Markov Random Fields and Stochastic Image Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Image Segmentation Using K-Means Clustering and Thresholding
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395 -0056 Volume: 03 Issue: 05 | May-2016 www.irjet.net p-ISSN: 2395-0072 Image Segmentation using K-means clustering and Thresholding Preeti Panwar1, Girdhar Gopal2, Rakesh Kumar3 1M.Tech Student, Department of Computer Science & Applications, Kurukshetra University, Kurukshetra, Haryana 2Assistant Professor, Department of Computer Science & Applications, Kurukshetra University, Kurukshetra, Haryana 3Professor, Department of Computer Science & Applications, Kurukshetra University, Kurukshetra, Haryana ------------------------------------------------------------***------------------------------------------------------------ Abstract - Image segmentation is the division or changes in intensity, like edges in an image. Second separation of an image into regions i.e. set of pixels, pixels category is based on partitioning an image into regions in a region are similar according to some criterion such as that are similar according to some predefined criterion. colour, intensity or texture. This paper compares the color- Threshold approach comes under this category [4]. based segmentation with k-means clustering and thresholding functions. The k-means used partition cluster Image segmentation methods fall into different method. The k-means clustering algorithm is used to categories: Region based segmentation, Edge based partition an image into k clusters. K-means clustering and segmentation, and Clustering based segmentation, thresholding are used in this research -

An Infinite Dimensional Central Limit Theorem for Correlated Martingales
Ann. I. H. Poincaré – PR 40 (2004) 167–196 www.elsevier.com/locate/anihpb An infinite dimensional central limit theorem for correlated martingales Ilie Grigorescu 1 Department of Mathematics, University of Miami, 1365 Memorial Drive, Ungar Building, Room 525, Coral Gables, FL 33146, USA Received 6 March 2003; accepted 27 April 2003 Abstract The paper derives a functional central limit theorem for the empirical distributions of a system of strongly correlated continuous martingales at the level of the full trajectory space. We provide a general class of functionals for which the weak convergence to a centered Gaussian random field takes place. An explicit formula for the covariance is established and a characterization of the limit is given in terms of an inductive system of SPDEs. We also show a density theorem for a Sobolev- type class of functionals on the space of continuous functions. 2003 Elsevier SAS. All rights reserved. Résumé L’article présent dérive d’un théorème limite centrale fonctionnelle au niveau de l’espace de toutes les trajectoires continues pour les distributions empiriques d’un système de martingales fortement corrélées. Nous fournissons une classe générale de fonctions pour lesquelles est établie la convergence faible vers un champ aléatoire gaussien centré. Une formule explicite pour la covariance est determinée et on offre une charactérisation de la limite à l’aide d’un système inductif d’équations aux dérivées partielles stochastiques. On démontre également que l’espace de fonctions pour lesquelles le champ des fluctuations converge est dense dans une classe de fonctionnelles de type Sobolev sur l’espace des trajectoires continues. -

Methods of Monte Carlo Simulation II
Methods of Monte Carlo Simulation II Ulm University Institute of Stochastics Lecture Notes Dr. Tim Brereton Summer Term 2014 Ulm, 2014 2 Contents 1 SomeSimpleStochasticProcesses 7 1.1 StochasticProcesses . 7 1.2 RandomWalks .......................... 7 1.2.1 BernoulliProcesses . 7 1.2.2 RandomWalks ...................... 10 1.2.3 ProbabilitiesofRandomWalks . 13 1.2.4 Distribution of Xn .................... 13 1.2.5 FirstPassageTime . 14 2 Estimators 17 2.1 Bias, Variance, the Central Limit Theorem and Mean Square Error................................ 19 2.2 Non-AsymptoticErrorBounds. 22 2.3 Big O and Little o Notation ................... 23 3 Markov Chains 25 3.1 SimulatingMarkovChains . 28 3.1.1 Drawing from a Discrete Uniform Distribution . 28 3.1.2 Drawing From A Discrete Distribution on a Small State Space ........................... 28 3.1.3 SimulatingaMarkovChain . 28 3.2 Communication .......................... 29 3.3 TheStrongMarkovProperty . 30 3.4 RecurrenceandTransience . 31 3.4.1 RecurrenceofRandomWalks . 33 3.5 InvariantDistributions . 34 3.6 LimitingDistribution. 36 3.7 Reversibility............................ 37 4 The Poisson Process 39 4.1 Point Processes on [0, )..................... 39 ∞ 3 4 CONTENTS 4.2 PoissonProcess .......................... 41 4.2.1 Order Statistics and the Distribution of Arrival Times 44 4.2.2 DistributionofArrivalTimes . 45 4.3 SimulatingPoissonProcesses. 46 4.3.1 Using the Infinitesimal Definition to Simulate Approx- imately .......................... 46 4.3.2 SimulatingtheArrivalTimes . 47 4.3.3 SimulatingtheInter-ArrivalTimes . 48 4.4 InhomogenousPoissonProcesses. 48 4.5 Simulating an Inhomogenous Poisson Process . 49 4.5.1 Acceptance-Rejection. 49 4.5.2 Infinitesimal Approach (Approximate) . 50 4.6 CompoundPoissonProcesses . 51 5 ContinuousTimeMarkovChains 53 5.1 TransitionFunction. 53 5.2 InfinitesimalGenerator . 54 5.3 ContinuousTimeMarkovChains . -

