the backward algorithm which computes βt ≡ µt t+1(k) = P (xt+1; :::; xT jyt = 1) recursively by k X i i βt = ak;ip(xt+1jyt+1 = 1)βt+1: (2) i Another key quantity is the conditional probability of any hidden state given the entire sequence, which can be computed by the dot product of forward message and backward message by, i i i i X i;j γt = p(yt = 1jx1:T ) / αtβt = ξt ; (3) j where we define, i;j i j ξt = p(yt = 1; yt−1 = 1; x1:T ); i j / µt−1!t(yt = 1)µt t+1(yt+1 = 1)p(xt+1jyt+1)p(yt+1jyt); i j i = αtβt+1ai;jp(xt+1jyt+1 = 1): The implementation in Matlab can be vectorized by using, i Bt(i) = p(xtjyt = 1); j i A(i; j) = p(yt+1 = 1jyt = 1): 1 2 12 : Conditional Random Fields The relation of those quantities can be simply written in pseudocode as, T αt = (A αt−1): ∗ Bt; βt = A(βt+1: ∗ Bt+1); T ξt = (αt(βt+1: ∗ Bt+1) ): ∗ A; γt = αt: ∗ βt: 1.3 Learning 1.3.1 Supervised Learning The supervised learning is trivial if only we know the true state path. -

Stochastic Differential Equations with Variational Wishart Diffusions
Stochastic Differential Equations with Variational Wishart Diffusions Martin Jørgensen 1 Marc Peter Deisenroth 2 Hugh Salimbeni 3 Abstract Why model the process noise? Assume that in the example above, the two states represent meteorological measure- We present a Bayesian non-parametric way of in- ments: rainfall and wind speed. Both are influenced by ferring stochastic differential equations for both confounders, such as atmospheric pressure, which are not regression tasks and continuous-time dynamical measured directly. This effect can in the case of the model modelling. The work has high emphasis on the in (1) only be modelled through the diffusion . Moreover, stochastic part of the differential equation, also wind and rain may not correlate identically for all states of known as the diffusion, and modelling it by means the confounders. of Wishart processes. Further, we present a semi- parametric approach that allows the framework Dynamical modelling with focus in the noise-term is not to scale to high dimensions. This successfully a new area of research. The most prominent one is the lead us onto how to model both latent and auto- Auto-Regressive Conditional Heteroskedasticity (ARCH) regressive temporal systems with conditional het- model (Engle, 1982), which is central to scientific fields eroskedastic noise. We provide experimental ev- like econometrics, climate science and meteorology. The idence that modelling diffusion often improves approach in these models is to estimate large process noise performance and that this randomness in the dif- when the system is exposed to a shock, i.e. an unforeseen ferential equation can be essential to avoid over- significant change in states. -
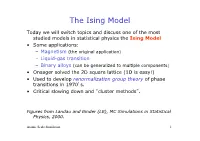
The Ising Model
The Ising Model Today we will switch topics and discuss one of the most studied models in statistical physics the Ising Model • Some applications: – Magnetism (the original application) – Liquid-gas transition – Binary alloys (can be generalized to multiple components) • Onsager solved the 2D square lattice (1D is easy!) • Used to develop renormalization group theory of phase transitions in 1970’s. • Critical slowing down and “cluster methods”. Figures from Landau and Binder (LB), MC Simulations in Statistical Physics, 2000. Atomic Scale Simulation 1 The Model • Consider a lattice with L2 sites and their connectivity (e.g. a square lattice). • Each lattice site has a single spin variable: si = ±1. • With magnetic field h, the energy is: N −β H H = −∑ Jijsis j − ∑ hisi and Z = ∑ e ( i, j ) i=1 • J is the nearest neighbors (i,j) coupling: – J > 0 ferromagnetic. – J < 0 antiferromagnetic. • Picture of spins at the critical temperature Tc. (Note that connected (percolated) clusters.) Atomic Scale Simulation 2 Mapping liquid-gas to Ising • For liquid-gas transition let n(r) be the density at lattice site r and have two values n(r)=(0,1). E = ∑ vijnin j + µ∑ni (i, j) i • Let’s map this into the Ising model spin variables: 1 s = 2n − 1 or n = s + 1 2 ( ) v v + µ H s s ( ) s c = ∑ i j + ∑ i + 4 (i, j) 2 i J = −v / 4 h = −(v + µ) / 2 1 1 1 M = s n = n = M + 1 N ∑ i N ∑ i 2 ( ) i i Atomic Scale Simulation 3 JAVA Ising applet http://physics.weber.edu/schroeder/software/demos/IsingModel.html Dynamically runs using heat bath algorithm. -

Pdf File of Second Edition, January 2018