Computer Vision Segmentation and Perceptual Grouping
CS534 A. Elgammal Rutgers University CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science Rutgers University CS 534 – Segmentation - 1 Outlines • Mid-level vision • What is segmentation • Perceptual Grouping • Segmentation by clustering • Graph-based clustering • Image segmentation using Normalized cuts CS 534 – Segmentation - 2 1 CS534 A. Elgammal Rutgers University Mid-level vision • Vision as an inference problem: – Some observation/measurements (images) – A model – Objective: what caused this measurement ? • What distinguishes vision from other inference problems ? – A lot of data. – We don’t know which of these data may be useful to solve the inference problem and which may not. • Which pixels are useful and which are not ? • Which edges are useful and which are not ? • Which texture features are useful and which are not ? CS 534 – Segmentation - 3 Why do these tokens belong together? It is difficult to tell whether a pixel (token) lies on a surface by simply looking at the pixel CS 534 – Segmentation - 4 2 CS534 A. Elgammal Rutgers University • One view of segmentation is that it determines which component of the image form the figure and which form the ground. • What is the figure and the background in this image? Can be ambiguous. CS 534 – Segmentation - 5 Grouping and Gestalt • Gestalt: German for form, whole, group • Laws of Organization in Perceptual Forms (Gestalt school of psychology) Max Wertheimer 1912-1923 “there are contexts in which what is happening in the whole cannot be deduced from the characteristics of the separate pieces, but conversely; what happens to a part of the whole is, in clearcut cases, determined by the laws of the inner structure of its whole” Muller-Layer effect: This effect arises from some property of the relationships that form the whole rather than from the properties of each separate segment. -

12 : Conditional Random Fields 1 Hidden Markov Model
10-708: Probabilistic Graphical Models 10-708, Spring 2014 12 : Conditional Random Fields Lecturer: Eric P. Xing Scribes: Qin Gao, Siheng Chen 1 Hidden Markov Model 1.1 General parametric form In hidden Markov model (HMM), we have three sets of parameters, j i transition probability matrix A : p(yt = 1jyt−1 = 1) = ai;j; initialprobabilities : p(y1) ∼ Multinomial(π1; π2; :::; πM ); i emission probabilities : p(xtjyt) ∼ Multinomial(bi;1; bi;2; :::; bi;K ): 1.2 Inference k k The inference can be done with forward algorithm which computes αt ≡ µt−1!t(k) = P (x1; :::; xt−1; xt; yt = 1) recursively by k k X i αt = p(xtjyt = 1) αt−1ai;k; (1) i k k and the backward algorithm which computes βt ≡ µt t+1(k) = P (xt+1; :::; xT jyt = 1) recursively by k X i i βt = ak;ip(xt+1jyt+1 = 1)βt+1: (2) i Another key quantity is the conditional probability of any hidden state given the entire sequence, which can be computed by the dot product of forward message and backward message by, i i i i X i;j γt = p(yt = 1jx1:T ) / αtβt = ξt ; (3) j where we define, i;j i j ξt = p(yt = 1; yt−1 = 1; x1:T ); i j / µt−1!t(yt = 1)µt t+1(yt+1 = 1)p(xt+1jyt+1)p(yt+1jyt); i j i = αtβt+1ai;jp(xt+1jyt+1 = 1): The implementation in Matlab can be vectorized by using, i Bt(i) = p(xtjyt = 1); j i A(i; j) = p(yt+1 = 1jyt = 1): 1 2 12 : Conditional Random Fields The relation of those quantities can be simply written in pseudocode as, T αt = (A αt−1): ∗ Bt; βt = A(βt+1: ∗ Bt+1); T ξt = (αt(βt+1: ∗ Bt+1) ): ∗ A; γt = αt: ∗ βt: 1.3 Learning 1.3.1 Supervised Learning The supervised learning is trivial if only we know the true state path. -

Stochastic Differential Equations with Variational Wishart Diffusions
Stochastic Differential Equations with Variational Wishart Diffusions Martin Jørgensen 1 Marc Peter Deisenroth 2 Hugh Salimbeni 3 Abstract Why model the process noise? Assume that in the example above, the two states represent meteorological measure- We present a Bayesian non-parametric way of in- ments: rainfall and wind speed. Both are influenced by ferring stochastic differential equations for both confounders, such as atmospheric pressure, which are not regression tasks and continuous-time dynamical measured directly. This effect can in the case of the model modelling. The work has high emphasis on the in (1) only be modelled through the diffusion . Moreover, stochastic part of the differential equation, also wind and rain may not correlate identically for all states of known as the diffusion, and modelling it by means the confounders. of Wishart processes. Further, we present a semi- parametric approach that allows the framework Dynamical modelling with focus in the noise-term is not to scale to high dimensions. This successfully a new area of research. The most prominent one is the lead us onto how to model both latent and auto- Auto-Regressive Conditional Heteroskedasticity (ARCH) regressive temporal systems with conditional het- model (Engle, 1982), which is central to scientific fields eroskedastic noise. We provide experimental ev- like econometrics, climate science and meteorology. The idence that modelling diffusion often improves approach in these models is to estimate large process noise performance and that this randomness in the dif- when the system is exposed to a shock, i.e. an unforeseen ferential equation can be essential to avoid over- significant change in states. -

Image Segmentation Based on Histogram Analysis Utilizing the Cloud Model
Computers and Mathematics with Applications 62 (2011) 2824–2833 Contents lists available at SciVerse ScienceDirect Computers and Mathematics with Applications journal homepage: www.elsevier.com/locate/camwa Image segmentation based on histogram analysis utilizing the cloud model Kun Qin a,∗, Kai Xu a, Feilong Liu b, Deyi Li c a School of Remote Sensing Information Engineering, Wuhan University, Wuhan, 430079, China b Bahee International, Pleasant Hill, CA 94523, USA c Beijing Institute of Electronic System Engineering, Beijing, 100039, China article info a b s t r a c t Keywords: Both the cloud model and type-2 fuzzy sets deal with the uncertainty of membership Image segmentation which traditional type-1 fuzzy sets do not consider. Type-2 fuzzy sets consider the Histogram analysis fuzziness of the membership degrees. The cloud model considers fuzziness, randomness, Cloud model Type-2 fuzzy sets and the association between them. Based on the cloud model, the paper proposes an Probability to possibility transformations image segmentation approach which considers the fuzziness and randomness in histogram analysis. For the proposed method, first, the image histogram is generated. Second, the histogram is transformed into discrete concepts expressed by cloud models. Finally, the image is segmented into corresponding regions based on these cloud models. Segmentation experiments by images with bimodal and multimodal histograms are used to compare the proposed method with some related segmentation methods, including Otsu threshold, type-2 fuzzy threshold, fuzzy C-means clustering, and Gaussian mixture models. The comparison experiments validate the proposed method. ' 2011 Elsevier Ltd. All rights reserved. 1. Introduction In order to deal with the uncertainty of image segmentation, fuzzy sets were introduced into the field of image segmentation, and some methods were proposed in the literature. -
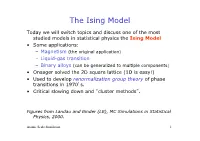
The Ising Model
The Ising Model Today we will switch topics and discuss one of the most studied models in statistical physics the Ising Model • Some applications: – Magnetism (the original application) – Liquid-gas transition – Binary alloys (can be generalized to multiple components) • Onsager solved the 2D square lattice (1D is easy!) • Used to develop renormalization group theory of phase transitions in 1970’s. • Critical slowing down and “cluster methods”. Figures from Landau and Binder (LB), MC Simulations in Statistical Physics, 2000. Atomic Scale Simulation 1 The Model • Consider a lattice with L2 sites and their connectivity (e.g. a square lattice). • Each lattice site has a single spin variable: si = ±1. • With magnetic field h, the energy is: N −β H H = −∑ Jijsis j − ∑ hisi and Z = ∑ e ( i, j ) i=1 • J is the nearest neighbors (i,j) coupling: – J > 0 ferromagnetic. – J < 0 antiferromagnetic. • Picture of spins at the critical temperature Tc. (Note that connected (percolated) clusters.) Atomic Scale Simulation 2 Mapping liquid-gas to Ising • For liquid-gas transition let n(r) be the density at lattice site r and have two values n(r)=(0,1). E = ∑ vijnin j + µ∑ni (i, j) i • Let’s map this into the Ising model spin variables: 1 s = 2n − 1 or n = s + 1 2 ( ) v v + µ H s s ( ) s c = ∑ i j + ∑ i + 4 (i, j) 2 i J = −v / 4 h = −(v + µ) / 2 1 1 1 M = s n = n = M + 1 N ∑ i N ∑ i 2 ( ) i i Atomic Scale Simulation 3 JAVA Ising applet http://physics.weber.edu/schroeder/software/demos/IsingModel.html Dynamically runs using heat bath algorithm. -