Probability on Graphs Random Processes on Graphs and Lattices Second Edition, 2018 GEOFFREY GRIMMETT Statistical Laboratory University of Cambridge copyright Geoffrey Grimmett Geoffrey Grimmett Statistical Laboratory Centre for Mathematical Sciences University of Cambridge Wilberforce Road Cambridge CB3 0WB United Kingdom 2000 MSC: (Primary) 60K35, 82B20, (Secondary) 05C80, 82B43, 82C22 With 56 Figures copyright Geoffrey Grimmett Contents Preface ix 1 Random Walks on Graphs 1 1.1 Random Walks and Reversible Markov Chains 1 1.2 Electrical Networks 3 1.3 FlowsandEnergy 8 1.4 RecurrenceandResistance 11 1.5 Polya's Theorem 14 1.6 GraphTheory 16 1.7 Exercises 18 2 Uniform Spanning Tree 21 2.1 De®nition 21 2.2 Wilson's Algorithm 23 2.3 Weak Limits on Lattices 28 2.4 Uniform Forest 31 2.5 Schramm±LownerEvolutionsÈ 32 2.6 Exercises 36 3 Percolation and Self-Avoiding Walks 39 3.1 PercolationandPhaseTransition 39 3.2 Self-Avoiding Walks 42 3.3 ConnectiveConstantoftheHexagonalLattice 45 3.4 CoupledPercolation 53 3.5 Oriented Percolation 53 3.6 Exercises 56 4 Association and In¯uence 59 4.1 Holley Inequality 59 4.2 FKG Inequality 62 4.3 BK Inequalitycopyright Geoffrey Grimmett63 vi Contents 4.4 HoeffdingInequality 65 4.5 In¯uenceforProductMeasures 67 4.6 ProofsofIn¯uenceTheorems 72 4.7 Russo'sFormulaandSharpThresholds 80 4.8 Exercises 83 5 Further Percolation 86 5.1 Subcritical Phase 86 5.2 Supercritical Phase 90 5.3 UniquenessoftheIn®niteCluster 96 5.4 Phase Transition 99 5.5 OpenPathsinAnnuli 103 5.6 The Critical Probability in Two Dimensions 107 -

Mean Field Methods for Classification with Gaussian Processes
Mean field methods for classification with Gaussian processes Manfred Opper Neural Computing Research Group Division of Electronic Engineering and Computer Science Aston University Birmingham B4 7ET, UK. opperm~aston.ac.uk Ole Winther Theoretical Physics II, Lund University, S6lvegatan 14 A S-223 62 Lund, Sweden CONNECT, The Niels Bohr Institute, University of Copenhagen Blegdamsvej 17, 2100 Copenhagen 0, Denmark winther~thep.lu.se Abstract We discuss the application of TAP mean field methods known from the Statistical Mechanics of disordered systems to Bayesian classifi cation models with Gaussian processes. In contrast to previous ap proaches, no knowledge about the distribution of inputs is needed. Simulation results for the Sonar data set are given. 1 Modeling with Gaussian Processes Bayesian models which are based on Gaussian prior distributions on function spaces are promising non-parametric statistical tools. They have been recently introduced into the Neural Computation community (Neal 1996, Williams & Rasmussen 1996, Mackay 1997). To give their basic definition, we assume that the likelihood of the output or target variable T for a given input s E RN can be written in the form p(Tlh(s)) where h : RN --+ R is a priori assumed to be a Gaussian random field. If we assume fields with zero prior mean, the statistics of h is entirely defined by the second order correlations C(s, S') == E[h(s)h(S')], where E denotes expectations 310 M Opper and 0. Winther with respect to the prior. Interesting examples are C(s, s') (1) C(s, s') (2) The choice (1) can be motivated as a limit of a two-layered neural network with infinitely many hidden units with factorizable input-hidden weight priors (Williams 1997). -
MCMC Learning (Slides)
Uniform Distribution Learning Markov Random Fields Harmonic Analysis Experiments and Questions MCMC Learning Varun Kanade Elchanan Mossel UC Berkeley UC Berkeley August 30, 2013 Uniform Distribution Learning Markov Random Fields Harmonic Analysis Experiments and Questions Outline Uniform Distribution Learning Markov Random Fields Harmonic Analysis Experiments and Questions Uniform Distribution Learning Markov Random Fields Harmonic Analysis Experiments and Questions Uniform Distribution Learning • Unknown target function f : {−1; 1gn ! {−1; 1g from some class C • Uniform distribution over {−1; 1gn • Random Examples: Monotone Decision Trees [OS06] • Random Walk: DNF expressions [BMOS03] • Membership Query: DNF, TOP [J95] • Main Tool: Discrete Fourier Analysis X Y f (x) = f^(S)χS (x); χS (x) = xi S⊆[n] i2S • Can utilize sophisticated results: hypercontractivity, invariance, etc. • Connections to cryptography, hardness, de-randomization etc. • Unfortunately, too much of an idealization. In practice, variables are correlated. Uniform Distribution