A Class of Measure-Valued Markov Chains and Bayesian Nonparametrics
Bernoulli 18(3), 2012, 1002–1030 DOI: 10.3150/11-BEJ356 A class of measure-valued Markov chains and Bayesian nonparametrics STEFANO FAVARO1, ALESSANDRA GUGLIELMI2 and STEPHEN G. WALKER3 1Universit`adi Torino and Collegio Carlo Alberto, Dipartimento di Statistica e Matematica Ap- plicata, Corso Unione Sovietica 218/bis, 10134 Torino, Italy. E-mail: [email protected] 2Politecnico di Milano, Dipartimento di Matematica, P.zza Leonardo da Vinci 32, 20133 Milano, Italy. E-mail: [email protected] 3University of Kent, Institute of Mathematics, Statistics and Actuarial Science, Canterbury CT27NZ, UK. E-mail: [email protected] Measure-valued Markov chains have raised interest in Bayesian nonparametrics since the seminal paper by (Math. Proc. Cambridge Philos. Soc. 105 (1989) 579–585) where a Markov chain having the law of the Dirichlet process as unique invariant measure has been introduced. In the present paper, we propose and investigate a new class of measure-valued Markov chains defined via exchangeable sequences of random variables. Asymptotic properties for this new class are derived and applications related to Bayesian nonparametric mixture modeling, and to a generalization of the Markov chain proposed by (Math. Proc. Cambridge Philos. Soc. 105 (1989) 579–585), are discussed. These results and their applications highlight once again the interplay between Bayesian nonparametrics and the theory of measure-valued Markov chains. Keywords: Bayesian nonparametrics; Dirichlet process; exchangeable sequences; linear functionals -