Learning Markov Random Fields Harmonic Analysis Experiments and Questions Markov Random Fields • Graph G = ([n]; E). Each node takes some value in finite set A. n • Distribution over A : (for φC non-negative, Z normalization constant) 1 Y Pr((σ ) ) = φ ((σ ) ) v v2[n] Z C v v2C clique C Uniform Distribution Learning Markov Random Fields Harmonic Analysis Experiments and Questions Markov Random Fields • MRFs widely used in vision, computational biology, biostatistics etc. • Extensive Algorithmic Theory for sampling from MRFs, recovering parameters and structures • Learning Question: Given f : An ! {−1; 1g. (How) Can we learn with respect to MRF distribution? • Can we utilize the structure of the MRF to aid in learning? Uniform Distribution Learning Markov Random Fields Harmonic Analysis Experiments and Questions Learning Model • Let M be a MRF with distribution π and f : An ! {−1; 1g the target function • Learning algorithm gets i.i.d. -

Arxiv:1511.03031V2
submitted to acta physica slovaca 1– 133 A BRIEF ACCOUNT OF THE ISING AND ISING-LIKE MODELS: MEAN-FIELD, EFFECTIVE-FIELD AND EXACT RESULTS Jozef Streckaˇ 1, Michal Jasˇcurˇ 2 Department of Theoretical Physics and Astrophysics, Faculty of Science, P. J. Saf´arikˇ University, Park Angelinum 9, 040 01 Koˇsice, Slovakia The present article provides a tutorial review on how to treat the Ising and Ising-like models within the mean-field, effective-field and exact methods. The mean-field approach is illus- trated on four particular examples of the lattice-statistical models: the spin-1/2 Ising model in a longitudinal field, the spin-1 Blume-Capel model in a longitudinal field, the mixed-spin Ising model in a longitudinal field and the spin-S Ising model in a transverse field. The mean- field solutions of the spin-1 Blume-Capel model and the mixed-spin Ising model demonstrate a change of continuous phase transitions to discontinuous ones at a tricritical point. A con- tinuous quantum phase transition of the spin-S Ising model driven by a transverse magnetic field is also explored within the mean-field method. The effective-field theory is elaborated within a single- and two-spin cluster approach in order to demonstrate an efficiency of this ap- proximate method, which affords superior approximate results with respect to the mean-field results. The long-standing problem of this method concerned with a self-consistent deter- mination of the free energy is also addressed in detail. More specifically, the effective-field theory is adapted for the spin-1/2 Ising model in a longitudinal field, the spin-S Blume-Capel model in a longitudinal field and the spin-1/2 Ising model in a transverse field. -

Statistical Field Theory University of Cambridge Part III Mathematical Tripos
Preprint typeset in JHEP style - HYPER VERSION Michaelmas Term, 2017 Statistical Field Theory University of Cambridge Part III Mathematical Tripos David Tong Department of Applied Mathematics and Theoretical Physics, Centre for Mathematical Sciences, Wilberforce Road, Cambridge, CB3 OBA, UK http://www.damtp.cam.ac.uk/user/tong/sft.html [email protected] –1– Recommended Books and Resources There are a large number of books which cover the material in these lectures, although often from very di↵erent perspectives. They have titles like “Critical Phenomena”, “Phase Transitions”, “Renormalisation Group” or, less helpfully, “Advanced Statistical Mechanics”. Here are some that I particularly like Nigel Goldenfeld, Phase Transitions and the Renormalization Group • Agreatbook,coveringthebasicmaterialthatwe’llneedanddelvingdeeperinplaces. Mehran Kardar, Statistical Physics of Fields • The second of two volumes on statistical mechanics. It cuts a concise path through the subject, at the expense of being a little telegraphic in places. It is based on lecture notes which you can find on the web; a link is given on the course website. John Cardy, Scaling and Renormalisation in Statistical Physics • Abeautifullittlebookfromoneofthemastersofconformalfieldtheory.Itcoversthe material from a slightly di↵erent perspective than these lectures, with more focus on renormalisation in real space. Chaikin and Lubensky, Principles of Condensed Matter Physics • Shankar, Quantum Field Theory and Condensed Matter • Both of these are more all-round condensed matter books, but with substantial sections on critical phenomena and the renormalisation group. Chaikin and Lubensky is more traditional, and packed full of content. Shankar covers modern methods of QFT, with an easygoing style suitable for bedtime reading. Anumberofexcellentlecturenotesareavailableontheweb.Linkscanbefoundon the course webpage: http://www.damtp.cam.ac.uk/user/tong/sft.html. -

Particle Filter Based Monitoring and Prediction of Spatiotemporal Corrosion Using Successive Measurements of Structural Responses
sensors Article Particle Filter Based Monitoring and Prediction of Spatiotemporal Corrosion Using Successive Measurements of Structural Responses Sang-ri Yi and Junho Song * Department of Civil and Environmental Engineering, Seoul National University, Seoul 08826, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-2-880-7369 Received: 11 October 2018; Accepted: 10 November 2018; Published: 13 November 2018 Abstract: Prediction of structural deterioration is a challenging task due to various uncertainties and temporal changes in the environmental conditions, measurement noises as well as errors of mathematical models used for predicting the deterioration progress. Monitoring of deterioration progress is also challenging even with successive measurements, especially when only indirect measurements such as structural responses are available. Recent developments of Bayesian filters and Bayesian inversion methods make it possible to address these challenges through probabilistic assimilation of successive measurement data and deterioration progress models. To this end, this paper proposes a new framework to monitor and predict the spatiotemporal progress of structural deterioration using successive, indirect and noisy measurements. The framework adopts particle filter for the purpose of real-time monitoring and prediction of corrosion states and probabilistic inference of uncertain and/or time-varying parameters in the corrosion progress model. In order to infer deterioration states from sparse indirect inspection data, for example structural responses at sensor locations, a Bayesian inversion method is integrated with the particle filter. The dimension of a continuous domain is reduced by the use of basis functions of truncated Karhunen-Loève expansion. The proposed framework is demonstrated and successfully tested by numerical experiments of reinforcement bar and steel plates subject to corrosion. -
Markov Random Fields: – Geman, Geman, “Stochastic Relaxation, Gibbs Distributions, and the Bayesian Restoration of Images”, IEEE PAMI 6, No
MarkovMarkov RandomRandom FieldsFields withwith ApplicationsApplications toto MM--repsreps ModelsModels Conglin Lu Medical Image Display and Analysis Group University of North Carolina, Chapel Hill MarkovMarkov RandomRandom FieldsFields withwith ApplicationsApplications toto MM--repsreps ModelsModels Outline: Background; Definition and properties of MRF; Computation; MRF m-reps models. MarkovMarkov RandomRandom FieldsFields Model a large collection of random variables with complex dependency relationships among them. MarkovMarkov RandomRandom FieldsFields • A model based approach; • Has been applied to a variety of problems: - Speech recognition - Natural language processing - Coding - Image analysis - Neural networks - Artificial intelligence • Usually used within the Bayesian framework. TheThe BayesianBayesian ParadigmParadigm X = space of the unknown variables, e.g. labels; Y = space of data (observations), e.g. intensity values; Given an observation y∈Y, want to make inference about x∈X. TheThe BayesianBayesian ParadigmParadigm Prior PX : probability distribution on X; Likelihood PY|X : conditional distribution of Y given X; Statistical inference is based on the posterior distribution PX|Y ∝ PX •PY|X . TheThe PriorPrior DistributionDistribution • Describes our assumption or knowledge about the model; • X is usually a high dimensional space. PX describes the joint distribution of a large number of random variables; • How do we define PX? MarkovMarkov RandomRandom FieldsFields withwith ApplicationsApplications toto MM--repsreps ModelsModels Outline: 9 Background; Definition and properties of MRF; Computation; MRF m-reps models. AssumptionsAssumptions •X = {Xs}s∈S, where each Xs is a random variable; S is an index set and is finite; • There is a common state space R:Xs∈R for all s ∈ S; | R | is finite; • Let Ω = {ω=(x , ..., x ): x ∈ , 1≤i≤N} be s1 sN si R the set of all possible configurations.