Regularity of Solutions and Parameter Estimation for Spde’S with Space-Time White Noise
REGULARITY OF SOLUTIONS AND PARAMETER ESTIMATION FOR SPDE’S WITH SPACE-TIME WHITE NOISE by Igor Cialenco A Dissertation Presented to the FACULTY OF THE GRADUATE SCHOOL UNIVERSITY OF SOUTHERN CALIFORNIA In Partial Fulfillment of the Requirements for the Degree DOCTOR OF PHILOSOPHY (APPLIED MATHEMATICS) May 2007 Copyright 2007 Igor Cialenco Dedication To my wife Angela, and my parents. ii Acknowledgements I would like to acknowledge my academic adviser Prof. Sergey V. Lototsky who introduced me into the Theory of Stochastic Partial Differential Equations, suggested the interesting topics of research and guided me through it. I also wish to thank the members of my committee - Prof. Remigijus Mikulevicius and Prof. Aris Protopapadakis, for their help and support. Last but certainly not least, I want to thank my wife Angela, and my family for their support both during the thesis and before it. iii Table of Contents Dedication ii Acknowledgements iii List of Tables v List of Figures vi Abstract vii Chapter 1: Introduction 1 1.1 Sobolev spaces . 1 1.2 Diffusion processes and absolute continuity of their measures . 4 1.3 Stochastic partial differential equations and their applications . 7 1.4 Ito’sˆ formula in Hilbert space . 14 1.5 Existence and uniqueness of solution . 18 Chapter 2: Regularity of solution 23 2.1 Introduction . 23 2.2 Equations with additive noise . 29 2.2.1 Existence and uniqueness . 29 2.2.2 Regularity in space . 33 2.2.3 Regularity in time . 38 2.3 Equations with multiplicative noise . 41 2.3.1 Existence and uniqueness . 41 2.3.2 Regularity in space and time . -
Markov Process Duality
Markov Process Duality Jan M. Swart Luminy, October 23 and 24, 2013 Jan M. Swart Markov Process Duality Markov Chains S finite set. RS space of functions f : S R. ! S For probability kernel P = (P(x; y))x;y2S and f R define left and right multiplication as 2 X X Pf (x) := P(x; y)f (y) and fP(x) := f (y)P(y; x): y y (I do not distinguish row and column vectors.) Def Chain X = (Xk )k≥0 of S-valued r.v.'s is Markov chain with transition kernel P and state space S if S E f (Xk+1) (X0;:::; Xk ) = Pf (Xk ) a:s: (f R ) 2 P (X0;:::; Xk ) = (x0;:::; xk ) , = P[X0 = x0]P(x0; x1) P(xk−1; xk ): ··· µ µ µ Write P ; E for process with initial law µ = P [X0 ]. x δx x 2 · P := P with δx (y) := 1fx=yg. E similar. Jan M. Swart Markov Process Duality Markov Chains Set k µ k x µk := µP (x) = P [Xk = x] and fk := P f (x) = E [f (Xk )]: Then the forward and backward equations read µk+1 = µk P and fk+1 = Pfk : In particular π invariant law iff πP = π. Function h harmonic iff Ph = h h(Xk ) martingale. , Jan M. Swart Markov Process Duality Random mapping representation (Zk )k≥1 i.i.d. with common law ν, take values in (E; ). φ : S E S measurable E × ! P(x; y) = P[φ(x; Z1) = y]: Random mapping representation (E; ; ν; φ) always exists, highly non-unique. -

1 Introduction Branching Mechanism in a Superprocess from a Branching
数理解析研究所講究録 1157 巻 2000 年 1-16 1 An example of random snakes by Le Gall and its applications 渡辺信三 Shinzo Watanabe, Kyoto University 1 Introduction The notion of random snakes has been introduced by Le Gall ([Le 1], [Le 2]) to construct a class of measure-valued branching processes, called superprocesses or continuous state branching processes ([Da], [Dy]). A main idea is to produce the branching mechanism in a superprocess from a branching tree embedded in excur- sions at each different level of a Brownian sample path. There is no clear notion of particles in a superprocess; it is something like a cloud or mist. Nevertheless, a random snake could provide us with a clear picture of historical or genealogical developments of”particles” in a superprocess. ” : In this note, we give a sample pathwise construction of a random snake in the case when the underlying Markov process is a Markov chain on a tree. A simplest case has been discussed in [War 1] and [Wat 2]. The construction can be reduced to this case locally and we need to consider a recurrence family of stochastic differential equations for reflecting Brownian motions with sticky boundaries. A special case has been already discussed by J. Warren [War 2] with an application to a coalescing stochastic flow of piece-wise linear transformations in connection with a non-white or non-Gaussian predictable noise in the sense of B. Tsirelson. 2 Brownian snakes Throughout this section, let $\xi=\{\xi(t), P_{x}\}$ be a Hunt Markov process on a locally compact separable metric space $S$ endowed with a metric $d_{S}(\cdot, *)$ .